

Ijraset Journal For Research in Applied Science and Engineering Technology
Survey Paper on IoT-Enabled Seed Dispensing Robot
Authors: Sakshi Chandekar, Prof. Dattatray Jadhav
DOI Link: https://doi.org/10.22214/ijraset.2024.65220
Certificate: View Certificate
Abstract
As a result, the IoT-Enabled Seed Dispensing Robot is used to automate the seed planting process with precision technologies. Based on real time environmental conditions such as soil moisture and temperature it optimizes seed placement through GPS tracking and IoT sensor data. Remote monitoring and control of the robot is via a cloud-based platform resulting in significant reduction in labour cost and superior farming efficiency. Having the ability to handle terrain and obstacle mapping, it is well suited for any agricultural application and is a reliable, scalable way to meet the challenges of modern farming.
Introduction
I. INTRODUCTION
It is true that agriculture still plays a very important role in feeding the world, but traditional seed planting techniques are labour intensive, and often operate with insufficient precision to optimize yield and resource efficiency. As food production demands rise, so too does the need to meet productivity and sustainability improvements in agricultural practices. The IoT enabled Seed Dispensing Robot is an innovation in the solving of the seed planting process with IoT sensors, GPS technology and terrain mapping. This robot was designed to address inefficiencies in conventional seeding methods by optimizing placement of the seeds, the spacing between seeds, and the depth of planting to be done in real time based on environmental parameters such as soil moisture and temperature, in order to make sure that seeds are planted under the best conditions and to promote healthier crop growth while avoiding wasting resources. The robot also integrates terrain mapping using LiDAR, allowing the robot to be precisely navigated through various field conditions, such as changes in elevation or surface irregularities, with GPS tracking and IoT connectivity. Due to its adaptability, the robot can create an adjustable field map, detect obstacle, and still deliver consistent performance in a wide variety of agricultural landscapes. This cloud connectivity makes the system even more powerful with remote monitoring and control, so that farmers will be able to track progress in real time, analyse field data and change planting parameters if necessary. Data storage derived from post planting analysis helps farmers find ways to improve their planting strategies over time through data driven insights while supporting the cloud-based storage. The robot effectively maintains labour costs through the reduction of reliance on manual labour and continuous monitoring, while decreasing planting delays and makes an agricultural process more efficient and reliable. The IoT Enabled Seed Dispensing Robot as a whole represents the progression toward precision agriculture, driven by precision in how food is grown, and data driven decision making to increase productivity and sustainability. Addressing labour shortages and improving planting accuracy in a scalable manner, this multi-sensory robot features GPS guided navigation, terrain mapping and cloud connectivity for timely seed placement over a variety of challenging landscapes.
II. METHODOLOGY
The methodology for the IoT-Enabled Seed Dispensing Robot is divided into several phases: Requirement analysis, System architecture, hardware and software implementation, data processing.
A. Requirement Gathering
In the first phase, the most important functional requirements required in seeding automation process is identified first. A user-centered approach is adopted, focusing on:
- Autonomous Navigation: GPS helps the robot circle through the fields and track accurately the position.
- Real-Time Environmental Data Collection: To monitor real time sensor data of seed placement we would need sensors like soil moisture and temperature sensors.
- Terrain Mapping: Obstacle detection and field condition adaptation are improved by LiDAR terrain mapping.
- Cloud Connectivity: The system must be a cloud-based monitoring and control system with a remote access to real time data as well as performance analytics.
B. System Architecture
The architecture consists of three primary components: microcontroller integration, hardware setup, cloud platform. The system works in client-server mode and data are transmitted from IoT sensors to the cloud storage.
- Hardware Setup: Other additions will join the physical setup of soil moisture sensor (YL-69) and temperature (DHT22) and LiDAR sensor (RPLIDAR A2) and main microcontroller (Arduino Uno) and GPS (NEO-6M) for navigation. Motor process the wheels and the seed discharging mechanism using the L298N and the data extracted from the evaluation board can be sent to cloud using a Wi-Fi module (ESP8266).
- Microcontroller Integration: The real time sensor processing, real time obstacle detection, and real time navigation (in addition to real time seed dispensing) is done on an Arduino Uno. For autonomous navigating, it makes use of the GPS data and with the ability of obstacle detection by the LiDAR sensor it changes as the terrain changes around it.
- Cloud Platform: In the field sensor data is sent to the cloud for real time use of field information and robot status. The robot is remotely accessible by the farmers who can adjust parameters needed by the robot.
C. Data processing and control
The robot utilizes multiple algorithms to ensure efficient navigation and seeding:
- GPS-Based Navigation: Feeding the robot’s path across the field into algorithms, means uses GPS coordinates to plot the path in the field.
- Terrain Mapping: LiDAR data, if created from a map, allows the robot to be able to see its surroundings, and thus to detect obstacles and then navigate around them.
- Sensor-Driven Decision Making: Seed depth and spacing are fixed according to planting conditions optimized by reading soil temperature and moisture and optimizing them for reducing accumulated unnecessary costs.
D. Flowchart
The workflow of the IoT-enabled Seed Dispensing Robot follows a systematic approach to ensure efficient and accurate seed planting based on real-time data and sensor inputs:
- Start: The robot turns on and goes to work.
