

Ijraset Journal For Research in Applied Science and Engineering Technology
Intelligent Transport System for Lane Detection and Pothole Detection using YOLO
Authors: Supriya Agre, Aishwari DumbrePatil, Chaitanya Chaudhari, Raj Zite, Rohit Suryawanshi
DOI Link: https://doi.org/10.22214/ijraset.2024.64961
Certificate: View Certificate
Abstract
This paper aims to develop an automated system for pothole and lane marking detection on roads using the YOLOv4-tiny model with a supporting database. The traditional methods of detecting road conditions are slow and inefficient, as they are based on manual processing. With computer vision, our system will identify potholes and lanes much more quickly and accurately. The YOLOv4-tiny model is chosen because it provides a good balance between speed and accuracy, making it suitable for real-time applications. The database of images of roads with potholes and lanes will support training and testing of the models to achieve reliable detection. It is anticipated that this paper will be helpful in the improvement of road safety and maintenance as it will be able to provide timely information about road conditions.
Introduction
I. INTRODUCTION
Maintaining road safety is one of the most important aspects of public infrastructure. Potholes on roads and unclear lane markings are sources of accidents and disturbed traffic flow. The main challenge in road maintenance is quick and accurate detection of potholes and lane markings. Traditional methods in road inspection, primarily on manual processing or basic image analysis, have been found to be slow in several ways with heavy labor. Advances in recent artificial intelligence and computer vision technologies are in a position to make these tasks faster.
This paper aims to develop an automatic pothole and lane markings detection system using computer vision techniques. The system identifies and evaluates the condition of roads and lane boundaries by using a powerful, light-weight model such as YOLOv4-tiny in real-time. This is achieved through the training of the model using a dataset of different images of roads to recognize crack, potholes, and faded lane markings. Such a system, once designed, could assist road maintenance teams in offering timely, accurate data about road conditions, which could eventually mitigate hazards and enhance the quality of roads.
Essentially, this paper conceives an answer that would make it easier and quicker to handle the task of road monitoring by the application of artificial intelligence, which will facilitate the improvement of both road infrastructure management's safety as well as efficiency.
II. PROBLEM STATEMENT
Rough roads always lead to accidents, car damage, and injuries. Weather-related factors such as heavy rains, cold temperatures, traffic loads, and general wear are among the worst hazards that can lead to potholes, which pose significant risks to drivers. Faded or missing lane markings confuse one and increase the chances of collision. Most of this is still discovered through traditional methods of inspections that entail much time and labor. This dependence on manual methods often delays identification of defects on the roads, which allows conditions to degrade and hence compromise safety for all road users.
One of the growing needs, therefore, is an automatic system that can detect, in real time, both potholes and lane markings. The system shall then use advanced computer vision techniques to quickly analyze conditions on the road, making minimal dependence on manual checks. An automated detection process might be used that will deliver accurate and timely information concerning hazards on roads, thus contributing to the prompt identification of the problems. The paper tries to find out whether these automated detection methods can make the knowledge of road conditions better, which will lead to more safety and awareness for the drivers.
III. SCOPE AND OBJECTIVE
The scope of this paper focuses on developing an automated system to detect potholes and lane markings on roads with the help of computer vision techniques. This system uses the YOLOv4-tiny model in order to identify and classify these road conditions from images. The paper, in turn, aims to establish a reliable detection framework in well-structured annotated road images that can be implemented in different environments and conditions of roads.
The primary aim would be to increase the sensitivity and accuracy of pothole and lane marking detection. The system will thus be developed to operate real-time, thereby providing results in time for raising public awareness about possible road hazards. This is not actually a road maintenance paper. Information collected may be very helpful to the relevant stakeholder transportation agencies and even drivers in understanding their situation about the current road condition. Improving road safety will ultimately come from ensuring a tool will contribute to better monitoring and reporting of potholes and lane markings, that will develop a safer drive experience among all road users.
IV. LITERATURE REVIEW
|
Sr No |
Author Name |
Year |
Methology |
|
1 |
N. Bhavana , Mallikarjun M. Kodabagi, B. Muthu Kumar, P. Ajay, N. Muthukumaran, and A. Ahilan |
2024 |
YOLO, YOLOV5x |
|
2 |
Jie Li , Zhong Qu , Shi-Yan Wang , and Shu-Fang Xia |
2024 |
segmentationbased road damage detection |
|
3 |
Yachao Yuan,Md Saiful Islam, Yali Yuan", Shengjin Wang, Thar Baker, Lutz Maria Kolbe |
2021 |
Road segmentation techniques, Road damage detection techniques, Cloud/Edge computing systems |
|
4 |
Yuming Liu Xiaoyong Zhang Bingen Zhang Zhenwu Chen |
2020 |
Then we adopt the state of-the-art deep objective detection model including Faster-RCNN and YOLOv4 for completing detection |
V. METHODOLOGY
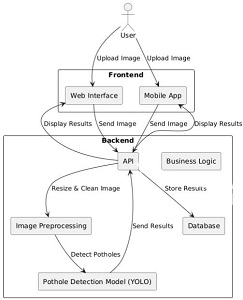
A. User Functionality
- Upload Image: Users can easily upload images of roads for analysis.
