

Ijraset Journal For Research in Applied Science and Engineering Technology
IoT Based Farm Insect Killer
Authors: Ritika R Fusate, Divyanshu D Bhakta, Riya R Deoliya, Chandraj Y Behare
DOI Link: https://doi.org/10.22214/ijraset.2024.61164
Certificate: View Certificate
Abstract
In modern agriculture, the efficient and precise application of pesticides is essential for crop health and yield ptimization. To address this need, we present the development of an autonomous pesticide sprinkler robot designed for precision agriculture applications. The robot is equipped with a DTMF module for remote control and a motor driver to enable precise navigation and spraying operations. The system integrates a chassis with sturdy wheels for mobility, DC motors for propulsion, and a pesticide tank with a spraying mechanism for uniform distribution of pesticides over crops. The robot\'s control system is implemented using an Arduino board, programmed to interpret DTMF signals for remote operation and execute predefined spraying patterns with precision. Safety features such as emergency stop buttons and fail-safes are incorporated to mitigate potential hazards.
Introduction
I. INTRODUCTION
In the dynamic landscape of modern agriculture, the convergence of technology and traditional practices has become imperative for sustainable and efficient crop management. With a growing global population and increasing pressure on food production, there is a critical need for innovative solutions that enhance productivity while minimizing environmental impact. Our project aims to address this need by introducing an Autonomous Pesticide Sprinkler Robot, a groundbreaking advancement in precision agriculture. This robot represents a fusion of cutting-edge robotics, electronics, and agricultural science, offering a cost-effective and environmentally sustainable solution for pesticide application in farming practices.
II. AIMS & OBJECTIVES
- The project aims to deliver an efficient, cost-effective, and environmentally sustainable solution for pesticide application in agriculture.
- By integrating robotics, electronics, and precision control systems, the Autonomous Pesticide Sprinkler Robot is expected to enhance crop health, increase yields, and promote sustainable farming practices worldwide.
- The primary objective of our project is to design, develop, and implement an Autonomous Pesticide Sprinkler Robot for precision agriculture applications. This innovative robot aims to revolutionize traditional pesticide application methods by offering a more efficient, precise, and environmentally sustainable solution. Our key objectives include:
- Precision Pesticide Application: Develop a robot capable of autonomously navigating agricultural fields and applying pesticides with precision, ensuring optimal coverage and minimizing waste.
- Remote Operation and Control: Integrate a DTMF module for remote control, allowing farmers to operate the robot from a distance and adjust spraying patterns as needed, enhancing flexibility and convenience.
III. LITERATURE SURVEY
The literature survey for the proposed system, "Iot Based Farm Insect Killer" encompasses several key points:
- In 2020 Dr. Rajendra M. Rewatkar , Mr. Chaitanya A. Hedaoo , Mr. Sameer R. Buchake, Ms. Renu V. Jaypurkar, Ms. Shreya R. Bais, Ms. Prajakta S. Ghawde proposed monitoring scheme is to provide an early warning about possible intrusion. Authors have presented the IOT based insect detection and Protection of Crap using Raspberry pi and implemented a low-cost and efficient Surveillance System
- In 2021 Prof. Subhash Chandra Yadav, Prashant Kumar ,Pushpendra Kumar analyze the data using artificial intelligence particularly machine learning technique to predict the harmful insect The future work in this project is to collect the data for all the seasons and for the variety of crops grown in the field.
- In 2023 M.Gomathy Nayagam a, B. Vijayalakshmi a, K. Somasundaram b, M.A. Mukunthan c, C.A. Yogaraja a, P. Partheeban carry out the various tasks, the four levels of this system—crop management, pest identification and control, output activities, and input functional areas—are distributed among them. Agricultural production could be increased by combining sophisticated simulation with ICT. In the future, it should be simple to locate the plants in their natural surroundings.
IV. METHODOLOGY
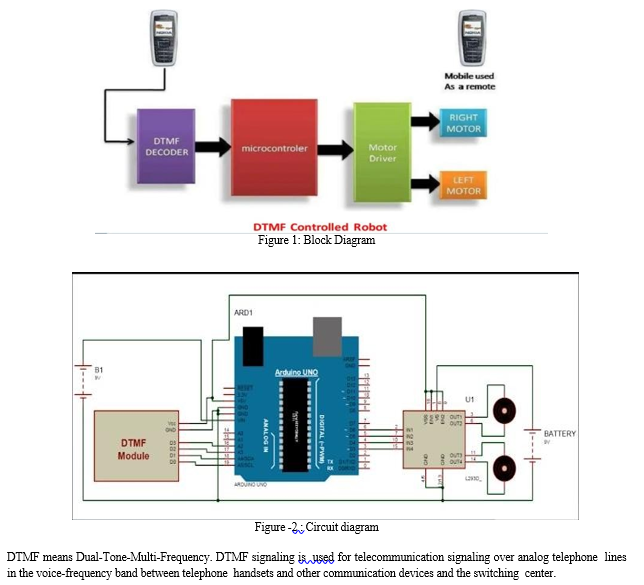
The technology used is dual tone multi frequency (DTMF). DTMF produced arduino signal of two tones from frequency of 697Hz to 1633Hz. The arrangement of keypad in DTMF is seen such that each row and Colum has its own corresponding frequency above figure is a representation of the typical DTMF keypad and the associated row and column frequencies. When any of the key from 1 to 9 including special symbols is pressed present in keypad particular code is transmitted. This code with two frequencies among which one is higher frequencies and second is lower frequencies.
