

Ijraset Journal For Research in Applied Science and Engineering Technology
IOT- Based Potholes and Speed Breaker Detection
Authors: Sachin Rathod, Bhushan Date, Abhishek Wavhal, Prof. Dr. B. E. Shinde
DOI Link: https://doi.org/10.22214/ijraset.2024.64393
Certificate: View Certificate
Abstract
Due to the rise in automobiles, climate change, and population density, there are now an alarmingly large number of potholes in the world. Understanding the physical features of potholes and their surroundings, such as the surfaces they appear on, the size and depth of common potholes, and the kinds of wear and tear that might result in pothole formation, is usually necessary for their identification. It would also require familiarity with technologies like deep learning and machine learning techniques that are frequently used for pothole identification. Poor road conditions are one of the major causes for road accidents. Developing countries in particular are witnessing in- creased accident rates due to these poor road conditions. Potholes, deep ridges, missing pitches, improper speed breakers, poorly constructed manhole covers and slabs all combine to greatly increase the probability of serious accidents thus transforming roads into obstacle courses. In this study we have developed a model to detect unwanted potholes, deep ridges and speed breakers using computer vision and machine learning tools. We have developed a customized dataset (called Bumpy) that we use to train our machine learning algorithms. In this paper we propose a method where we use the Tensorflow pre-trained model to detect the potholes, deep ridges and speed breakers. Our experimental results demonstrate high accuracy although there are many obstacles on the road.
Introduction
I. INTRODUCTION
Roads have been an essential aspect of human society for thousands of years, serving as a crucial means of transportation. The construction and maintenance of roads can be traced back to 6000 BC, and the presence of well- developed roads has always been a sign of advanced civilization. With time, the
nature of roads has evolved, and our dependence on them has increased significantly. As a result, it is crucial to maintain roads effectively to prevent accidents and minimize transportation delays.
Due to infrastructure and resource limitations many developing countries suffer from poor road conditions. In turn poor road conditions are one of the major causes of accidents, property damages and sometimes loss of life. With increasing vehicular traffic many developing countries are witnessing increased accident rates. Potholes, deep ridges, missing pitches, improper speed breakers, poorly constructed manhole covers and slabs all combine to transform roads into obstacle courses thus greatly increasing the probability of serious accidents. The primary goal of utilizing yolov4 tiny and OpenCV for pothole detection is to automate the identification of potholes on roads through computer vision and deep learning techniques. The main objective is to create a fast and precise approach to pothole detection without manual involvement, which can decrease accidents and lower road maintenance expenses. To identify potholes and provide real-time alerts to the concerned authorities for maintenance and repair, the model will be pre- trained dataset. The goals of pothole detection using yolov4 tiny and OpenCV are to use computer vision and deep learning techniques to detect potholes in real-time from image or video inputs, achieve high accuracy and efficiency in detection, reduce manual intervention and costs associated with road maintenance, and prevent accidents by identifying potholes before they cause significant damage. By automating the detection process, our system has the potential to greatly improve road safety while reducing maintenance costs.
The high accuracy and speed of the proposed system make it a practical solution for real-world scenarios, allowing authorities to monitoring road conditions and identifying potential hazards
The scope of this project pothole detection is to create a pothole detection system that utilizes the YOLOv4 Tiny object detection algorithm and OpenCV for detection of potholes from a video stream or image. This system is designed to accurately identify potholes and draw bounding boxes around them, providing a means for government authorities to monitor road conditions and take appropriate measures to repair them. The system detects potholes in a quick and precise manner, eliminating the need for manual intervention. The automated detection can aid in reducing road maintenance costs and preventing accidents.
II. RELATED WORK
In the study, "A Deep Learning Approach for Pothole Detection using OpenCV," the authors proposed a pothole detection method using a deep learning approach based on convolutional neural networks (CNN) and OpenCV. The proposed method consisted of three stages: image pre- processing, feature extraction, and classification.
The experimental results indicated that the proposed method achieved high accuracy in detecting potholes.
The study, "A Pothole Detection and Classification System Using a Hybrid Approach," proposed a system for pothole detection and classification using a hybrid approach that combined edge detection, texture analysis, and support vector machines (SVM). The system was tested on real-world pothole images, and the experimental results demonstrated high accuracy in both pothole detection and classification.
A study was conducted on an automated pothole detection system that utilized computer vision techniques. The system included image pre- processing, pothole detection through a threshold- based approach, and pothole classification using machine learning techniques. The results of the experiments demonstrated that the proposed system successfully achieved high accuracy in both pothole detection and classification.