- View Results: Users can view detected potholes along with relevant metrics.
- Feedback Mechanism: Users can provide feedback on detection accuracy to improve the system.
B. Frontend Interface Layer
- User Interaction: The frontend enables intuitive navigation and interaction.
- Responsive Design: Adapts seamlessly across devices (web and mobile).
- Data Transmission: Effectively sends user-uploaded images to the backend for processing.
C. API Integration
- Central Access Point: Is the portal for all back-end capabilities.
- Component Coordination: Connect frontend, preprocessing, model and storage.
- Data Management: Coordinate data flows and ensures security in any communication between the components.
D. Image Preprocessing
- Image Cleaning: Cleanly removes noisy and artefacts to bring out the images.
- Resizing: Scales the images to an appropriate input dimension required in the YOLO model.
- Format Conversion: Converts them to image processing format.
E. YOLO Model Implementation
- Pothole Detection: Uses YOLO algorithm for the pothole detection process. This is done in real time.
- Model Training: It can train upon custom datasets or may take a pre-trained model to make use of them.
Conclusion
This paper focuses on designing an automated system for pothole and lane marking detection using the YOLOv4-tiny model. It would use good-quality, well-annotated road images to obtain early, on-time identification of road hazards and to, therefore, enhance road safety levels. Although the paper does not require maintenance, it has the ability to make transport agencies and drivers aware of road conditions. This aspect helps overcome the limitations of conventional manual inspections and contributes toward safer driving experiences by developing effective monitoring of road safety.
References
[1] Harvey, J., Al-Qadi, I.L., Ozer, H., and Flintsch, G. (Eds.) \"Pavement, Roadway, and Bridge Life Cycle Assessment 2020.\" Presented at the International Symposium on Pavement, Roadway, and Bridge Life Cycle Assessment 2020 (LCA 2020), Sacramento, California, USA, from June 3 to 6, 2020. Boca Raton, FL: CRC Press, 2020. [2] She, X., Hongwei, Z., Wang, Z., and Yan, J. \"A Feasibility Study on Measuring Asphalt Pavement Pothole Properties Using 3D Line Laser Technology.\" International Journal of Transportation Science and Technology, 2021, 10(1), pp. 83–92. [DOI reference] [3] Wang, H.W., Chen, C.H., Cheng, D.Y., Lin, C.H., and Lo, C.C. \"A Real-Time Approach for Pothole Detection in Intelligent Transportation Systems.\" Mathematical Problems in Engineering, 2015, Article ID: 869627. [DOI reference] [4] Li, W., Shen, Z., and Li, P. \"YOLO-Based Crack Detection for Track Plates.\" Presented at the 12th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, December 14-15, 2019, pp. 15-18. [5] Cord, A., and Chambon, S. \"Automatic Detection of Road Defects Using Textural Pattern Recognition with AdaBoost.\" Computer-Aided Civil and Infrastructure Engineering, 2012, 27, pp. 244–259. [DOI reference] [6] Cha, Y.J., Choi, W., Suh, G., Mahmoudkhani, S., and Büyüköztürk, O. \"Autonomous Visual Inspection for Structural Defects Using Region-Based Deep Learning Models.\" Computer-Aided Civil and Infrastructure Engineering, 2018, 33, pp. 731–747. [DOI reference] [7] Jahanshahi, M.R., Jazizadeh, F., Masri, S.F., and Becerik-Gerber, B. \"Unsupervised Autonomous Pavement Defect Detection and Quantification with Low-Cost Depth Sensors.\" Journal of Computing in Civil Engineering, 2013, 27, pp. 743–754. [DOI reference] [8] Luo, L., Feng, M.Q., Wu, J., and Leung, R.Y. \"Autonomous Pothole Detection Using a Deep Region-Based Convolutional Neural Network and Cloud Computing.\" Smart Structures and Systems, 2019, 24, pp. 745–757. [DOI reference] [9] Silva, L.A., Sanchez San Blas, H., Peral García, D., Sales Mendes, A., and Villarubia González, G. \"A Multi-Agent System Architecture for Pavement Monitoring and Pothole Recognition in UAV Images.\" Sensors, 2020, 20, Article ID: 6205. [DOI reference] [10] Fernandez-Llorca, D., Minguez, R.Q., Alonso, I.P., Lopez, C.F., Daza, I.G., Sotelo, M.Á., and Cordero, C.A. \"Assistive Intelligent Transportation Systems: Localizing Users and Identifying Disabilities Anonymously.\" IEEE Intelligent Transportation Systems Magazine, 2017, 9, pp. 25–40. [DOI reference]
Copyright
Copyright © 2024 Supriya Agre, Aishwari DumbrePatil, Chaitanya Chaudhari, Raj Zite, Rohit Suryawanshi. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET64961
Publish Date : 2024-11-03
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online