- Sensor Collects Data: Next, to determine whether conditions are right to plant, the robot feeds the environmental data that it has sensed of itself … soil moisture, for example, into a sort of decision system.
- Sends Data to Cloud: Instead of the data staying on the device, it is sent to a cloud server for analysis and remote monitoring and decision making.
- Cloud Analyses: Sensor data is processed by the cloud platform to discover whether present environmental conditions, especially soil moisture, are suitable for planting.
- Moisture Optimal?: If the soil moisture level is strong enough for seeding, this is a decision block. If yes, then with the moisture to optimal levels, the robot is guided to the planting location using GPS. Else, it will skip planting this location if the moisture is not optimal, and moves on to the next site.
- GPS Navigation to Location: GPS coordinates are given for the robot to direct it to the said place.
- Maintain Direction Using IMU: An Inertial Measurement Unit (IMU) is then used by the robot to maintain a useable stable and accurate heading for the planting site.
- Detect Obstacles Using LiDAR and Ultrasonic Sensors: Among these robots we find robots equipped with LiDAR and ultrasonic sensors which in turn let them 'scan' the environment and tell whether they have obstructions on their path.
- Obstacle Detected?: This decision block determines the presence of an obstacle on the robot’s path. If an obstacle is detected, we will change the path of the robot in order to be safe. Else, the robot does not go anywhere directly; it goes to the planting location only when the robot detects no obstacle.
- Plant Seed: When it gets to the predetermined site, the robot puts a seed to the soil.
- Update Cloud Data: Once planted, the robot sends information on what it does and where it is to the cloud for real time tracking.
- More Locations?: This decision block examines next if there are more available planting locations in the robot’s schedule. If yes, for larger quantities of locations, the robot performs the workflow for the next site, following that if more locations exist. Else, the robot ceases operation when no more locations remain.
- Stop: Once the robot has finished all assigned planting locations it completes its task.
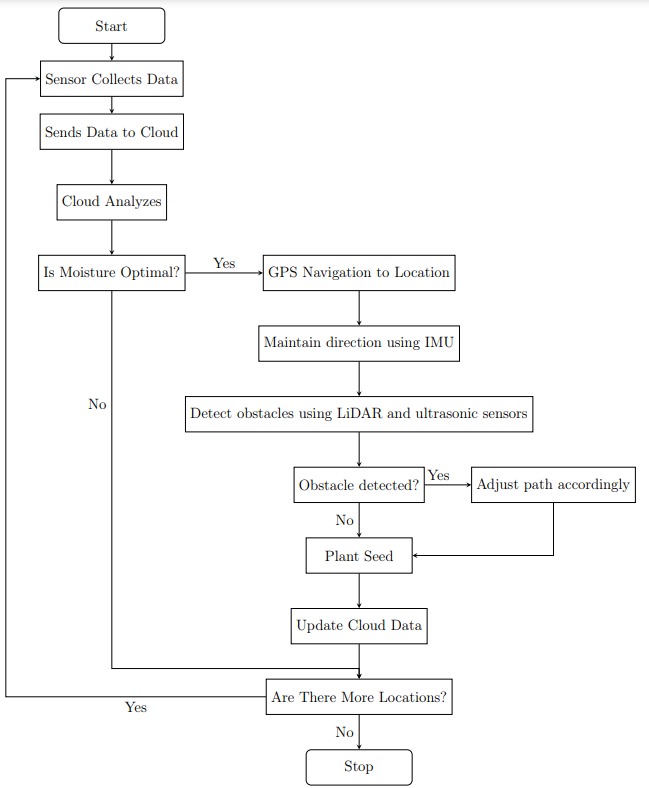
Fig. 1 Flowchart
Conclusion
Finally, the IoT–Enabled Seed Dispensing Robot shows that IoT when powered with GPS and real time environmental data is the perfect way to bring automation and improvement over modern agriculture’s seeding process. With this technology, we tackle some of the inefficiencies of traditional farming practice such as low labour costs and improved seed placement. Our technology integrates with cloud-based monitoring and their adaptability to environmental changes, which enables it to contribute to higher productivity and resource management. Now in recent times with the agriculture industry evolving the role of the automation solutions like this robot can play an important part in fulfilling the world’s food demands.
References
[1] V. Singh, S. Sharma, and P. Singh, \"Design and Implementation of Agrobot by Using IoT\", ResearchGate, 2020. [2] N. Kawale, S. Jagdale, and M. Bhangale, \"Seed Sowing Robot Using IoT\", International Research Journal of Modernization in Engineering Technology and Science (IRJMETS), 2020. [3] P. Kshirsagar, \"IoT Based Smart Agriculture and Automatic Seed Sowing Robot\", ResearchGate, 2020. [4] S. K. A. P. Vidushini and S. Abishek M., \"IoT Based Seed Sowing Robot\", International Research Journal of Engineering and Technology (IRJET), 2021. [5] M. Ghorpade, V. Jedhe, and P. Halake, \"Design and Fabrication of Automatic Seed Sowing Machine Using IoT\", International Journal of Research and Analytical Reviews (IJRAR), 2023.
Copyright
Copyright © 2024 Sakshi Chandekar, Prof. Dattatray Jadhav. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET65220
Publish Date : 2024-11-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online