

Ijraset Journal For Research in Applied Science and Engineering Technology
IoT Based Pipe- inspection, and Cleaning Robot
Authors: Supriya Kamble, Shubham Kalamkar, Sahil Kurhade
DOI Link: https://doi.org/10.22214/ijraset.2024.58893
Certificate: View Certificate
Abstract
The \"IOT Based Pipeline Inspection and Cleaning Robot\" is a new addition to the infrastructure maintenance lineup! Pipelines are vital for moving necessary materials in the field of infrastructure maintenance. Our \"IOT-based pipeline inspection and cleaning robot\" is an inventive IoT-based rover outfitted with an ESP32 camera for real-time streaming and a motor propeller for effective exploration and operation. Its purpose is to improve maintenance procedures and tackle the difficulties associated with pipeline inspection. The major goal of the IOT-based pipeline cleaning and inspection robot is to transform pipeline maintenance by offering an adaptable, affordable, and successful solution. Real-time pipeline exploration and inspection are made possible by the rover\'s sophisticated features, which improve the infrastructure\'s functioning and integrity.
Introduction
I. INTRODUCTION
Pipe systems play a vital role in the transportation of liquids, gases, and other materials in industrial settings. However, over time, these pipes can become clogged or damaged less, maybe leading to reduced efficiency and sometimes even failure. Pipe inspection and also, cleaning is crucial for maintaining the smooth functioning of these systems. Traditionally, pipe inspection and also cleaning are done manually, which can be quite time-consuming, highly labor-intensive, and dangerous, especially in hazardous environments.
To overcome these challenges, the project "IOT Based Pipeline Inspection and Cleaning Robot aims to develop a robot that maybe can inspect and we also want to clean pipes with minimal human intervention. The robot has been designed to navigate through the pipe system, detecting obstacles, and then, cleaning the pipe walls using a maybe unique cleaning mechanism.
The project does provide an efficient and maybe, somewhat cost-effective solution for pipe inspection and cleaning in industrial settings, reducing human effort and ensuring safety.
A proposed design is there for a channel examination robot that could notice cracks in channels maybe internally with a low-cost video camera. As maintaining a defective channel might become more expensive and difficult, channel examination somewhat has grown in maybe importance.
The Hardware part consists of ESP832 Cam Wi-Fi controller Rover (for Front and Back Mechanism), Video Camera Module, and perhaps a Mobile Interface for live monitoring and controlling
The maintenance and cleaning of industrial pipes may be essential to somewhat ensure efficient and uninterrupted operations. However, manual inspection and cleaning of pipes can be time-consuming, hazardous, and somewhat expensive. To overcome these challenges, the proposed System is introduced this project aims to design and somewhat develop a robot that can autonomously inspect and, similarly, clean pipes without the need for human intervention.
II. MOTIVATION
The main motivation behind this Project The motivation behind this development of an IoT-based pipeline inspection and cleaning robot stems from the necessity to enhance safety, efficiency, and cost-effectiveness in pipeline maintenance. By automating these processes, the risk to human workers in hazardous environments is reduced tremendously. Real-time monitoring and data analytics enable more accurate and timely identification of pipeline issues, which is so crucial.
This approach not only saves costs through continuous operation and early detection of problems but also minimizes environmental impact by preventing any leaks or spills. The robot's remote operation capabilities and the data it generates, all support informed decision-making tremendously, allowing for optimized maintenance schedules and some improved compliance with regulatory requirements. In essence, this technology represents a comprehensive solution for addressing the challenges associated with pipeline management.
Hence, we are motivated to Design and develop a based Inspection and Cleaning Robot with certain Features as mentioned above.
III. LITERATURE SURVEY
All that has been performed in the articles that were evaluated is pipe inspection work. Our research has led to the development of innovative capabilities such as robot-assisted pipeline cleaning and live video streaming, which allows the operator to view real-time pipe footage from a distance and make the necessary modifications.
