

Ijraset Journal For Research in Applied Science and Engineering Technology
Line Marking Robot with Chalk Dispenser
Authors: Swapna Raghunath, Sarla Rushmitha, Sri Vidya Reddy Kolan, Y Vasavi, Suhana Tabassum
DOI Link: https://doi.org/10.22214/ijraset.2024.61451
Certificate: View Certificate
Abstract
Line marking robot is an autonomous robot that marks lines in a desired way using the chalk powder in the chassis. The sophisticated combination of hardware and software components that make up the robot\'s operation demonstrates how the flexibility of Arduino, motor drivers\' control, and a chalk dispenser are all integrated. The robot is instructed to navigate the rover along the predetermined route that is already planned. The program to be dumped in the microcontroller is written in the Arduino IDE software. This helps the robot move forward, Backward, and turn 90 degrees to follow a course.
Introduction
I. INTRODUCTION
The method of marking lines in various fields, be it either in sports, construction or landscape, etc. is done traditionally that involves manual labour and handheld equipment such as rods, thread and chalk powder. This is a tedious task since it consumes much time and involves human labour. This method does not involve precision and accuracy. To overcome this problem of involved labour and less accuracy, a system that can automatically dispense chalk powder or paint with higher efficiency can be designed. This led to the development of the system “Line Marking Robot with automatic chalk dispenser”.
There were some solutions developed to this problem already. They were paint sprayers that worked, when manually the sprayer was on. This system included manual labour and the paint was also dispensing to the sides. It doesn’t work properly in marking a proper straight line. And the other system that was developed is semi-automatic line marking machines that involved manual labour to move the system from one place to another. Though it automatically dispenses the paint, due to the presence of human labour, it is not very efficient to be used. However, many other existing systems still require significant human intervention and lack the full automation and sophistication envisioned by the Line Marking Robot system.
The primary purpose of Line Marking Robot project is to streamline and enhance the line marking process. By developing a robotic system for line marking, the project aims to improve efficiency, accuracy, and consistency while reducing the time and effort required for line marking activities. Additionally, the project aims to increase safety by minimizing the need for human workers to operate potentially. A line marking robot is destined to follow the desired path that is already mentioned in the software program automatically, while simultaneously dispensing the chalk powder. It promotes a multidisciplinary approach that fosters the development of mechanical, electronic, electrical, and programming skills. The project's application spans from marking lines for sports to delineating lines for hospitals, roads, and more. Despite humans' intelligence, the limitations in efficiency and reliability have led to robots partially replacing human labour. This project aims to accomplish similar tasks in some capacity [1].
The advantages of line marking robot comprise labour savings, cost-efficiency efficiency, precision, accuracy and versatility. The main advantage that makes this system different from other systems is its versatility and cost-efficiency. The Line Marking Robot can be programmed to mark lines of various lengths, widths, and configurations, making it adaptable to different applications and environments. And its cost is less as compared to other existing systems.
II. COMPONENTS DESCRIPTION
A. L293D Motor Driver
A motor driver serves as a current-enhancing and switching device. Once integrated between the motor and microcontroller, it decodes input signals from the microcontroller and produces corresponding outputs to drive the motor.
The voltage at which the motor operates, known as supply voltage(Vss) , typically 6V for DC motors. The logical supply voltage determines the threshold for considering input voltages as high or low. For instance, with a logical supply voltage of +5V, input voltages ranging from -0.3V to 1.5V are taken as low, while 2.3V to 5V are deemed high.
The PWM-led speed control for the motor is facilitated by Enable 1 and Enable 2 pins. With two channels available, one channel is allocated for each motor.

E. Power Supply and Battery Snap
A power supply refers to a source of electrical energy. It can be a device or system that delivers electrical or other forms of energy to a load or multiple loads, known as a power supply unit (PSU). While the term is commonly associated with electrical energy sources, it can also pertain to mechanical or other types of energy supplies, albeit less frequently.
This system requires a 9V DC power supply to operate all electronic components involved in the project. For this specific project, we have opted to utilize a single 9V battery to fulfill this power requirement.