In their 2019 paper titled "Automated pothole detection using machine learning and image processing techniques," Waghmare et al. suggest a pothole detection system that combines image processing and machine learning techniques. The proposed system detects potholes from road images using image processing and then categorizes them into severity levels using machine learning algorithms.
In their 2019 paper titled "Automated pothole detection using smartphone sensors," Patil et al. suggest a pothole detection system that leverages smartphone sensors. The system utilizes the accelerometer and GPS sensors of a smartphone to detect potholes in real-time.
In their 2020 paper titled "Real-time pothole detection and tracking system using deep learning," Patil et al. propose a system for detecting and tracking potholes in real-time using deep learning techniques. The system uses a deep learning model to identify potholes from road images and subsequently tracks them in real-time with the help of object tracking algorithms.
In the article "Pothole detection using machine learning techniques and smartphones" authored by S. S. Jadhav et al. (2019), a novel pothole detection method is introduced. The proposed system utilizes the accelerometer and gyroscope sensors of a smartphone to capture road vibrations and detect potholes. Subsequently, machine learning algorithms are employed to categorize the potholes based on their level of severity.
III. PROPOSED SYSTEM
The proposed system for pothole detection using YOLOv4 Tiny and OpenCV is an algorithmic approach that utilizes deep learning and computer vision techniques. The system consists of two main components: the first component uses YOLOv4 Tiny, a state-of-the-art object detection algorithm, to identify potholes from the input images. The second component employs OpenCV, an open-source computer vision library, to further process and refine the detected potholes.
A. YOLOV4 TINY
YOLOv4-tiny is a real-time object detection model that is smaller and faster than the standard YOLOv4 model. It is based on a deep neural network architecture that uses a single convolutional neural network (CNN) to detect objects in images and videos.
Compared to YOLOv4, YOLOv4-tiny uses fewer layers and smaller filters in the CNN architecture, which reduces the model's complexity and makes it more efficient to run on devices with limited computational resources. However, this comes at the cost of slightly lower accuracy and the ability to detect smaller objects.
Despite its reduced size and complexity, YOLOv4- tiny is still a very capable object detection model, with state-of-the- art performance on several benchmark datasets. It is commonly used in applications that require real-time object detection, such as surveillance systems, autonomous vehicles, and robotics.
B. OPENCV
OpenCV (Open-Source Computer Vision) is a popular open-source library for computer vision programming. It was originally developed by Intel and later supported by Willow Garage and Itseez. OpenCV provides a wide range of tools and functions for image and video processing, including object detection, face recognition, camera calibration, feature detection and extraction, image filtering and transformation, and much more.
OpenCV is written in C++ and supports several programming languages, including Python, Java, and MATLAB. It is cross-platform and works on Windows, Linux, and macOS operating systems. OpenCV has a large community of developers and users, making it a popular choice for computer vision research and development. It is widely used in fields such as robotics, augmented reality, automotive safety, medical imaging, and security.
IV. IMPLEMENTATION
A. PRE-TRAINED YOLOV4-TINY
To use a YOLOv4 Tiny model for pothole detection, you would need to follow a few steps. Firstly, gather a dataset of pothole images and annotate them with bounding boxes using tools such as LabelImg or CVAT. Next, split the annotated dataset into training, validation, and testing sets. Then, download a pre-trained YOLOv4 Tiny model from a reliable source such as Darknet or GitHub, which should be pre-trained on a large dataset such as COCO. After that, fine-tune the pre-trained model on the pothole dataset using a deep learning framework such as TensorFlow or PyTorch. Train the model on the training set and validate it on the validation set to check its performance. Finally, test the fine-tuned model on the testing set to evaluate its effectiveness, and deploy the model to detect potholes in new images or videos.
B. PRE-PROCESSING
Data preprocessing is a critical step in the data mining process that involves manipulating, cleaning, and transforming raw data into a format suitable for analysis. In the case of using the YOLOv4 Tiny model for pothole detection,preprocessing involves preparing the images or videos to be fed into the model by resizing, normalizing, and arranging the pixel data in the correct format.
When using the YOLOv4 Tiny model for real- time pothole detection, the input data is automatically extracted from the live video stream captured by the camera. This data is then processed by the YOLOv4 Tiny model in real- time to detect potholes. By using a pre-trained model, we can save time and effort by avoiding the need to collect and label a large dataset of pothole images, which can be a time- consuming and expensive process.
