

Ijraset Journal For Research in Applied Science and Engineering Technology
Integration of Colour Decoding Agri Fertilizer Robot
Authors: Rushikesh Waghmare, Vaibhav Bhalekar, Sumit Gaikwad, Shreyas Sutar
DOI Link: https://doi.org/10.22214/ijraset.2024.60478
Certificate: View Certificate
Abstract
In India, the most widely used pesticide sprayer among farmers is the backpack type due to its affordability and simplicity. However, manual operation is time-consuming and poses health risks. To address these issues, we propose a robotic system with a plant spraying mechanism capable of adjusting spray settings for different colors. This compact, portable platform utilizes sensor technology for autonomous navigation. Our aim is to design a pesticide sprayer with adjustable spraying intervals and color variations, with a focus on the 3D design aspects of the system.
Introduction
I. INTRODUCTION
In India, the backpack type pesticide sprayer is widely favored among farmers for its affordability and simplicity, despite its time-consuming manual operation. However, manual spraying poses health risks to farmers and can lead to lumbar pain due to the equipment's weight. To address these challenges, our project focuses on designing and constructing a robotic system equipped with a plant spraying mechanism for pesticides. This system offers adjustable spray settings and aims to provide a compact, portable, and autonomous platform for farmland surveying.

While many industries and automobile sectors are embracing automation and artificial intelligence to reduce workload, the agricultural sector in India still heavily relies on manual labor, leading to significant resource and financial demands. Recognizing this gap, our project, titled "Design, Analysis & Development of an Integrated Colour Decoding Agriculture Fertilizing (Spraying) Wireless Robot," aims to introduce automation into agricultural practices.
Our robot features a mechanical frame, wheels, DC motors, a dummy wheel holder for front wheels, Arduino Uno, Bluetooth module, battery, and L293D motor driver, enabling wireless movement in desired directions. Additionally, it is equipped with an auto-spraying system utilizing a TCS3200 color sensor, mini water motor, transparent tube, and nozzle for dispensing fertilizer or water fluid.
By integrating technology and automation into agriculture, our project seeks to streamline processes, reduce labor dependency, and improve efficiency in farming practices.
II. LITERATURE REVIEW
- Autonomous Pesticide Spraying Robot For Use In A Greenhouse Philip J. Sammons, Tomonari Furukawa And Andrew Bulgin
In This project author had presented: solution to the current human health hazards involved in spraying potentially toxic chemicals in the confined space of a hot and steamy glasshouse. This is achieved by the construction of an autonomous mobile robot for use in pest control and disease prevention applications in commercial greenhouses by navigating the area land by itself.
2. Solar Based Pesticide Sprayer” Project Reference No. : 37s0497 Mohan Badiger. Kartikeya Bhat.
In this project author had constructed renewable solar spraying machine, because in vast land power supply problem occurs and spraying robot with auto time setting for constant spraying of sprinkler robot with the help of Arduino controller.
3. Solar Based Pesticide Sprayer” Project Reference No. : 37s0497mohan Badiger. Kartikeya Bhat.
Sprayers are mechanical devices that are specifically designed to spray liquids quickly and easily.
Solar based pesticides sprayer pump is one of the improved version of petrol engine pesticide sprayer pump.
It is vastly used in the agriculture field & also used for many purposes.
III. PROBLEM STATEMENT
A. Problem Statement
Ensuring plants receive proper water is crucial for their health and vitality. Without adequate hydration, plants may experience various negative effects, including stunted growth, decreased vigor, and in severe cases, death. Here's why water is essential for plants:
- Photosynthesis: Water is vital for the process of photosynthesis, where plants convert sunlight into energy. Insufficient water hampers this process, leading to a lack of energy and nutrients needed for growth.
- Leaf Dropping: During periods of water scarcity, plants may shed their leaves prematurely to conserve water. This reduces their ability to photosynthesize and gather energy, weakening them further.
To address these challenges, designing and developing automated equipment for precise plant hydration is crucial. By integrating a color sensor, the system can automatically detect leaf color and administer appropriate fertilization. Operating wirelessly, this system eliminates the need for manual fertilization, which can lead to excessive and improper spraying. Real-time monitoring ensures each plant receives the necessary care, enhancing overall growth and health.
B. Objective
Our project aims to revolutionize agricultural spraying practices by introducing automation and enhancing efficiency. We are developing an automated wireless color decoding Agri-spraying system designed to eliminate the need for manual labor and reduce time consumption significantly. By addressing bacterial factors associated with manual spraying techniques, we strive to improve overall crop health and yield. Our approach involves designing and analyzing the system meticulously using Catia V5 and ANSYS Workbench to ensure optimal performance and structural integrity. Furthermore, we are dedicated to procuring components, fabricating them to precise specifications, and assembling them seamlessly to create a fully operational system. Through coding for automation, our goal is to enable autonomous spraying in agricultural settings, thus advancing the sector towards a more sustainable and efficient future.
IV. PROPOSED METHODOLOGY
A. Block Diagram
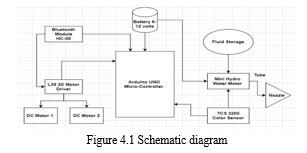
The proposed Model works on a principal of Mechatronics Combination. The system has a mechanical frame work with embedded integration to make it fully autonomous. As we have discussed in above point. The system has all the necessary components to make the proposed system fully autonomous.
