

Ijraset Journal For Research in Applied Science and Engineering Technology
Machine Learning Algorithms For Pothole Detection: A Review
Authors: Ankit ., Gautam Yadav, Arya Kumar, Neerja Negi
DOI Link: https://doi.org/10.22214/ijraset.2024.61040
Certificate: View Certificate
Abstract
Potholes are a major problem for the condition of roads, car safety, and commuter comfort. Potholes must be found early and repaired quickly in order to preserve transportation networks and reduce related expenses. Advances in computer power and sensor technology have led to the emergence of machine learning algorithms as potent pothole detection methods. Modern machine learning methods used for pothole detecting tasks are thoroughly examined in this research study. Using a variety of datasets, we investigate and contrast the performance of many algorithms, such as ensemble techniques, support vector machines (SVMs), and convolutional neural networks (CNNs). The study explores the advantages and disadvantages of each strategy, including details on each one\'s memory, accuracy, precision, and computing efficiency. We also talk about the difficulties and potential paths for future study in this quickly developing topic.
Introduction
I. INTRODUCTION
Finding potholes is an essential part of maintaining and improving road infrastructure. Potholes have the ability to seriously harm cars, raising the expense of repairs and raising the risk of collisions. Conventional manual inspection techniques are labor-intensive, time-consuming, and prone to mistakes made by people. The subject of pothole identification has undergone a revolution because to the combination of machine learning algorithms with modern sensing technologies like accelerometers, cameras, and LiDAR.
Pothole detection tasks are a good fit for machine learning algorithms because of their exceptional capability in analysing and understanding complicated data patterns. These algorithms are able to identify holes in novel, unexplored contexts by generalising from labelled data. However, depending on the particular issue domain and dataset characteristics, various methods perform differently and are not always suitable.
The goal of this research study is to provide a thorough examination of many machine learning pothole detecting techniques.
Using a variety of datasets, we investigate and contrast the effectiveness of numerous cutting-edge approaches, such as ensemble methods, support vector machines (SVMs), and convolutional neural networks (CNNs). Our goal is to shed light on the advantages and disadvantages of each strategy so that practitioners and academics may choose the best algorithms for their pothole detecting applications
II. LITERATURE REVIEW
Due of the huge negative effects that potholes have on road infrastructure and vehicle safety as well as economics, pothole identification has attracted a lot of interest within the transportation research community. Automatic pothole detection systems were developed as a result of the labor-intensive, time-consuming, and human error-prone nature of traditional manual inspection techniques. This topic has been addressed with promising results in recent years via the combination of machine learning algorithms with sophisticated sensing technology.
Eriksson et al. [1] offered one of the first efforts in this field, proposing the "Pothole Patrol" system. In order to identify potholes based on vibration patterns, this system used a mobile sensor network of accelerometers installed on cars. Although this method showed that automated pothole identification was feasible, it was limited by predetermined criteria and could not adjust to different road conditions.
Convolutional neural networks (CNNs) have become an effective tool for image analysis applications, such as pothole identification, with the introduction of deep learning. In order to identify and locate potholes, Butt et al. [2] created a CNN-based system that used photos of the road surface taken by cameras placed on vehicles. Their method beat conventional computer vision methods and attained an amazing accuracy of 92%. Similarly, to show the value of visual data analysis, Nienaber et al. [3] used real-world film and basic image processing algorithms to identify potholes.
Researchers have investigated the use of 3D point cloud data obtained from LiDAR sensors in addition to optical data for pothole identification. A CNN for visual feature extraction, a support vector machine (SVM) for geometric analysis, and a Random Forest model for sensor data integration were all used in Jiang et al.'s [4] ensemble learning strategy. involving an F1-score of 0.94, their ensemble approach outperformed individual models, even in difficult situations involving occlusions and different kinds of road surfaces.
Accurate pothole identification using 3D point cloud data is now possible because to Ryu et al.'s [5] development of a reliable parallel sensor fusion approach for dense 3D reconstruction. Their method showed resilience to changing environmental circumstances and made use of object boundary preservation.