C. OBJECT DETECTION
The process of object detection in pothole detection using YOLOv4 Tiny and OpenCV involves several steps. Firstly, you load the pre-trained YOLOv4 Tiny model and class labels, and configure the input and output layers of the model. Next, you process each frame of the input video stream by resizing, normalizing, and formatting the pixel data to feed it into the YOLOv4 Tiny model. The model then returns a list of bounding boxes, confidences, and class IDs that represent the location, probability, and type of objects detected in the image.
After receiving the outputs from the model, you apply post-processing techniques such as filtering out low-confidence detections, non-maximum suppression to eliminate overlapping detections, and drawing bounding boxes around the detected potholes.
The final output shows the location and size of the potholes detected in the input frame, allowing you to identify and track them in real-time.
D. POST-PROCESSING
After the object detection stage in pothole detection using YOLOv4 Tiny and OpenCV, the post- processing stage involves refining the outputs of the YOLOv4 Tiny model to obtain accurate and reliable pothole detections. It draw bounding boxes around the remaining pothole detections in the input image or video frame.
This step helps to visualize the location and extent of each detected pothole.
Overall, the post-processing stage plays a critical role in improving the accuracy and reliability of pothole detection using YOLOv4 Tiny and OpenCV. By refining the outputs of the YOLOv4 Tiny model, the post-processing stage ensures that the detected potholes can be effectively identified and addressed, leading to improved road safety and infrastructure maintenance.
E. VISUALIZATION
The visualization stage is crucial in pothole detection using YOLOv4 Tiny and OpenCV because it enables you to examine the pothole detections on the original video frames. This process is vital for evaluating the accuracy of the detections and ensuring that the algorithm is detecting potholes correctly.
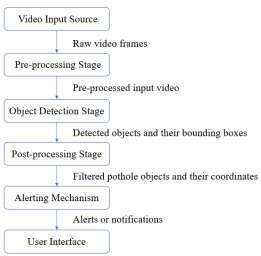
Fig 1 - System Overview
By visualizing the pothole detections, you can assess whether the algorithm is accurately identifying the potholes and annotating them with bounding boxes. Furthermore, you can confirm whether the algorithm is detecting all potholes in the video or missing any. This information can be used to refine the algorithm's accuracy by adjusting the model architecture, hyperparameters, or training data.
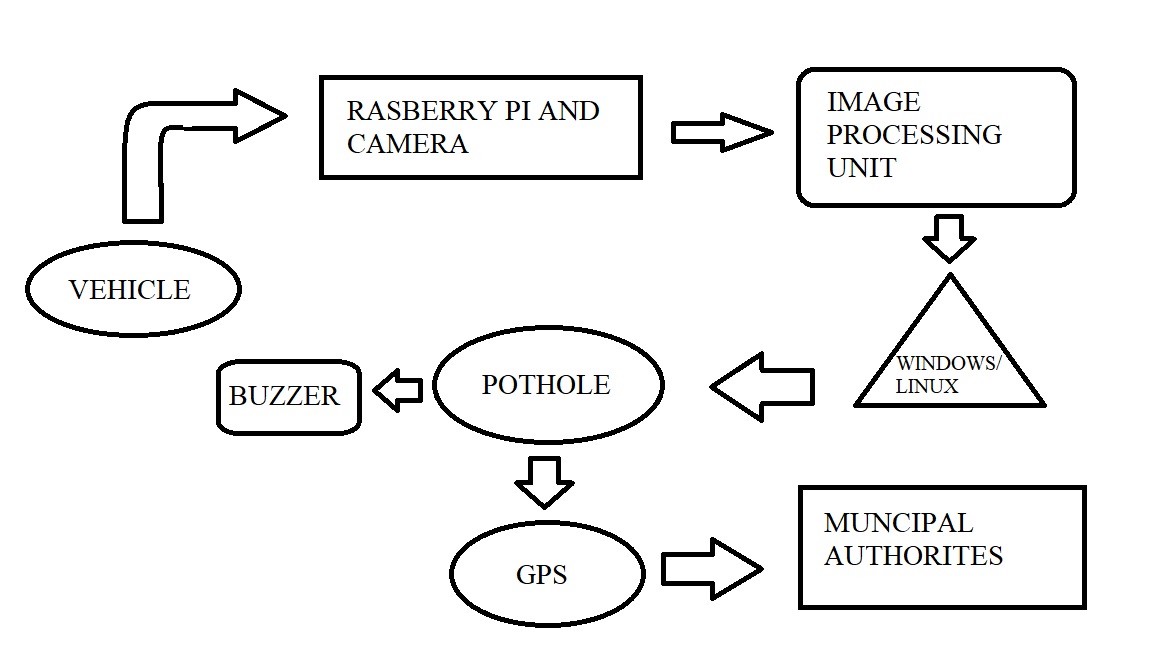 Fig 2 - System Flow
Fig 2 - System Flow
V. SUMMARY
In summary, YOLOv4 Tiny is a widely adopted option for object detection due to its combination of high accuracy and speed, making it ideal for real- time pothole detection applications. Nonetheless, a properly designed CNN model can also achieve high accuracy in pothole detection, particularly when the task demands more advanced image processing or feature extraction. Consequently, the decision to choose either model depends on the particular requirements of the application and the available resources.
