

Ijraset Journal For Research in Applied Science and Engineering Technology
IoT Based Water Pollution Monitoring RC Boat
Authors: Atharv Laxman Metkari, Yukta Shrikant Lokwani , Dev Manoj Patel, Sushant Liladhar Patwe, Dr. Prof. Pankaj Agarkar
DOI Link: https://doi.org/10.22214/ijraset.2024.62135
Certificate: View Certificate
Abstract
As we all know that, water is life. And getting clean and pure water in our day-to-day life is becoming harder by the each passing day. Due the tremendous increase in pollution in water this is leading to poor health and unfulfilled need day to day needs of the mankind. Such increment in pollution of water is mainly seen in the rural areas. So, this particular project is aiming to find the solution for the increasing water pollution in different water bodies like lakes, ponds, etc. This project mainly contains the RC boat which will our inbuilt pollution detecting system. The main components of the system contain sensors like pH senor, and Turbidity senor, these sensors collect the value from the water bodies and send it to the thingspeak website. After that processing is being done on the collected data and it will monitor the pollution level in the water. By creating this system, it becomes easier for us to detect and monitor the amount of trash or pollution being present in any water body. And further my knowing this it will help in the prevention of polluted water as well as treating the polluted water.
Introduction
I. INTRODUCTION
Water pollution is a widespread global problem, posing a significant threat to the environment, human health and entire ecosystems. With rapid industrialization and urbanization, the problem of water pollution is getting worse, making it an urgent problem that requires immediate attention and action. The driving force behind the project “IoT-based Water Pollution Monitoring RC Boat” is to address these challenges by leveraging the power of Internet of Things (IoT) technology to develop an innovative and effective solution. to monitor water pollution in real time. The use of RC boats allows the system to easily cover large bodies of water, providing comprehensive surveillance coverage. Additionally, integrating IoT technology enables real-time data collection, which can play an important role in early detection of pollution events and rapid response. Furthermore, the project also aims to raise awareness about the importance of water quality monitoring and the role of technology in addressing environmental challenges.
II. LITERATURE REVIEW
- The Raspberry Pi3 Model is utilized for the online monitoring of water quality. This innovative approach is spearheaded by B KALPANA, an M. Tech student from the Department of Electronics at CVR College of Engineering, Hyderabad. The primary focus of this system is to monitor the pH and turbidity levels of water.
- The Automated Water Quality Monitoring Internet of Things (IoT) System for Small-scale Aquaculture Farms, authored by Aishwarya Menon and Prabhakar Menon from the Department of Computing REVA University in Bangalore, India, introduces a novel approach to monitoring water quality. The system utilizes an Arduino development board integrated with sensors to ensure cost- effectiveness. It operates in real-time, collecting data from designated areas of the pond at regular intervals. This data is then transmitted via the GSM module to the farmer's mobile phone, accompanied by alerts in case of any parameter deviations.
- In the paper called Water Quality Monitoring System Utilizing Internet of Things (IoT) Technology which is Authored by Vaishnavi Daigavane and Dr. M.Gaikwad from Department of Electronics & Telecommunication Engineering, MTech (VLSI), Bapurao Deshmukh College of Engineering, Sevagram, wardha_442102(M.S.). they mentioned the water quality monitoring system incorporates the capability to measure various parameters including temperature, pH level, turbidity, and flow sensor readings. These measurements obtained from the sensors are subsequently processed by the central controller unit.
- In this paper authored by A. Menon and M. Prabhakar at 8th International Conference on Computing for Sustainable Global Development, a novel IoT-based automated pond water quality monitoring system for aquaculture farms is presented. The system utilizes an Arduino development board and its sensors to achieve a real-time and cost-effective monitoring solution.
- The aim of this research by Mr. Aakash Adake, Dr. Manasi Dixit MTech in Electronics and Telecommunication Engineering, Professor in Department of Electronics Engineering, Kit’s College of Engineering, Kolhapur Maharashtra, India is to create a Water Quality Monitoring System using an RC boat that is connected to a Wireless Sensor Network. The system utilizes different wireless sensors such as Ph sensor, Turbidity sensor, water temperature sensor, air temperature sensor, and humidity sensor to continuously monitor the quality of water in real-time. The study explains how these sensors are integrated with the controller (raspberry pi 3) and how the data is transmitted to a cloud-based server (thingspeak). Furthermore, the system incorporates a camera to provide visual feedback for tracking the boat's location.
