

Ijraset Journal For Research in Applied Science and Engineering Technology
Implementation of Autonomous Drone for Flood Surveillance
Authors: G. Chandraiah, M. Swarna Latha, K. Hema, H. Kaavya, K. Vijay Simha Reddy, J. Dilip Babu
DOI Link: https://doi.org/10.22214/ijraset.2024.62121
Certificate: View Certificate
Abstract
Floods are natural disasters that pose significant challenges to both the safety of communities and the effectiveness of response efforts. In recent years, the integration of unmanned aerial vehicles, commonly known as drones, has emerged as a valuable tool in flood surveillance. This paper provides an overview of the multifaceted role of drones in flood-related scenarios, highlighting their capabilities, benefits, and potential challenges. Drones have demonstrated their versatility in flood management by offering several critical functions. Drones enhance the safety of response teams by providing situational awareness without exposing personnel to hazardous conditions. They can be deployed to access remote or inaccessible areas, where human intervention is challenging or dangerous. Drones equipped with thermal imaging cameras also support search and rescue missions, increasing the chances of locating and saving individuals trapped by floodwaters. In addition to assessment and rescue, drones contribute to flood forecasting and early warning systems. By continuously monitoring water levels, weather conditions, and flood dynamics, drones provide essential data for improving flood prediction models. This information helps authorities issue timely warnings, enabling communities to prepare and evacuate when necessary.
Introduction
I. INTRODUCTION
Unmanned aerial vehicles (UAVs), commonly known as drones, represent a significant technological advancement in aviation. These aircraft, devoid of onboard human pilots, are controlled either autonomously by onboard computers or remotely by operators stationed on the ground or in other vehicles. While initially associated primarily with military applications, UAVs have since found diverse roles in civil aviation. Civil applications of UAV technology have proliferated, encompassing tasks such as crop surveillance, aerial cinematography for filmmaking, search and rescue missions, infrastructure inspection, wildlife monitoring, and advertising, among others. Utilizing materials like EPP foam, brushless motors, servos, Electronic Speed Controllers (ESCs), and 2.4 GHz Transmitters and Receivers (Tx/Rx), small-scale UAVs can be designed with relative simplicity. Delta mixing, a technique involving eleven mixing methods, streamlines the hardware requirements and design complexity of UAV models, making them suitable for commercial purposes such as aerial surveillance, remote sensing, and scientific research. The versatility of UAV technology extends across various sectors, serving military and civilian markets alike. With wingspans ranging from 7 inches to 13 feet, UAVs come in diverse physical configurations, including mini-UAVs with wingspans spanning 21 inches to 10 feet. These aircraft adhere to the fundamental principles of thermodynamics and physics, albeit with considerable variation in size and design. unmanned aerial vehicles represent a burgeoning technological frontier with myriad applications spanning military reconnaissance to civilian surveillance and beyond. Their adaptability, driven by advancements in design and technology, continues to expand their role in diverse fields, promising further innovation and development in the future.
II. PROPOSED DRONE SYSTEM
A. Introduction
An autonomous flood monitoring drone refers to an unmanned aerial vehicle (UAV) equipped with sophisticated technology and programmed to perform various tasks related to flood management without constant human intervention. These drones are designed to operate autonomously, carrying out missions for assessing, monitoring, and responding to flood situations, they provide live updates and telemetry on flood conditions, water levels, infrastructure damage, and potential risks, aiding in timely decision-making.
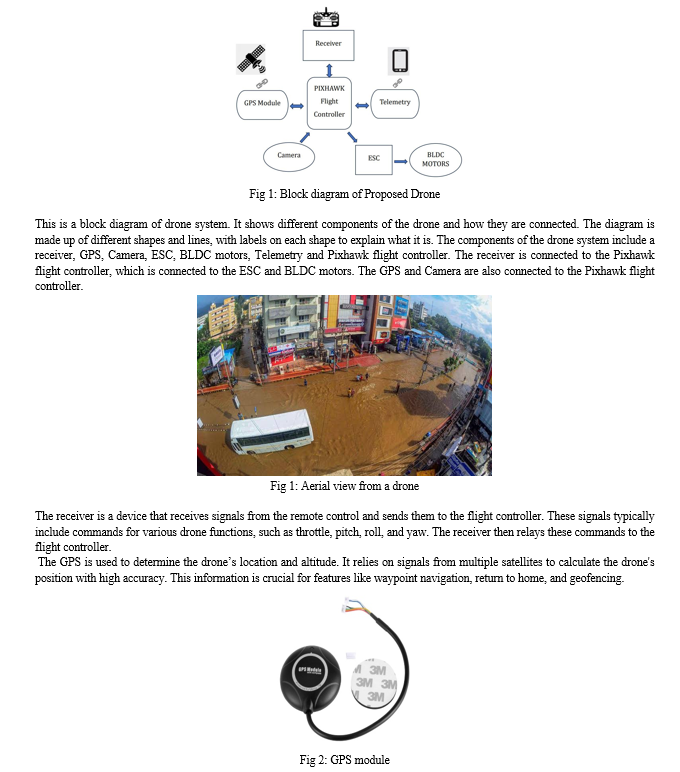

B. Implementation
The operational sequence of a drone initiates with the activation of the Pixhawk 1.7 in the transmitter-receiver section. By selecting the Arm option, the Quadcopter becomes operational upon Pixhawk 1.7 activation, whereas opting for Disarm results in the shutdown of the entire circuit. The transmitter-receiver module facilitates manual control of the quadcopter. Subsequently, the GPS system determines the current location of the quadcopter, and the Mission Planner software is utilized to establish a predefined path using waypoints.