Conclusion
To summarize, the integration of YOLOv4 Tiny and OpenCV offers a proficient and effective solution for pothole detection in various real-world scenarios. YOLOv4 Tiny is a robust object detection model that prioritizes both speed and accuracy, rendering it suitable for real-time applications such as pothole detection. OpenCV provides a comprehensive suite of image processing and computer vision tools that facilitate efficient preprocessing of input images and visualization of detected potholes. By combining these two technologies, we can quickly and accurately identify potholes in input images or videos, allowing for prompt maintenance and repair of damaged roads. The approach can be further refined by adjusting the model\'s hyperparameters or fine-tuning it on a specific dataset of pothole images. Overall, the use of YOLOv4 Tiny and OpenCV for pothole detection showcases the potential of deep learning and computer vision in addressing real- world problems, and emphasizes the significance of leveraging technology for infrastructure maintenance and safety.
References
[1] S. Hegde, H. V. Mekali and G. Varaprasad, \"Pothole detection and inter vehicular communication,\" 2014 IEEE International Conference on Vehicular Electronics and Safety, 2014, pp. 84-87, doi: 10.1109/ICVES.2014.7063729 [2] G. Singal, A. Goswami, S.Gupta,T choudhury “ PITFREE: Potholes Detection on Indian Roads Using Mobile sensors” IEEE 8th International Advance Computing Conference (IACC), 14th-15th dec. 2018. [3] S.Barnwal “ Vehicle Behavior analysis for uneven road surface detection” IEEE 18th International Conference on Intelligent Transportation Systems, 15th-18 Sep 2015. [4] Immanuel, R. R., & Sangeetha, S. K. B. (2023). Implementation of an Automatic EEG Feature Extraction with Gated Recurrent Neural Network for Emotion Recognition. In Computer Vision and Machine Intelligence Paradigms for SDGs: Select Proceedings of ICRTAC-CVMIP 2021 (pp. 133-150). Singapore: Springer Nature Singapore. [5] T. F. E. [Online], “Costs of poor road conditions,” Tech. Rep. [Online]. Available: https://thefinancialexpress.com.bd/public/views/ costs-of-poor-road-conditions-1545322604. [6] G. Nasr, E. Badr, and C. Joun, “Cross entropy error function in neural networks: Forecasting gasoline demand,” Proceedings of the Fifteenth International Florida Artificial Intelligence Research Society Conference, pp. 381–384, 2002. [7] A. Arab, K. Yu, J. Yi, and D. Song, “Motion planning for aggressive autonomous vehicle maneuvers,” in IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, Aug. 2016. [8] Pandey, A., & Singh, D. K. (2019). Real-time pothole detection and alert system using deep learning. In 2019 International Conference on Computer Communication and Informatics (ICCCI) (pp. 1-6). IEEE. [9] Tang, Q., & Li, Z. (2021). Pothole detection in road surface images using transfer learning and deep convolutional neural networks. Journal of Ambient Intelligence and Humanized Computing, 1-9 [10] Hassan, M. R., Ali, M. E., Hossain, M. J., & Shatabda, S. (2021). A comprehensive review of deep learning based pothole detection and classification systems. Journal of Intelligent & Fuzzy Systems, 1-17. [11] G. Nasr, E. Badr, and C. Joun, “Cross entropy error function in neural networks: Forecasting gasoline demand,” Proceedings of the Fifteenth International Florida Artificial Intelligence Research Society Conference, pp. 381–384, 2002.
Copyright
Copyright © 2024 Sachin Rathod A, Bhushan Date A, Abhishek Wavhal A, Prof. Dr. B. E. Shinde. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET64393
Publish Date : 2024-09-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online