- The authors of this study, A.Prasad, K.. Mamun, F. Islam, and H. Haqva from the School of Engineering and Physics at the University of the South Pacific, Fiji Islands, have introduced a smart water quality monitoring system for Fiji. This system utilizes IoT and remote sensing technology to enhance water quality monitoring in the region.
- The research conducted by Soundarya Pappu, Prathyusha Vudatha, Niharika.V, Karthick.T, and Suresh Sankaranarayanan from the Department of Information Technology at SRM University, Kattankaluthur, focuses on an Intelligent IoT Based Water Quality Monitoring System. This system utilizes a PH sensor and TDS meter to measure water quality parameters related to hydrogen ion concentration and total dissolved solids. Moreover, the implementation of the K-Means clustering machine learning algorithm enables the prediction of water quality based on trained data sets obtained from various water samples.
- The intelligent system for monitoring water quality is designed to utilize real-time Internet of Things technology. This system, developed by Ali Ramadhan from the Department of Computer Techniques Engineering at the College of Technical Engineering, University of AlKafeel in Najaf, Iraq, enables remote monitoring and smart capabilities. It is capable of measuring various parameters such as water pH level, temperature, nitrate, chloride, dissolved oxygen concentration, turbidity, oxidation-reduction potential (ORP), conductivity or total dissolved solids (TDS), and sodium content.
- The real-time water quality monitoring system, enabled by the Internet of Things, was created by S. Geetha and S. Gouthami from the Department of Electrical and Electronics Engineering at Coimbatore Institute of Technology. The system is designed to test water samples and analyze the data uploaded over the Internet. Additionally, it is capable of alerting a remote user in the event of any deviation of water quality parameters from the pre-defined set of standard values.
- The Real-Time Water Quality Monitoring System was developed by Yashwanth Gowda K., Vishali C, Sumalatha S., and Spoorth G., under the guidance of N Ganeshan, Assistant Professor at Viswesvaraya Technological University, Belagavi, Karnataka, India. The system utilizes three sensors to measure crucial water parameters such as water pH level, water turbidity (cloudiness), and water temperature. These parameters are essential for average users to monitor as they provide valuable information about the quality of water in a container.
- In this study, by Varsha Lakshmikantha, Anjitha Hiriyannagowda, Aksh Manjunath, Aruna Patted, Jagadeesh Basavaia, Audre Arlene Anthony a Dept. of Electronics and Communication Engineering, Vidyavardhaka College of Engineering, Mysuru, India an extensive examination of recent advancements in the field of smart water pollution monitoring systems is provided. The research introduces a cost-effective and effective smart water quality monitoring system based on IoT technology for quality monitoring.
- In this research paper, the authors present a smart water quality monitoring system that utilizes IoT technology to achieve cost-effectiveness. The system incorporates multiple sensors to accurately measure important parameters including pH value, water turbidity, water level in the tank, as well as temperature and humidity of the surrounding environment. To ensure efficient monitoring, the collected data is transmitted to the cloud through an IoT-based Think Speak application. This enables continuous monitoring and assessment of water quality, contributing to effective water resource management. The study was conducted by Sathish Pasika and Sai Gandla from the Department of Electronics and Communication Engineering at Chaitanya Bharathi Institute of Technology in Hyderabad, India.
- The utilization of wireless sensor networks (WSN) in monitoring water quality involves multiple sensor nodes equipped with networking capabilities. These monitoring systems can be established with a focus on cost- effectiveness, simple ad hoc installation, and easy maintenance and operation. By, Shruti Sridharan, International Journal of Advanced Research in Electronics and Communication Engineering.
- The innovative water quality monitoring system discussed in this study by Sathish Pasika, Sai Gandla Department of Electronics and Communication Engineering Chaitanya Bharathi Institute of Technology, Hyderabad (TS), India. incorporates a range of sensors designed to assess different factors including pH levels, water turbidity, water tank levels, as well as temperature and humidity in the environment. The data collected by these sensors is then transmitted to the cloud through the Internet of Things (IoT) technology.
- Authored by Shruti Sridharan, the research article titled "Water Quality Monitoring System Utilizing Wireless Sensor Network" was published in the International Journal of Advanced Research in Electronics and Communication Engineering in April 2014. The study focuses on the implementation of wireless sensor networks (WSNs) for monitoring water quality. The system consists of multiple sensor nodes that possess networking capabilities. The main objectives of this monitoring system are to ensure affordability, facilitate ad hoc installation, and provide ease of handling and maintenance.