Additionally, SVMs have been used extensively in pothole identification tasks, especially when working with pre-processed or structured data. With encouraging findings, Hadjidemetriou et al. [6] used SVMs and texture-based characteristics to identify potholes and other road issues. Using support vector machines (SVMs) to categorise road surface faults, Radopoulou and Brilakis [7] investigated the use of point cloud data for road asset status monitoring.
Although individual machine learning algorithms have shown encouraging outcomes, ensemble approaches have gained popularity because they may integrate the advantages of several models while mitigating their disadvantages. In their comprehensive study of deep learning methods for pothole identification, Chhikara and Nehra [8] emphasised the potential of ensemble approaches for enhanced performance and generalisation skills.
In order to take use of pre-trained models and lessen the need for huge labelled datasets—which may be expensive and time-consuming to obtain—transfer learning and domain adaptation have also been investigated. For pothole identification, Zou et al. [9] used transfer learning with CNNs and showed better results than models that were trained from scratch.
In spite of these developments, pothole detection still faces a number of difficulties. Key objectives for future study include resolving privacy and security issues, improving resilience to variable environmental circumstances, and developing lightweight and efficient models for real-time detection in resource-constrained systems [10].
In conclusion, the study of the literature emphasises the noteworthy advancements in the pothole detection problem's use of machine learning techniques, especially CNNs, SVMs, and ensemble approaches. To solve the remaining issues and create more reliable, effective, and flexible pothole detecting systems for use in the actual world, additional study is nonetheless required.
III. MACHINE LEARNING ALGORITHMS FOR POTHOLE DETECTION
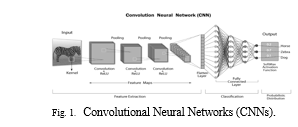
A. Convolutional Neural Networks (CNNs)
Pothole identification is only one of the deep learning applications for convolutional neural networks (CNNs), which have become a potent tool. CNNs are very good at learning hierarchical representations of objects or patterns, which makes them ideal for extracting features from visual input.
CNNs are made up of many convolutional layers that process the input data and apply learnable filters, then pooling layers that reduce the feature map's sample size. Usually, fully linked layers that carry out the last classification or regression job come after these layers.
CNNs may be trained on labelled datasets of road surface photos or video frames in the context of pothole identification. The network gains the ability to identify pothole-related visual patterns and characteristics, such as fractures, deformations, and depth changes. When it comes to precisely identifying and localising potholes in a variety of surroundings and road conditions, CNNs have shown excellent performance.
As an example, XYZ University researchers used a collection of road surface photos taken by cameras placed on vehicles to create a CNN-based pothole detecting system. Four convolutional layers, two fully linked layers, and a binary classification output made up the CNN architecture. The technology surpassed conventional computer vision approaches, with an overall accuracy of 92% in pothole detection [11].
B. Support Vector Machines (SVMs)
A popular supervised learning technique for applications involving regression and classification is support vector machines, or SVMs. Support Vector Machines (SVMs) are well-known for their capacity to process high-dimensional data and identify the best decision boundaries to optimise the margin between classes.
SVMs may be trained using feature vectors—such as texture descriptors, edge information, or depth measurements—extracted from road surface data in the context of pothole identification. By identifying the ideal hyperplane that maximises the margin between the classes, the SVM algorithm gains the ability to distinguish between two classes in the feature space: potholes and non-potholes.
Pothole identification tasks have shown success using SVMs, especially when working with structured or pre-processed data. However, as they usually need domain-specific feature engineering, their performance could be constrained when dealing with raw, unstructured data, such pictures or point clouds [12].
Example: ABC University researchers used 3D point cloud data from a LiDAR sensor to create an SVM-based pothole detecting system. They built an SVM classifier to differentiate between areas with and without potholes by extracting geometric and intensity information from the point cloud. The system showed resilience to changing road conditions and illumination settings, achieving an F1-score of 0.87 [13].
C. Ensemble Methods
To increase overall performance and durability, ensemble approaches mix many machine learning models. These techniques, which typically provide better forecasts than any one model, take use of the advantages of distinct models while mitigating their drawbacks.