IV. PROBLEM STATEMENT
The drainage system of today is not automated. Therefore, it is challenging to pinpoint the precise location of any obstruction. We also don't receive early notice of the obstruction. As a result, finding and clearing the obstruction takes a long time. When all of the pipes are blocked, handling the problem becomes exceedingly inconvenient. People deal with a lot of issues as a result of these drainage line breakdowns.
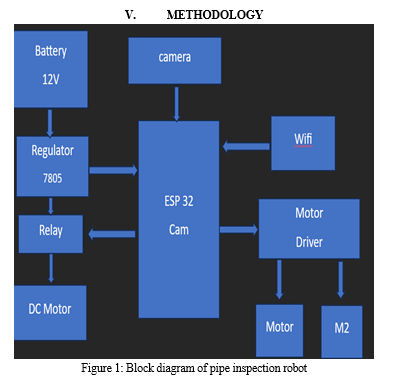
The core components of the proposed system are the ESP32 Cam, DC motor, relay, and motor driver.
The graphic depicts the block diagram for the pipe inspection robot that uses the Internet of Things. The robot is powered by a power supply via a motor driver that drives two direct current (DC) motors.
Any Android mobile device with internet (wifi) connectivity and an IP address can regulate the robot's movement and live video recordings.
Since it can be charged, we have been using a 12-volt acid battery to conduct wireless operations.
As the ESP32 cam controller required 5 volts, we used the 7805 voltage regulator. Then, for the live streaming, we were using Camera mode.
Next, the necessary data is retrieved from the web browser using the IP address after being monitored over WiFi on a live camera.
A development board that is frequently online is used to receive commands from a web interface to control a DC motor via a web browser.
We possess bi-directional motor control is possible when a DC motor is connected to the output of an H-bridge motor driver. Attach the motor driver to a development board that can process web requests.

VIII. OTHER SPECIFICATION
A. Advantages
- No Human is required for this Operation
- Large profits can be made by Owner
- Simple and efficient
- Compact Design
B. Disadvantages
- No Human is required for this Operation
- Large profits can be made by Owner
- Simple and efficient
- Compact Design
Conclusion
Inside pipe-network maintenance and repair are major tasks for robots. Certain pipes are engineered to accomplish particular functions with consistent diameters, while others have the ability to adjust their structural function in response to changes in the examined the pipe. This proposes an inside-the-pipe modular robots system. This robotic system\'s capacity to adapt to the inner diameter of the pipes is one of its main design objectives. The provided prototype allows the pipe inspection to be visualized using a smartphone camera.
References
[1] Fa-Shian Chang, Lih-Tyng Hwang, Chih-Feng Liu, Wei- Sheng Wang, Jeng-Nan Lee, Shun-Min Wang, Kai-Yi Cho, “Design of a pipeline inspection robot with belt driven ridged cone shaped skate model”, 2015 IEEE Conference on Robotics and Biomimetics, pp. 787–792, December 2015. [2] Jae Yeon Choi, Hoon Lim, and Byung-Ju Yi, “Semi-Automatic Pipeline Inspection Robot Systems”, SICE- ICASE2006. International Joint Conference, pp. 2266- 2269, Oct 2006. [3] Young-Sik Kwon, Jong Tae Suh, Byung-Ju Yi, \"A linkage type mechanical clutch synthesis is for pipeline inspection robot\", Automation Science and Engineering (CASE) 2012 IEEE International Conference on, pp. 618-623, 2012, ISSN 2161-8089. [4] Young-Sik Kwon, Bae Lee, In-Cheol Whang, Whee-kuk Kim, Byung-Ju Yi, \"A Flat Pipeline Inspection Robot with Two Wheel Chains\", 2011 IEEE International Conference on Robotics and Automation, pp. 5141-5146, May 2011. [5] Young-Sik Kwon, Byung-Ju Yi, \"Design and Motion Planning of a Two-Module Collaborative Indoor Pipeline Inspection Robot\", IEEE Transactions on Robotics, vol. 28, no.3, pp.681-696, June 2012.
Copyright
Copyright © 2024 Supriya Kamble, Shubham Kalamkar, Sahil Kurhade, Dr. Himanshu Chaurasiya. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58893
Publish Date : 2024-03-09
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online