- This approach is characterized by its time-consuming nature, inefficiency in terms of manpower utilization, and lack of cost-effectiveness. This paper is written by Mourvika Shirode, Monika Adaling, Jyoti Biradar, International Journal of Scientific Research in Computer Science, Engineering and Information Technology. Our implemented water quality measuring system, on the other hand, offers real-time monitoring of water quality using multiple sensors (one for each parameter: pH, conductivity, temperature, turbidity) to accurately assess the quality of water. Any deviation in the parameter values indicates the presence of pollutants. By employing this system, we can effectively monitor water pollution and ensure the provision of safe drinking water.
- The IOT-based system for monitoring water and soil quality, developed by R Kumar, a research scholar at Shri JJT University in Jhunjhunu, Rajasthan, has been reviewed in the International Journal of Mechanical Engineering and Technology. This innovative system ensures the constant surveillance of water assets and the quality of soil, enabling the detection and monitoring of contamination levels.
III. PROJECT DEFINITION AND SCOPE
A. Problem Statement
To design RC water pollution monitoring boat that records and transmits water quality data to an IOT server online to maintain the water clean.
B. Objectives
- Water Quality Assessment: Measure various water quality parameters such as pH levels, dissolved oxygen, turbidity, temperature, and chemical contaminants to assess the overall water quality.
- Real-time Monitoring: Provide real-time data collection and transmission capabilities to allow continuous monitoring of water quality.
- Remote Operation: Enable remote control of the boat to navigate it to different areas of the water body for data collection. Remote operation should include control via a mobile app or web interface.
- Data Logging: Store collected data in a centralized database or cloud platform for historical analysis and reporting. This allows for trend analysis and long-term monitoring.
- Sensor Calibration: Regularly calibrate and maintain sensors to ensure accurate and reliable data collection. Implement automated calibration routines when possible.
- Data Analysis: Implement data analysis algorithms to identify patterns, trends, and anomalies in water quality data. This can aid in predicting pollution events and making informed decisions.
- Documentation: Thoroughly document the project, including hardware and software designs, sensor calibration procedures, and user manuals for future reference and replication.
- Cost-effectiveness: Strive to develop a cost-effective monitoring solution that can be deployed widely to monitor water bodies of different sizes and types.
C. Scope
- Thinkspeak takes more time for uploading sensor data, in future we can use other iot platforms for managing our data
- Try to make it more cost efficient
- Use more advanced iot tools for our module
- Similar idea can be implemented in finding milk quality
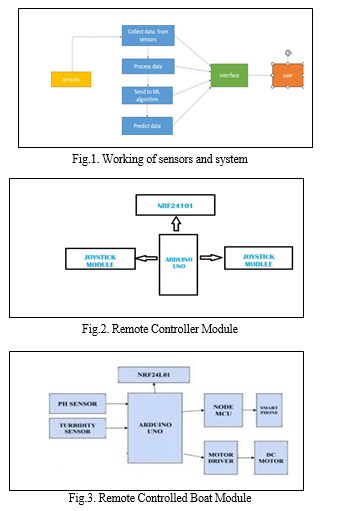
IV. WORKING OF SYSTEM
Therefore, the proposed system designs a solution to easily test the water quality of large water bodies. This RC water pollution monitoring boat can record and transmit water quality data to an online IOT server. This will continue to help us keep our water clean. This project is remotely operated and controlled by an RC remote that it can be controlled accordingly, a motorized propeller system to provide forward thrust and a servo motor to Provides rudder steering.