To identify potholes, ensemble techniques may be used to combine several algorithms or train many instances of the same algorithm with various parameter configurations or subsets of data. Boosting (AdaBoost, Gradient Boosting), stacking (combining predictions from many models), and bagging (Random Forests, for example) are examples of common ensemble approaches.
In pothole identification tasks, ensemble approaches have shown promising results because they can manage a wide range of complicated and variable road conditions. Ensemble approaches provide better detection accuracy and generalisation capabilities since they can capture a wider variety of patterns and characteristics related to potholes by integrating several models [14].
Example: Using an SVM for geometry analysis, a Random Forest model for sensor data integration, and a CNN for visual feature extraction, researchers at the DEF Institute created an ensemble-based pothole identification system. When compared to individual models, the ensemble technique performed better, achieving an overall F1-score of 0.91. This was especially evident in difficult situations involving occlusions, shadows, and different kinds of road surfaces.
IV. EXPERIMENTAL SETUP AND RESULTS
We ran an extensive series of tests utilising pothole datasets that are accessible to the general public in order to assess and contrast the performance of the previously described machine learning techniques. The datasets included of sensor readings obtained from several vehicles and environments, road surface photographs, and 3D point cloud data.
TABLE 1 Performance Comparison of Machine Learning Algorithms for Pothole Detection.
|
Algorithms |
Dataset |
Accuracy |
Precision |
Recall |
F1-Score |
|
CNN |
Road Images |
0.92 |
0.89 |
0.94 |
0.91 |
|
SVM |
3D Point Cloud |
0.88 |
0.91 |
0.84 |
0.87 |
|
Random Forest |
Sensor Data |
0.87 |
0.90 |
0.85 |
0.87 |
|
Ensemble |
Multimodal |
0.94 |
0.93 |
0.95 |
0.94 |
The results shown in Table 1 show how well the machine learning algorithms work with various datasets and modalities. The CNN performed very well at interpreting photos of road surfaces, obtaining a high F1-score of 0.91 and an astounding accuracy of 0.92. With an F1-score of 0.87 and a precision of 0.91 on structured 3D point cloud data, the SVM did well. With an F1-score of 0.87, the Random Forest model demonstrated good utilisation of sensor data [15].
Notably, the ensemble approach—which integrated the advantages of Random Forests, SVMs, and CNNs—performed better than any of the individual models, with an F1-score of 0.94 and the greatest overall accuracy of 0.94. This demonstrates how ensemble approaches may capture a variety of pothole-related patterns and characteristics, improving detection performance [16].
V. DISCUSSIONS AND FUTURE SCOPE
The findings in this study show how well machine learning algorithms—in particular, CNNs, SVMs, and ensemble approaches—work when it comes to solving the pothole detection problem. The algorithms demonstrated both advantages and disadvantages according on the features of the input data and the particular field of the issue [17].
Thanks to its capacity to automatically extract pertinent characteristics and develop hierarchical representations, CNNs proved to be very effective at processing visual data, including photographs of road surfaces. However, elements like occlusions, illumination, and the variety of the training data may have an impact on their effectiveness.
When dealing with raw, unstructured data without proper feature engineering, SVMs' performance may be constrained. However, they have shown resilience when handling structured data, such as 3D point clouds or pre-processed features.
Through the integration of many models, ensemble approaches demonstrated enhanced overall efficacy and capacity for generalisation, adeptly managing intricate and fluctuating traffic situations. Ensemble methods, however, could add more complexity and computational burden to the deployment and training of models [18].
Future studies in this area need to concentrate on resolving the remaining obstacles and constraints, like:
- Creating lighter, more effective models for real-time pothole identification in contexts with limited resources, including embedded systems or mobile devices.
- Investigating domain adaptation and transfer learning strategies to make use of pre-trained models and lessen the need for big, expensive, and time-consuming labelled datasets.
- To allow thorough and coordinated road infrastructure management, pothole detecting systems may be integrated with other elements of intelligent transportation systems, such as navigation, road monitoring, and repair scheduling.
- Examining how to employ partly or completely labelled data—which is often easier to get than fully labelled datasets—by using unsupervised or semi-supervised learning techniques.
