

Ijraset Journal For Research in Applied Science and Engineering Technology
IOT Based Distance Measuring Robot
Authors: Mr. Arjun Ray, Mr. Debabrata Sarkhel, Mr. Sujan Banerjee , Mrs. Priyanka Dutta, Mr. Kailash Bauri
DOI Link: https://doi.org/10.22214/ijraset.2024.65224
Certificate: View Certificate
Abstract
The paper describes the development of a distance measurement system that uses ultrasonic waves and is interfaced with a microcontroller module ATmega328P and the ATMega 16U2 Processor. We know that the human audible range is 20 Hz to 20 kHz. We can use these frequency range waves with an ultrasonic sensor. The advantages of this sensor are that when it is connected to an Arduino, which is a control and sensing system, a pro per distance measurement can be done using new methodologies. As vast sums of money are spent on hundreds of inflexible circuit boards, the Arduino will enable businesses to introduce many more unique items. This distance measurement system has a wide range of industrial applications, including range meters and proximity detectors. The ultrasonic sensor\'s hardware is interfaced with the Arduino. This method of measurement is an effective way to accurately measure small distances. The distance between an obstruction and the sensor is measured using an ultrasonic sensor. After knowing the speed of sound, the distance can be computed. In this project, The Bluetooth sensor receives a code from the Arduino app, and the Arduino operates in accordance with the code. Additionally, an ultrasonic sensor is utilized, which transmits an ultrasonic wave towards the object. When the ultrasonic wave returns after hitting the item, the transmitter detects the obstacle\'s distance and displays it on the LCD in centimeters. Using the ESP32 camera module, the user may log in to a specific IP address and see the object from a remote location while also controlling the robot.
Introduction
I. INTRODUCTION
Robotics has been a crucial part of the manufacturing industry since the mid-twentieth century and continues to advance. The next significant challenge for robotics is to develop applications for home and personal usage, which will require closer connection between robots and humans. Research in robots has prioritized social learning for many reasons. Commercial interest in constructing robots for everyday usage in homes, offices, hospitals, and museums relies on social learning to adjust systems to specific contexts and user preferences. Artificial intelligence research has focused on social learning as a way to construct robots that can acquire new knowledge and become more complicated without human intervention. Researchers use machine learning models to better understand social learning in animals, including humans.
Robots can be categorized based on the type of environment they work in (Fig. 1).
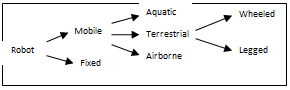
Fig 1: Classification of robots by environment and mechanism of interaction.
Presently one of the scientific study areas that are growing the fastest is mobile robots. Mobile robots have the ability to replace humans in many different industries. Distance to collision for robot manipulators is important for determining the viability of a robot configuration or defining safe robot movements in uncertain situations. However, distance estimation is a time-consuming process, and the sensors used to measure the distance are always noisy. There is a hurdle in estimating the predicted distance to collision for better robot control and planning.
The purpose of this study is to construct an Arduino-interfaced ultrasonic wave-based distance measurement system. Human hearing is known to vary from 20 Hz to 20 kHz. We may make use of these frequency range waves by using the ultrasonic sensor. The benefits of this sensor include the ability to measure a pro per distance using novel methods when interfaced with an Arduino, a control and sensing system.
II. LITERATURE REVIEW
Jinshan Wang et.al introduces an integrated mobile robotic measurement system for the accurate and automatic 3D measurement of large-scale components with complex curved surfaces. The measurement system is composed of a mobile manipulator, a fringe projection scanner and a stereo vision system, and it can provide accurate noncontact 3D measurements of large-scale complex components[1]. Rui Wang et.al proposes a 6R robot closed-loop kinematic calibration method to improve absolute position accuracy with point and distance constraints though machine vision[2]. T.S. Lembono et. al have proposed a calibration method called SCALAR consisting of calibration setup that requires a flat plate with two small holes drilled at a given distance apart and a sharp tool-tip attached to the robot's flange to calibrate both the kinematic characteristics of a 6-DoF robot and the extrinsic parameters of a 2-D laser range finder (LRF) mounted on the robot's flange[3]. An active disturbance rejection control strategy is demonstrated in practice to increase the Meca500's route accuracy has been suggested by Tarek A. Khaled[4]. To accomplish the dynamic path correction, a linear transducer (Renishaw's QC20-W ballbar) is used to measure the distance between a fixed point and the robot tooltip. The tooltip velocity vector is then fed to the robot (via Ethernet TCP/IP).