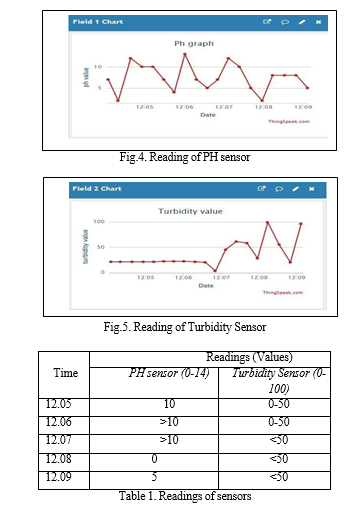
According to the command received by the RC receiver, the controller operates the DC motor that rotates the propeller through the bearing and flexible shaft. Currently we have 2 direction control rudders attached to a servo motor used to control the boat according to the received control signals. In this proposed system, we use two sensors to determine the water quality, we include a PH sensor as well as a turbidity sensor and a temperature sensor. These sensors will detect the presence of suspended particles in the water. We also have a transmitter and a receiver that will record the sensor data and stream it to the application via IOT at specific intervals. Therefore, remote-controlled water quality monitoring boats can be used to easily monitor the water quality of lakes and reservoirs. When we connect the system to the internet via WIFI or hotspot, the two sensors measure the values of both turbidity and ph and sends the data to the Thingspeak website. From the thingspeak website, we can view the readings in the graphical format. After applying formulas to the value, we can find the total pollution present in the water bodies. That same data can be fetched and showed from our android application with various other things.
V. METHODOLGIES
A. Project Planning and Definition
- Define the project scope, objectives, and goals.
- Identify the target water bodies or locations for monitoring.
- Create a project timeline with milestones and deadlines.
- Allocate resources, including personnel, budget, and materials.
B. Requirement Analysis
- Identify the specific water quality parameters to monitor (e.g., pH, dissolved oxygen, turbidity).
- Determine the required sensors and IoT hardware components.
- Define the range and accuracy of sensors.
- Specify the communication protocols and data transmission frequency.
C. Hardware Design and Assembly
- Select and procure the necessary hardware components, including sensors, microcontrollers, GPS modules, and communication modules.
- Design the physical structure of the RC boat, ensuring it is stable and waterproof.
- Integrate the sensors into the boat's structure, ensuring proper placement and protection.
- Implement power management and battery systems for extended operation.
D. Sensor Calibration
- Calibrate the sensors to ensure accurate and reliable data collection.
- Develop procedures for regular sensor calibration and maintenance
E. Testing and Validation
- Conduct bench testing of the boat's components to ensure they function correctly.
- Perform field tests in controlled water environments to validate sensor readings and boat operation.
- Adjust and fine-tune the system based on test results.
F. Data Analysis and Reporting
- Develop algorithms for data analysis to identify pollution events and trends.
- Implement an alerting system for exceeding predefined water quality thresholds.
- Generate reports and notifications for relevant stakeholders.
G. Deployment and Monitoring
- Deploy the IoT-based RC boat in the target water bodies.
- Monitor the boat's operation and data collection remotely.
- Ensure regular maintenance and battery replacement as needed.
H. Data Storage and Management
- Store collected data securely in a centralized database or cloud platform.
- Set up data management procedures for archiving and retrieval.
- Implement data backup and disaster recovery strategies.
I. Documentation and Knowledge Transfer -
- Document all aspects of the project, including hardware and software designs, calibration procedures, and user manuals.
- Transfer knowledge to relevant personnel for ongoing maintenance and operation
VI. RISK MANAGEMENT
A. Real-time Constraints
Description: The need for real-time data transmission and processing may pose challenges in optimizing the path, especially in large water bodies.
Management Strategy: Prioritize data transmission and processing speed in the algorithm design. Consider using edge computing to process data locally on the RC boat, reducing transmission latency.
B. Energy Consumption
Description: Path optimization should take into account the energy consumption of the RC boat to ensure it can complete its monitoring tasks without running out of power.
Management Strategy: Include energy consumption as a parameter in the optimization algorithm. Consider using energy-efficient sensors and communication modules. Plan for regular recharging or replacement of batteries.
C. Scalability Issues -
Description: As the water body size increases, the computational complexity of path optimization may become a challenge.
Management Strategy: Design the system to be modular and scalable. Consider dividing the water body into smaller sections and optimizing the path for each section independently.
D. External Factors -
Description: Environmental factors such as currents, tides, and weather conditions can affect the path optimization.
Management Strategy: Incorporate external factors into the optimization algorithm as dynamic constraints. Monitor real- time weather data and adjust the path accordingly.
VII. SOFTWARES
A. Microcontroller Platform
The microcontroller platform is the brain of the RC boat and controls the sensors, actuators, and communication modules. It should have sufficient processing power, memory, and I/O capabilities.
