

Ijraset Journal For Research in Applied Science and Engineering Technology
iSight - Navigable Path Detection for Visually Impaired using Semantic Segmentation
Authors: A Mohammed Musharaff, Ghazala Shameem Begum, P Raghavendra Rao, Sachith Naik R K, Dr. Mallikarjuna A
DOI Link: https://doi.org/10.22214/ijraset.2024.61896
Certificate: View Certificate
Abstract
This project introduces a new educational service that uses machine learning algorithms in Python and the OpenCV library to detect and prevent tampering, providing blind people with better freedom and personal security. Thanks to the integration of real-time detection equipment, the system can identify various hazards in different locations without using conventional equipment. Topics covered include optimizing algorithms for immediate use and maximizing efficiency for portable devices. Python supports rapid development, while OpenCV\'s modularity enables scalable development. This approach performs existing processes accurately, quickly and efficiently, using flexible methods for continuous improvement. Future developments include the integration of advanced learning models and user insights to provide more accurate feedback and pave the way for new products.
Introduction
I. INTRODUCTION
Navigation aids for the visually impaired are important for improving mobility and improving independence. Traditional assistive devices such as canes and hearing and sensory training dogs often have difficulty adapting to the dynamic and challenging environment of the city because they rely on proximity or specialized training. These challenges are compounded by changing urban layouts, unforeseen problems, and the difficulty of keeping up with rapid technology. Statistics show that more than 285 million people worldwide live with visual impairment, and 39 million of them are blind.
They often face navigational problems that interfere with daily activities, indicating an urgent need for new solutions. problems. While they provide improvements, they are often bulky, expensive, and limited in their ability to adapt to new obstacles or environments because they rely on physical hardware. The difference between affordability, flexibility and performance requires a new approach. Our toolset solves these problems by using machine learning algorithms, the OpenCV library, and Python programming to create more powerful and smarter tools. Adaptability. The system uses curated datasets to train machine learning models to detect obstacles such as steps, sidewalks, street furniture and moving vehicles. It then processes the data obtained from the depth camera, analyzes the problems using the OpenCV library, and provides real-time feedback to the user by listening to the ears. This software-based method provides fast response time and does not require expensive or bulky hardware. Python's versatile programming environment enables rapid design and scalability, while OpenCV's modular structure supports future development.
The system's modular architecture supports continuous updates through new product search models and user interface improvements such as custom navigation prompts or augmented reality prompts. The findings clearly show that it has the potential to be an effective replacement for existing equipment. Future developments include information distribution to improve product knowledge across multiple domains, integrating advanced learning models to increase accuracy, and enhancing the user interface for greater feedback. This system represents a revolution in providing smarter services to the visually impaired community.
II. LITERATURE REVIEW
|
SL.NO |
Title |
Author(s) & Citation
|
Findings |
|
[1] |
Internet of Things (IoT) Enabled Smart Navigation Aid for Visually Impaired |
Prates, M.O.R., Avelar, P.H. & Lamb, L.C. Assessing gender bias in machine translation: a case study with Google Translate. Neural Comput & Applic 32, 6363–6381 (2020). |
This article introduces smart navigation programs based on the Internet of Things, designed to improve modern navigation capabilities of visually impaired people. The system uses IoT-based sensing to identify problems and guide users through haptic or auditory feedback. By using interactive devices and sending information in real time, the system increases accuracy and efficiency. It has been shown to be beneficial for users' freedom and safety in everyday environments. |
|
[2] |
A Systematic Review of Urban Navigation Systems for Visually Impaired People |
El-taher, F.E.-z.; Taha, A.; Courtney, J.; Mckeever, S. A Systematic Review of Urban Navigation Systems for Visually Impaired People. Sensors 2021, 21, 3103. |
This systematic review provides an in-depth review of current assistive technology and research designed for visually impaired people walking outdoors. This review examines existing technologies and their limitations by breaking down navigation into specific phases and functions. Key points identified include the need for greater accuracy in the region, improved planning and robust problem detection. This review provides suggestions for future research on solutions that better meet user needs, especially in complex and changing urban areas. |
|
[3] |
Review of Navigation Assistive Tools and Technologies for the Visually Impaired |
Messaoudi, M.D.; Menelas, B.-A.J.; Mcheick, H. Review of Navigation Assistive Tools and Technologies for the Visually Impaired. Sensors 2022, 22, 7888. |
This review provides a comprehensive overview of indoor and outdoor equipment, focusing on placement technology and practical strategies. The authors classified different types of technology aids, such as GPS-based systems and wearable devices, and evaluated their effectiveness in real-world conditions. The review highlights the importance of location accuracy, instant data processing, and user feedback to improve mobility. It also identifies the need for more robust data collection, a user-centered interface, and a design model tailored to different environments. |
|
[4] |
Obstacle Detection System for Navigation Assistance of Visually Impaired People Based on Deep Learning Techniques |
Said, Y.; Atri, M.; Albahar, M.A.; Ben Atitallah, A.; Alsariera, Y.A. Obstacle Detection System for Navigation Assistance of Visually Impaired People Based on Deep Learning Techniques. Sensors 2023, 23, 5262. |
This article describes a navigation service that uses deep learning techniques and neural architecture to identify obstacles for the visually impaired. This approach aims to create fast and efficient models that can instantly process visual data. The authors use the best search methods to increase the accuracy and speed of detection of urban problems. Their results demonstrate the effectiveness of deep learning techniques in improving navigation services, providing reliable and adaptable services in many areas. |
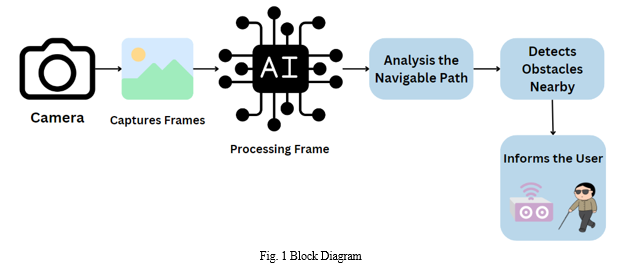
III. METHODOLOGY
To develop comprehensive services for the visually impaired, we adopted a method that includes product design, data collection, design, hardware integration, software optimization, prototype testing and further development. This ensures that the final device not only sounds great, but can also be tuned to the user's specific needs. Our goal is to create a mobile, efficient and user-friendly solution that improves the blind's sense of freedom and safety in many places by carefully planning and executing each step.