First we make a call by using remote phone to received phone and then attend the call by manually or automatic answer code. Now, here this DTMF control robot is controlled by cellphone. When we press 2 by remote phone robot start to moving forward and moving continuously forward until next command comes. When we press ‘8’ by remote phone, robot c change his state and start moving inbackward direction until other command comes. When we press’4’robot get turn left till next command executed When we press ‘6’ robot turn to right and for stopping we press ‘5’. And when we press ‘#’pump turn on and for ‘9’ pump turn off. And Grass cutter machine turn on directly once we switch on power supply.
III. RESULTS
Looking ahead, further research and development efforts could focus on enhancing the robot's capabilities, such as incorporating advanced sensors for crop monitoring, integrating data analytics for decision support, and implementing autonomous navigation algorithms for optimized field coverage. In summary, the Autonomous Pesticide Sprinkler Robot represents a promising innovation in precision agriculture, offering a transformative solution for sustainable crop management and contributing to the advancement of modern farming practices. As we continue to explore the intersection of technology and agriculture, the potential for innovation and positive impact in the field of agriculture remains vast and exciting.
Conclusion
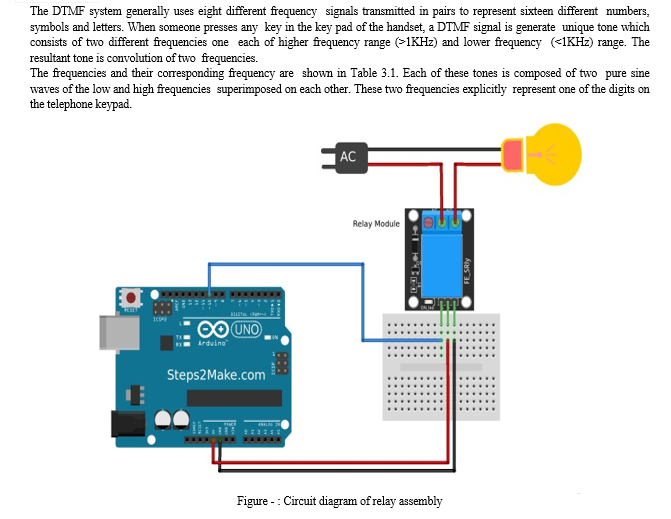
In conclusion, the development of the Autonomous Pesticide Sprinkler Robot represents a significant advancement in precision agriculture technology. Throughout this project, we have successfully achieved our objectives of designing, developing, and implementing a robotic system capable of autonomously navigating agricultural fields and accurately applying pesticides with precision and efficiency. By integrating innovative components such as the Arduino microcontroller, DTMF module, single-channel relay module, and 12V DC pump, we have created a versatile and adaptable platform that offers remote operation, precise pesticide application, and environmental sustainability. The use of a lithium-ion battery pack for power supply enhances the robot\'s mobility and reduces its environmental footprint, making it a sustainable solution for modern farming practices .
References
[1] Zhou, R.; Zhang, H.; Zhou, H.; Zheng, J.; Hu, H. Interaction effects of spray parameters on pesticide spray droplet drift. J. Drain. Irrig. Mach. Eng. 2019. [2] Kumar, A., Sarkar, S., & Pradhan, C. (2020). Recommendation System for Crop Identification and Pest Control Technique in Agriculture. 2020. [3] Vijayalakshmi, B., Ramkumar, C., Niveda, S., & Pandian, S. C. (2019). Smart Pest Control System in Agriculture. 2019. [4] S. Kumar, A. K. Sharma, S. S. Rawat, D. K. Jain, and S. Ghosh, “Use of pesticides in agriculture and livestock animals and its impact on environment of India,” Asian Journal of Environmental Science, 2013. [5] M. M. Rahaman, K. S. Islam, and M. Jahan, “Rice farmers’ knowledge of the risks of pesticide use in Bangladesh,” Journal of health & pollution, 2018. [6] I. Abbas, J. Liu, M. Faheem et al., “Different sensor based intelligent spraying systems in Agriculture,” Sensors and Actuators A: Physical, 2020. [7] V. Dhananjayan and B. Ravichandran, “Occupational health risk of farmers exposed to pesticides in agricultural activities, 2018. [8] Dai, F.; Yuan, H. Standardization of Plant Protection Machinery and Spraying Technology; China Agricultural Science and Technology Press: Beijing, China, 2002
Copyright
Copyright © 2024 Ritika R Fusate, Divyanshu D Bhakta, Riya R Deoliya, Chandraj Y Behare. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61164
Publish Date : 2024-04-28
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online