Choice: Arduino (e.g., Arduino Mega, Arduino Uno) or Raspberry Pi (e.g., Raspberry Pi 3, Raspberry Pi Zero)
B. Communication Protocol
The communication protocol defines how data is transmitted between the RC boat and the IoT platform. It should be reliable, secure, and suitable for the range of communication. Choice: Wi-Fi, LoRa, and cellular (e.g., 4G, 5G) are commonly used communication protocols. Wi-Fi is suitable for short-range communication, while LoRa and cellular are better for long-range communication.
C. Programming Language
The programming language will be used to develop the software for the microcontroller platform, the IoT platform, and the user interface.
Choice: C/C++ is commonly used for Arduino and embedded systems programming. Python is a good choice for Raspberry Pi and data processing on the IoT platform.
D. Database Management System
The database management system (DBMS) will be used for storing and managing the data collected by the RC boat.
Choice: Relational databases like MySQL are suitable for structured data storage.
E. Development Environment
The development environment will provide the tools and libraries required for software development, testing, and deployment.
Choice: Arduino IDE is a popular choice for Arduino development. PyCharm, or Atom can be used for Python development.
F. Version Control System -
The version control system will be used to manage and track changes to the software code.
Choice: Git is a widely used version control system and can be integrated with platforms like GitHub, GitLab, or Bitbucket for collaborative development.
VIII. HARDWARES
A. Arduino uno
Arduino Uno is the main brain of our boat module. The Arduino uno here is powered by an 9V battery. this 9V
Is distributed among all the sensors, esp8266 WIFI module. Arduino Uno collects the sensor data and then with the help of esp8266 wife module this data is passed to an iot platform called thinkspeak.
B. PH Sensor
PH sensor is one of the main sensor which we are using for calculating water pollution. The word pH means Potential of Hydrogen. The pure water has a ph of range 6.5 to 7.5. the pH value above 7.5 and below 6.5 is considered as non- drinkable. So the pH sensor which we have used in our project finds the pH value of water and then we compare this pH value of water with the standard pH value and then we get pH derived value. Which we will use in calculating overall pollution of water.
C. Turbidity Sensor
This sensor is also important in calculating water pollution. The Turbidity mean the cloudiness present in the water due to the suspended dirt particles. This Turbidity can also be seen using naked human eyes. The unit used to measure Turbidity is NTU. The Turbidity Sensor is used to calculate this cloudiness of water and then we compare this cloudiness of water with standard Turbidity value and then we get derived Turbidity value which we will use in calculating Pollution of water. Sensor is connected to the Arduino uno to send data to think speak platform
D. Joystick Module
The joysticks are the part of an controller which is used to control the directions and speed of our Rc boat.in our controller there will be two joysticks one will be used for directing boat to its destination and the other joystick will be used for controlling speed of the boat. Both these joysticks will get signals from NRF24 and send data to the boat. And the speed of motor will be changed as per users need and the direction can be change by sending commands to rudders which will change the direction of our boat
E. Propeller
It is the part of the boat which is used to move our boat in forward direction it is done with the help of and motor which is attach to this propeller when this dc motor gets signals from controller it starts to rotate and then due to the rotation of this motor propeller gets rotated and then water is pushed backward which makes our boat to move forward and as per the speed of motor propeller will push water backward and move in speed accordingly so we can attach two or more propeller for more high speed where each propeller is attached to one single DC motor.in our boat the speed of boat will be slow so that sensors can collect data from water properly so we are making use of only one Dc motor in our RC boat. And an small but hard material used propeller of around radius of 2.5 centimeters.
F. Battery
In our project we are going to use two batteries on for powering sensors and Arduino and one for powering boat. For this we are using an 9V HW company battery which will be directly connected to the Arduino board and then Arduino will distribute power as per need. For the distribution of power supply we are using master and slave technique using bread board.
G. Jumper Wires
Jumper Wires are the type of wires which are used to connect sensors and various other components in our project. We are making use of 3 types of jumper wires these are male to male, male to female, female to female. These jumper wires make it easy to attach and detach various components.
H. Transceiver
For sending data from sensors to think speak website we are using ESP8266 WIFI module it is an type of module which enables WIFI abilities to Arduino uno board. We connect with our personal WIFI to this Esp module and then this WIFI module sends the data from Arduino uno to our API think speak website.
I. DC Motor
We use these DC motors for making rotations in propellers. the speed of these Dc motors determines the speed of our RC boat
J. Servo Motor
These Servo Motors are used to change the direction of the Rudders attached to the Rc boat. The change in the Direction of these Rudders determines the direction of our Rc boat.