A. Product Conceptualization and Design Purpose:
- Use product search to identify functional and design needs for portable devices that will assist visually impaired users.
- Components:
- Includes a camera for instant photo capture.
- A unit that can run machine learning algorithms.
- An input that communicates with the user, such as audio output.
B. Objective data collection:
- Collect diverse image and video datasets representing a variety of problems and environments to train detection models.
- Resources: Use publicly available information and conduct interviews to shed light on various types of issues and problems in the environment that will use the device.
C. Model selection and construction:
- Machine learning model: First choose the machine learning model that suits the search purpose, such as the YOLO model.
- Customization: Adjust and modify this data collection model, focusing on accuracy and ability to complete on time.
D. Hardware Integration:
- Integrated camera: The integrated camera provides sufficient resolution and frame rate for real-time video capture without sacrificing performance.
- Recommendations: Create feedback strategies that use music to alert users to visual issues and provide information about the type and imminence of those issues.
E. Software Development:
- Algorithm implementation: Use machine learning algorithms in the device's software framework to process input from the camera and extract navigation clues.
- Optimization: Optimize the software to run efficiently on the hardware platform to ensure low latency and power consumption.
F. Prototype Testing Objective:
- The model has been tested in controlled and realistic scenarios to evaluate its effectiveness in observing obstacles and aiding navigation.
- User testing: Conduct tests with blind volunteers to gather feedback on the device's usability, performance, and overall user experience.
G. Iterative Improvement:
- Integration guide: Analyze user feedback and performance data to improve the device.
- Performance measurement: Continually improve machine learning models and hardware configurations based on test results to increase reliability and user satisfaction.
IV. RESULTS AND DISCUSSIONS
The project successfully integrated advanced machine learning and real-time image processing to create a portable, user-friendly navigation aid for the visually impaired. The tool increases user safety and independence by providing clear and intuitive information using state-of-the-art search algorithms. Feedback from test users is important to complete the work of the device to be transferred to the real site. Future improvements may include more real-time and advanced predictive analytics to support more recommendations. Overall, the project sets a new standard for service technology and demonstrates the enormous impact that combining technology with user-friendly design can have on blind people.

A. Navigational Aid Performance Results
YOLO's segmentation integration of object detection and path identification leads to an enhanced user experience designed for visually impaired users. Here are the important findings:
- The right way to find the truth: Semantic segmentation provides high accuracy in identifying and indicating navigable paths, separating safe and problematic areas. This development helps visually impaired users better understand and navigate their environment.
- Efficient object identification: The YOLO algorithm can be used to quickly and accurately identify static and moving objects in the client's environment. This ensures that users receive timely warning of dangers in advance.
- Dynamically adapts to the environment: The combination of these technologies allows the power to adapt to various environments and maintain high performance in both chaotic urban environments and various living environments.
B. Visualization of System Capabilities
The visual part of this study focuses on demonstrating the effectiveness and reliability of the combination of object detection and segmentation techniques. visual effects included:
- Segmented Road Layout: A visual representation of a road showing areas considered safe to walk on, with non-navigable areas clearly identified. This is important as it demonstrates the system's ability to effectively guide visually impaired users.
- Obstacles detected using YOLO: The results of detecting real objects are shown by drawing boxes around the detected objects, labeled with their classification (such as pedestrians, cars, street furniture). These visualizations are important to show how the system alerts users to problems.
- Real World Use: Performance techniques in different situations such as crowded streets, quiet neighborhoods and various weather conditions are described to ensure you find it powerful and versatile in real use.
Conclusion
The successful project enabled advanced machine learning and real-time image processing to revolutionize navigation services for the visually impaired and set a new standard in service technology. By integrating with state-of-the-art detection algorithms, the device provides accurate feedback, ensuring the user\'s safety and freedom. Feedback from multiple user trials is critical to developing tools to solve real-world problems. Going forward, the integration of augmented reality and predictive analytics can add value to the journey; This demonstrates continued commitment to innovation and may result in users using the established framework and continuing to provide visually impaired people with a better experience in their daily lives.
References
[1] Kim, In-Ju. \"Recent advancements in indoor electronic travel aids for the blind or visually impaired: a comprehensive review of technologies and implementations.\" Universal Access in the Information Society (2024): 1-21. [2] Kuribayashi, Masaki, et al. \"Pathfinder: Designing a map-less navigation system for blind people in unfamiliar buildings.\" Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems. 2023. [3] Yang, Anbang, et al. \"UNav: An infrastructure-independent vision-based navigation system for people with blindness and low vision.\" Sensors 22.22 (2022): 8894. [4] Bouteraa, Yassine. \"Design and development of a wearable assistive device integrating a fuzzy decision support system for blind and visually impaired people.\" Micromachines 12.9 (2021): 1082.
Copyright
Copyright © 2024 A Mohammed Musharaff, Ghazala Shameem Begum, P Raghavendra Rao, Sachith Naik R K, Dr. Mallikarjuna A. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61896
Publish Date : 2024-05-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online