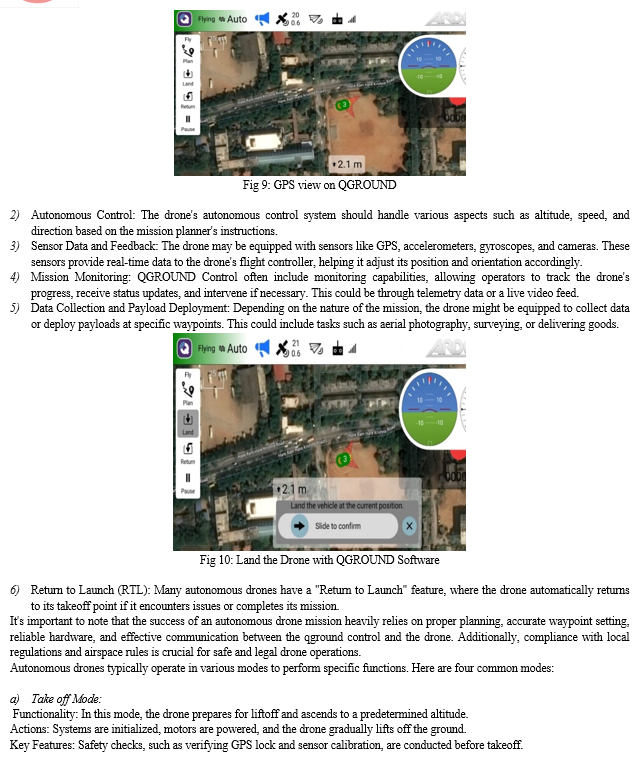
The Pixhawk 1.7 module then calculates the difference between the current GPS-derived location and the specified waypoint. Based on this calculation, signals are transmitted to the Electronic Speed Control (ESC) to prompt the quadcopter's movement in the desired direction. The ESC, serving as an interface device, regulates motor speed according to controller inputs. The Pixhawk 1.7 communicates with all four ESCs to ensure the coordinated movement of the quadcopter. Unlike helicopters where a single motor bears the entire weight, each motor in the quadcopter shares 1/4 of the weight, enhancing versatility.
To enhance functionality, a mobile camera is integrated into the quadcopter, allowing ground station control. Brushless motors are chosen for their high torque capabilities. The drone must possess sufficient payload capacity, stabilization, and localization capabilities. Quadcopter movement is dictated by the rotation speed of its four motors. For example, to move forward, the rear motors rotate at a higher RPM than the front motors. The surveillance process employs on-board transmitters and receivers. The ground station, connected wirelessly to the quadcopter, is managed by software commands, enabling autonomous flight.
III. RESULT
The result of an autonomous drone operated by qground control and given waypoints depends on various factors, including the specific mission parameters, drone capabilities, environmental conditions, and the accuracy of the mission planning.
Conclusion
In accordance with the specified design criteria, the surveillance functionality is closely monitored under human supervision, proving advantageous for flood surveillance. Additionally, it can be employed for capturing aerial photographs of flood-affected regions. Its ease of maneuverability offers flexibility in movement, and its adaptability extends to providing night surveillance through infrared cameras. The system has the potential for further enhancement to cater to future needs. The quadcopter is equipped with a GPS data logger that records its current latitude, longitude, and altitude in a comma-separated value file format, facilitating mapping applications. Consequently, the proposed drone serves as a valuable tool for the surveillance and monitoring of diverse locations and terrains. In areas where human intervention involves life-threatening risks and challenging conditions, the deployment of autonomous surveillance drones emerges as a viable solution to mitigate these challenges.
References
[1] W,A. Babcock, W,H. Freivogel, The SAGE Guide to Key Issues in Mass Media Ethics and Law, SAGE Publications, 2015, ISBN 1506317278. [2] Deepika M, Vijay K. Cuddapah, A Srivastava, S Mahankali, AI & ML - Powering the Agents of Automation: Demystifying, IOT, Robots, Chat Bots, RPA, Drones & Autonomous Cars- The new workforce led Digital Reinvention facilitated by AI & ML and secured through Block chain, BPB Publications, 2019, ISBN 9388511638. [3] Serge A. Wich, Lian Pin Koh, Conservation Drones: Mapping and Monitoring Biodiversity, Oxford University Press, 2018, ISBN 0198787618. [4] Paul G. Fahlstrom, Thomas J. Gleason, Mohammad H. Sadraey, Introduction to UAV Systems Aerospace Series, John Wiley & Sons, 2022, ISBN 111980261X. [5] Sandeeep Khajure, Vaibhav Surwade, Vivek Badak, “Design of A Quad Copter and Fabrication”, International Advanced Research Journal in Science, Engineering and Technology , vol. 3, issue 2, Feb 2016. [6] Anurag Singh Rajpoot, Namrata Gadani, Sagar Kalathia, “Development of Arduino Based Quadcopter”, International Advanced Research Journal in Science, Engineering and Technology, vol. 3, issue 6, June 2016. [7] Sravan kumar N, Ram Kishore Sankaralingam, “Design and Control Implementation Of Quadcopter”, International Journal of Mechanical And Production Engineering, vol 4, issue 5, May 2016
Copyright
Copyright © 2024 G. Chandraiah, M. Swarna Latha, K. Hema, H. Kaavya, K. Vijay Simha Reddy, J. Dilip Babu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62121
Publish Date : 2024-05-14
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online