IX. FIGURES AND TABLE
X. CALCULATIONS AND FORMULAE
We can find derived Ph value, Turbidity Value by formula, PH derived =
(Measured ph – Standard ph / standard ph) *100
Turbidity Derived =
(Measured TB- standard TB/Standard Tb) *100
We can find the total Pollution of the water by the formula,
Pollution =
(PH derived% + TB derived% / 2) Where, Standard PH = 7.5
Standard Turbidity (TB) = 25
XI. ADVANTAGES
A. Real-time Monitoring
The IoT-based water pollution monitoring RC boat can provide real-time data on water quality parameters, such as pH, turbidity, dissolved oxygen, temperature, and more. This enables authorities and organizations to take immediate action if pollution levels exceed safe limits.
B. Remote access
The system allows for remote monitoring of water bodies, which can be particularly beneficial for large or hard-to-reach areas. This eliminates the need for manual data collection, saving time and resources.
C. Cost-effective
The IoT-based water pollution monitoring system can be a cost-effective solution compared to traditional water quality monitoring methods. It reduces the need for labor-intensive data collection and the costs associated with it.
D. Increased data Accuracy
The system can provide more accurate and reliable data compared to manual data collection methods. This is because the sensors used in the system are highly sensitive and can detect even minute changes in water quality parameters.
E. Early warning system -
The IoT-based water pollution monitoring RC boat can be programmed to send alerts when pollution levels exceed predefined thresholds. This can help authorities take preventive measures and mitigate the impact of pollution on aquatic ecosystems.
XII. LIMITATIONS
A. Limited Sensor Capabilities
The accuracy of the water quality measurements depends on the sensors used in the system. Some sensors may have limited sensitivity or accuracy, leading to potential discrepancies in the data collected.
B. Power Constraints
The boat relies on batteries for power, and the duration of the monitoring mission may be limited by the battery life. Frequent recharging or battery replacement may be necessary, which could limit the boat's ability to conduct long-term monitoring.
C. Data Transmission Limitations
The boat's ability to transmit data depends on the strength and reliability of the communication network (e.g., Wi-Fi, cellular) in the area. If the boat is in a remote location with limited network coverage, data transmission may be delayed or interrupted.
D. Operational Challenges
The boat may face operational challenges in adverse weather conditions, such as strong winds or heavy rainfall. Additionally, navigating the boat through narrow or shallow waterways may be difficult.
E. Maintenance Requirements
The boat and its sensors may require regular maintenance to ensure they function correctly. This can be time-consuming and may require specialized knowledge.
'XIII. APPLICATIONS
- Monitoring lakes, rivers, and ponds to assess the impact of industrial discharges, agricultural runoff, and urban pollution on water quality.
- Protecting and monitoring the water sources used for drinking water supply to ensure that contaminants are detected early and treated appropriately.
- Preserving and protecting natural ecosystems by monitoring the health of wetlands, estuaries, and marine environments.
- Assisting water treatment facilities in monitoring raw water quality before the treatment process to optimize treatment strategies.
- Providing real-time data during environmental disasters such as oil spills, chemical spills, or natural disasters to assess the extent of damage and plan cleanup efforts.
- Assisting industries in complying with environmental regulations by monitoring and reporting pollutant levels in nearby water bodies.
- Supporting municipal authorities in managing stormwater runoff and urban drainage systems to prevent contamination of local water bodies
References
[1] https://www.sciencedirect.com/science/article/pii/S 2666285X2100090X [2] https://www.ripublication.com/awmc17/awmcv10n 5_24.pdf [3] https://www.researchgate.net/publication/35385320 5_IoT_based_Smart_Water_Quality_Monitoring_Syst em [4] https://www.ijert.org/research/iot-based-water- monitoring-system-IJERTCONV5IS01114.pdf [5] https://ieeexplore.ieee.org/document/9641630 [6] https://nevonprojects.com/iot-water-pollution- monitor-rc-boat/ [7] https://www.researchgate.net/publication/33568248 6_Water_Quality_Monitoring_System_using_RC_Boa t_with_Wirel ess_Sensor_Network
Copyright
Copyright © 2024 Atharv Laxman Metkari, Yukta Shrikant Lokwani , Dev Manoj Patel, Sushant Liladhar Patwe, Dr. Prof. Pankaj Agarkar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62135
Publish Date : 2024-05-15
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online