Nikhil Das and Michael C. Yip have proposed the use of Gaussian process (GP) regression and the forward kinematics (FK) to efficiently and accurately estimate distance to collision[5]. C. Sifferman et. al provide a calibration process that can accurately identify the posture of a single-pixel distance sensor using just the robot's known motion and an unknown planar target. They create a geometric link between the relative sensor position, robot motion, and an arbitrary plane, and we demonstrate that the plane and sensor parameters can be retrieved using nonlinear optimization[6].
III. METHODOLOGY AND MODEL SPECIFICATIONS
A. Methodology
In this project, we used a Bluetooth sensor to receive a signal from an Android app, which then controls the motor driver circuit to mobilize the robot based on the user's preferences via an Android app. The ultrasonic sensor installed at the top of the robot is used to measure distance, and the results are displayed in the LCD display. The result which is shown in the LCD display are also be shown in the web server of an ESP-32 cam.
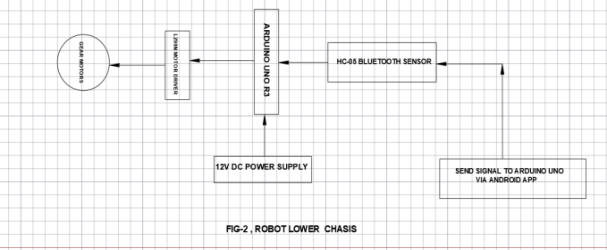
Fig 2. Block diagram of robot lower chassis
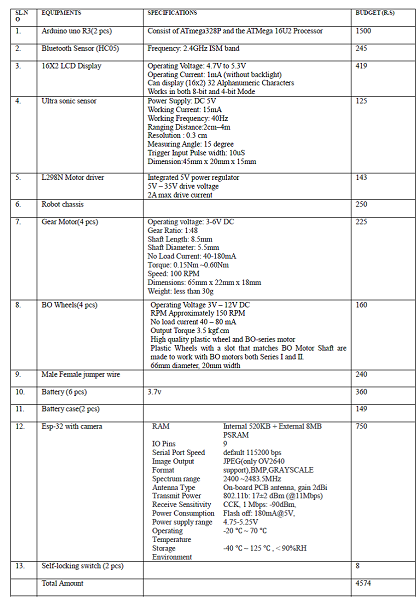
B. Equipment’s specifications
C. Hardware Model
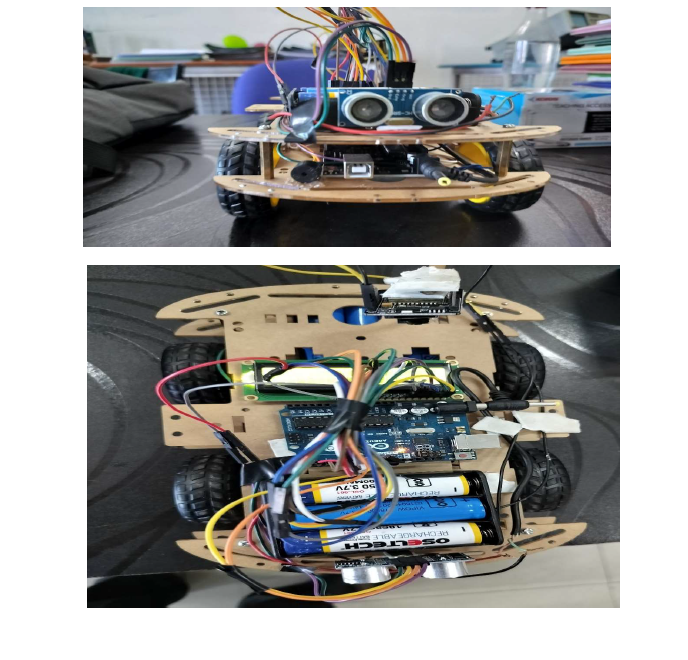
Fig 4: Hardware model structure.