One of the simplest methods to power the DC LEDs is by utilizing a 9V battery, paired with convenient battery snaps. Illustrated in the accompanying photo, these snaps are specifically designed to attach snugly onto the terminal leads of any standard 9V battery. These battery snaps consist of two leads: a red wire designated as "positive" and a black wire marked as "negative". Similarly, our pre-wired LEDs are equipped with a red wire for positive connection and a black wire for negative connection.
F. Chassis
This robotic chassis contains of base with two gear motors, four compatible wheels and the motor driver, Arduino board and the chalk dispenser on its surface.
Wheel specification:
Width: 30mm
Diameter: 100mm
G. Jump Wire
A jumper wire is an electrical wire. It features a connector or pin at each end. Jumpers are commonly utilized to establish connections between components on a breadboard or within prototype circuits, eliminating the need for soldering. These wires can be inserted into designated slots on a breadboard, connected to the circuit boards header connector, or linked to test equipment for seamless interconnection within circuits.
III. WORKING PRINCIPLE
The operating of a line marking robot designed for chalk powder meting out involves a coordinated attempt amongst its numerous additives. Equipped with superior functions such as infrared sensors for correct route detection and a servo motor for controlled chalk dispensing, this robot machine combines mobility and precision to revolutionize line marking tactics.
The block diagram as shown in Fig1 for a line marking robot involves its hardware additives and the way they collaborate with each other. The Sensor plays a crucial position in detecting the presence and alignment of a line at the surface, enabling the robot to comply with a predefined route accurately. The coronary heart of the line marking robotic management unit lies inside the Arduino UNO, wherein Arduino UNO tactics the inputs from the sensors and orchestrates the line marking robotic movements.
Acting because of the coronary heart of the operation, this management unit plays a pivotal position in coordinating the numerous functionalities of the line marking robot. The Motor Control phase is chargeable for translating the processed instructions into physical movements. The Motor Driver factor takes the price of controlling the vehicles that pressure the wheels, whilst the DC Motors themselves propel the line marking robotic forward, facilitating its motion alongside the detailed route.
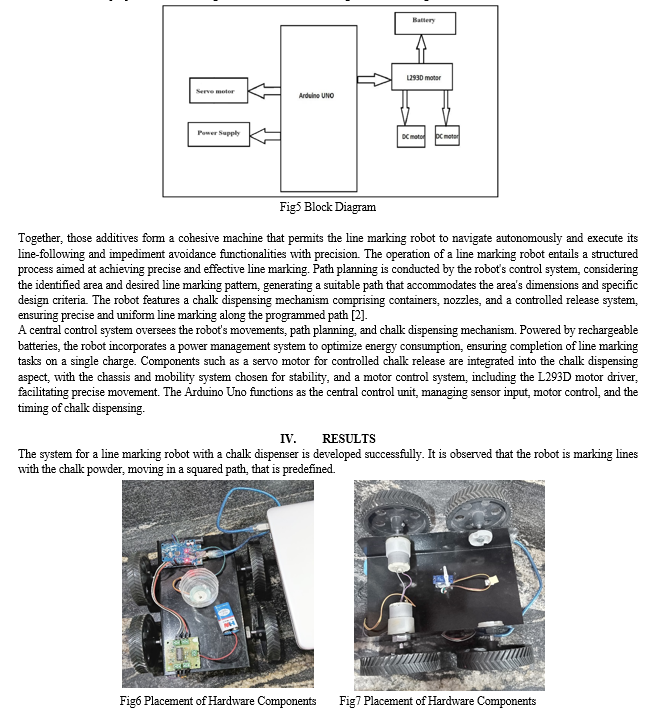
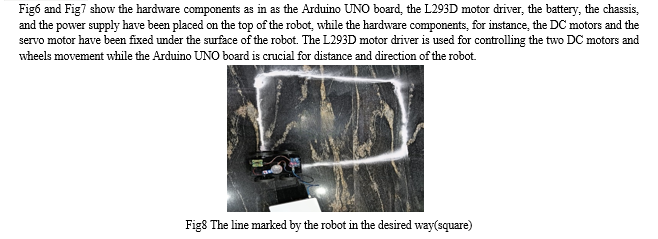
Fig8 shows that according to the instructions, the robot marks the line using the chalk powder in the chassis in the desired way.