B. Construction Procedure
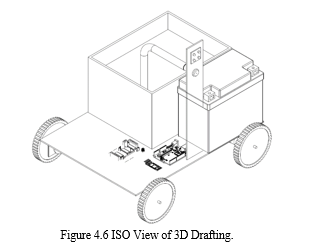
A mechanical frame constructed from mild steel angle bars will serve as the foundation of our robot. At each corner of the frame, wheels will be securely attached, akin to those found on four-wheelers, utilizing dummy wheel holders for stability. To facilitate ground movement, two DC motors equipped with an L293D Motor Driver and a Bluetooth module HC-05 will be affixed to the back wheels, enabling wireless operation in forward, reverse, right, and left directions.
Control over the robot's movement will be achieved through a serial monitor Bluetooth terminal application, downloadable from the Play Store onto an Android cell phone. Commands for movement are as follows:
- Forward: Both DC motors rotate clockwise.
- Reverse: Both DC motors rotate anti-clockwise.
- Left: Only the right motor rotates clockwise, facilitating a left turn.
- Right: Only the left motor rotates clockwise, facilitating a right turn.
- Stop: Command to halt the robot's movement.
C. Spraying construction
The spraying mechanism consists of a mechanical frame equipped with a storage tank mounted on top. Inside the tank, a mini-hydro motor is installed and connected to a tube with an end-type spraying nozzle. Additionally, a TCS3200 Colour sensor is integrated into the system. The color sensor analyzes the hue of the plant leaf and triggers the hydro motor based on a timer circuit programmed within the Arduino Uno Micro-controller. The coding parameters are as follows:
- For green leaves, the motor activates for 5 seconds.
- For yellow leaves, the motor activates for 10 seconds.
- For brown leaves, the motor activates for 15 seconds.
Adjusting the spraying duration for yellow and brown leaves aims to enhance plant health and growth under specific spraying conditions.
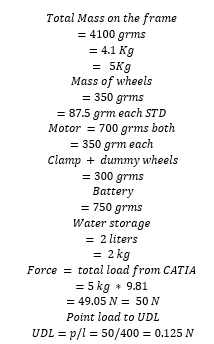
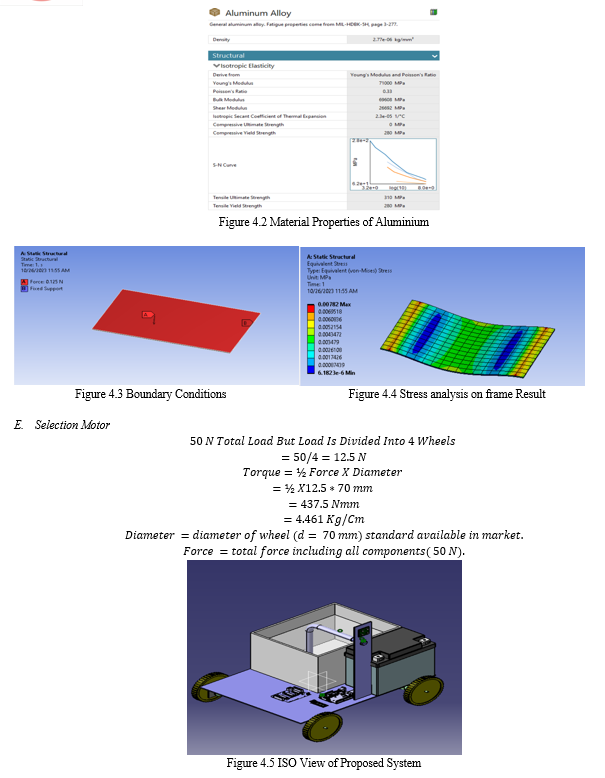
D. Design & Analysis
Conclusion
Additionally, the robot possesses the capability to adapt its spraying patterns and select appropriate chemicals based on specific color cues it detects. This feature ensures precise treatment application in optimal quantities. Such precision not only conserves resources but also mitigates the environmental footprint of agricultural practices. Furthermore, the color decoding system enhances crop health and growth by enabling customized nutrient or fertilizer application tailored to the color-coded requirements of distinct plant areas. By aligning its actions with the crops\' specific needs, the robot facilitates higher yields and enhances crop quality.
References
[1] “Agricultural robots for field operations: Concepts and components” Avital Bechar, Clement Vigneault Institute of Agricultural Engineering, Agricultural Research Organization, The Volcani Center, Bet-Dagan, Israel [2] “AGRICULTURAL ROBOT” Kavita Zole1, Sanghasevak Gedam2, Aditya Dawale3, Kiran Nikose4, Jayant Hande Research Student, Dept. of ETC, Priyadarshini J L College of Engineering Nagpur, Maharashtra, India [3] “HRI usability evaluation of interaction modes for a teleoperated agricultural robotic sprayer” George Adamidis, Christos Katsanos, Yisrael Parmet, Georgios Christou, Michalis Xeons, Thanasis Hadzilacos, Yael Edan [4] https://wholesale.krushikendra.com/Hectare_Fertilizer_Spreader [5] “Development of Smart Pesticide Spraying Robot” by Pvr Chaitanya, Dileep Kotte, A. Srinath, K. B. Kalyan [6] “Application of systematic methods in the electromechanical design of an agricultural mobile robot” Rubens Andre Tabile, Eduardo Paciencia Godoy, Giovana Tripoloni Tangerino, Arthur José Vieira Porto, Ricardo Yassushi. Inamasu, Rafael Vieira de Sousa [7] “Autonomous Pesticide Spraying Robot for use in a Greenhouse by Philip J. Sammons, Tomonari Furukawa and Andrew Bulgin [8] “Colour sensors and their applications based on real-time colour image segmentation for cyber physical systems” by Neal N. Xiong, Yang Shen, Kangye Yang, Changhoon Lee and Chunxue Wu
Copyright
Copyright © 2024 Rushikesh Waghmare, Vaibhav Bhalekar, Sumit Gaikwad, Shreyas Sutar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60478
Publish Date : 2024-04-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online