IV. RESULT

Fig 5: LCD display showing the distance of the obstacle measured by the robot
A code is given to the Bluetooth sensor to the arduino app then as per the code the arduino will operate along with this an ultrasonic sensor is used which transmit an ultrasonic wave towards the object. Now when the ultrasonic wave returns after hitting the object then the transmitter will sense the distance of the obstacle and the LCD will display the distance in cm. By using ESP32 camera module the user can login into a particular IP address from where he can observe the distance of the object from the remote area and can also operate the robot.
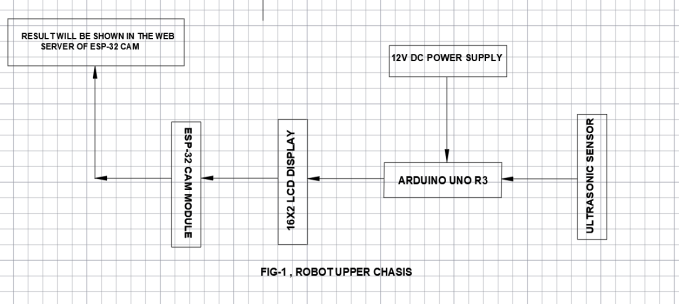
Fig 3. Block diagram of robot upper chassis
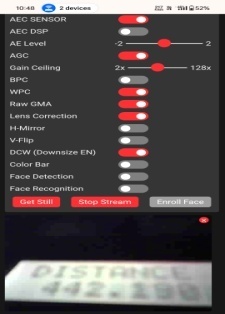
Fig 6: Result showing in the web server display.
Conclusion
In this paper, distance measurement using ultrasonic sensor and Arduino consists of a transmitter part of ultrasonic module units ultrasonic high frequency waves in the form of polices after collision of these wares with any object, these wares detected by microphone time taken by these wares from transmitter to receiver is used to measure distance from any object. We have selected an ultrasonic sensor module because it is initiated with a 10us pulse. The distance from any item is computed from. The human audible range can be used to accurately determine distances.
References
[1] Wang, Jinshan, Bo Tao, Zeyu Gong, Supu Yu, and Zhouping Yin. \"A mobile robotic measurement system for large-scale complex components based on optical scanning and visual tracking.\" Robotics and Computer-Integrated Manufacturing 67 (2021): 102010. [2] Wang, Rui, Anwen Wu, Xuan Chen, and Jun Wang. \"A point and distance constraint based 6R robot calibration method through machine vision.\" Robotics and Computer-Integrated Manufacturing 65 (2020): 101959. [3] T. S. Lembono, F. Suarez-Ruiz and Q. -C. Pham, \"SCALAR: Simultaneous Calibration of 2-D Laser and Robot Kinematic Parameters Using Planarity and Distance Constraints,\" in IEEE Transactions on Automation Science and Engineering, vol. 16, no. 4, pp. 1971-1979, Oct. 2019, doi: 10.1109/TASE.2019.2918141. [4] T. A. Khaled, O. Akhrif and I. A. Bonev, \"Dynamic Path Correction of an Industrial Robot Using a Distance Sensor and an ADRC Controller,\" in IEEE/ASME Transactions on Mechatronics, vol. 26, no. 3, pp. 1646-1656, June 2021, doi: 10.1109/TMECH.2020.3026994. [5] N. Das and M. C. Yip, \"Stochastic Modeling of Distance to Collision for Robot Manipulators,\" in IEEE Robotics and Automation Letters, vol. 6, no. 1, pp. 207-214, Jan. 2021, doi: 10.1109/LRA.2020.3032367. [6] C. Sifferman, D. Mehrotra, M. Gupta and M. Gleicher, \"Geometric Calibration of Single-Pixel Distance Sensors,\" in IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6598-6605, July 2022, doi: 10.1109/LRA.2022.3176453.
Copyright
Copyright © 2024 Mr. Arjun Ray, Mr. Debabrata Sarkhel, Mr. Sujan Banerjee , Mrs. Priyanka Dutta, Mr. Kailash Bauri. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET65224
Publish Date : 2024-11-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online