The robot moves at a speed of 150Hertz (in PWM) from the designated point, dispensing chalk powder as it moves forward for 10 seconds. Upon reaching this time, it halts movement and powder dispensing, then turns right and stops. It repeats this process three times to achieve a precise square, moving forward and dispensing chalk for 10 seconds after each turn.
The potential results for the developed system encompass improved accuracy and efficiency, cost-efficient system, enhanced accuracy, environmental benefits. The line marking robot marks lines according to predefined specifications, ensuring that they are straight and aligned correctly, leading to significant time savings compared to manual methods.
One of the most important advantages of the system involve the capability of autonomy. The robot is capable of operating autonomously, without constant human supervision, once it has been programmed and set up. This leads to more precise line marking, reducing errors and improving the overall quality of marking. The price of the existing systems in the market are not user friendly, except those for large industries and organizations. This line marking robot with chalk dispenser is cost-efficient to a common mam, as compared to those of the existing products in the market. This system does not require extra components and human labor. As compared to those of the existing systems, this line marking system is environment friendly, since it didn’t use any fuel to run.
Conclusion
In Conclusion, the line marking robot emerges as a highly effective solution for various styles of line marking needs, be it on sports fields, roads, or other surfaces. Its ability to dispense chalk powder accurately and uniformly ensures clear and visible lines, offering an efficient alternative to traditional methods. Notably, the robot\'s precision surpasses human capabilities, delivering straight and even lines at a faster pace, while its versatility allows for the creation of custom designs. Ease of operation, minimal maintenance requirements, and cost-effectiveness further enhance its appeal across professional and amateur domains. Through real-time analysis and marking capabilities, it can streamline processes, minimize labor, and enhance accuracy. Integration with intelligent technologies like IoT, AI, and machine learning opens doors to even greater efficiency, precision, and adaptability, paving the way for transformative advancements. Above all, the automatic line marking robot stands poised to become the industry standard, offering efficiency, precision, and adaptability across various sectors, thus shaping the future landscape of industrial processes.
References
[1] K. K. A. A. Zell, \"Path following for an omnidirectional mobile robot based on model predictive control,\" in 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 2009. [2] A. Loria, J. Dasdemir and N. Alvarez Jarquin, Leader–Follower Formation and Tracking Control of Mobile Robots Along Straight Paths,\" in IEEE Transactions on Control Systems Technology, vol. 24, no. 2, pp. 727-732, March 2016, doi: 10.1109/TCST.2015.2437328. [3] R. C. A. A. Colorni, \"An effective and fast heuristic for the Dial-a-Ride problem,\" 4OR, vol. 5, no. April 2007, pp. 61-73, 2017. [4] [Online]. Available: https://www.arduino.cc/. [5] R. C. Luo, M. -H. Lin and R. S. Scherp, \"Dynamic multi-sensor data fusion system for intelligent robots,\" in IEEE Journal on Robotics and Automation, vol. 4, no. 4, pp. 386-396, Aug. 1988, doi: 10.1109/56.802. [6] M. A. H. Ali, W. A. B. W. Yusoff, Z. B. Hamedon, Z. B. M. Yussof and M. Mailah, \"Mechatronic design and development of an autonomous mobile robotics system for roadmarks painting,\" 2016 IEEE Industrial Electronics and Applications Conference (IEACon), Kota Kinabalu, Malaysia, 2016, pp. 336-341, doi: 10.1109/IEACON.2016.8067401.
Copyright
Copyright © 2024 Swapna Raghunath, Sarla Rushmitha, Sri Vidya Reddy Kolan, Y Vasavi, Suhana Tabassum. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61451
Publish Date : 2024-05-01
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online