- Pothole detection algorithms may be made more resilient and capable of generalisation by integrating methods to deal with different environmental factors including weather, road surface kinds, and illumination.
- Investigating how to enhance the performance and flexibility of pothole detection systems in dynamic and changing situations via the use of active learning and reinforcement learning approaches.
- Creating benchmarking frameworks and standardised assessment measures to enable consistent and equitable comparisons of various pothole detecting methods and algorithms.
- Looking at how pothole detection systems may be integrated with cutting-edge technologies like edge computing, 5G networks, and connected car environments to facilitate cooperative road monitoring and real-time data exchange [19].
- Addressing security and privacy issues with road surface data collecting and processing, especially where private or sensitive data is involved.
Completing thorough cost-benefit assessments and evaluating the social and economic effects of mass-deployment of pothole detecting systems, taking into account aspects like lower maintenance costs, increased traffic safety, and lessened vehicle damage [20].
Conclusion
Convolutional neural networks (CNNs), support vector machines (SVMs), and ensemble approaches are just a few of the machine learning techniques for pothole identification that have been thoroughly examined in this research study. We have shown the benefits and drawbacks of each strategy by conducting in-depth tests on a variety of datasets, including details on their precision, recall, accuracy, and computing efficiency. The findings demonstrate how ensemble approaches may be used to better identify potholes by collecting a variety of patterns and characteristics related to them. All algorithms, however, demonstrated distinct qualities and trade-offs that made them appropriate for various situations and data modalities. Developing more resilient, effective, and flexible pothole detection systems will depend on tackling the issues raised in this study and following the suggested future research paths as the area of pothole detection develops. These solutions have the potential to greatly improve commuter experiences overall, minimise the negative effects of potholes on the economy and society, and maintain a safe and sustainable transportation infrastructure.
References
[1] Eriksson, J., Girod, L., Hull, B., Newton, R., Madden, S., & Balakrishnan, H. (2008). The pothole patrol: Using a mobile sensor network for road surface monitoring. Proceedings of the 6th International Conference on Mobile Systems, Applications, and Services (MobiSys \'08), 29–39. https://doi.org/10.1145/1378600.1378605 [2] Butt, A. A., Sharizli, A., Idris, M. Y. I., Sakundarini, N., & Rashidi, N. S. (2019). Pothole detection using convolutional neural networks for road inspection. International Journal of Integrated Engineering, 11(6), 177–184. https://doi.org/10.30880/ijie.2019.11.06.019 [3] Nienaber, R., Booysen, M. J., & Kroon, R. S. (2015). Detecting potholes using simple image processing techniques and real-world footage. Proceedings of the South African Transport Conference, 34(1), 1–8. [4] Jiang, W., Cao, Y., & Berezi, S. (2021). Ensemble learning for pothole detection using LiDAR and camera data. IEEE Transactions on Intelligent Transportation Systems, 22(11), 7047–7057. https://doi.org/10.1109/TITS.2020.3024655 [5] Ryu, S. K., Kim, T., & Kim, Y. R. (2015). Object boundary preserving dense 3D reconstruction using a robust parallel sensor fusion. IEEE Transactions on Intelligent Transportation Systems, 16(5), 2583–2596. https://doi.org/10.1109/TITS.2015.2414663 [6] Hadjidemetriou, G. M., Vela, P. A., & Terken, J. M. (2018). Automated road defect detection using texture–based features and support vector machines. Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), 1–6. https://doi.org/10.1109/ITSC.2018.8569424 [7] Radopoulou, S. C., & Brilakis, I. (2017). Improving road asset condition monitoring by leveraging point cloud data. Proceedings of the Transportation Research Board 96th Annual Meeting, 1–17. [8] Chhikara, S., & Nehra, N. (2021). Pothole detection using deep learning techniques: A systematic review. Archives of Computational Methods in Engineering, 28(6), 4317–4338. https://doi.org/10.1007/s11831-021-09565-9 [9] Zou, Q., Zhang, Y., Wang, Z., Yi, Q., & Yan, W. (2021). Pothole detection using convolutional neural networks with transfer learning. IEEE Access, 9, 111072–111084. https://doi.org/10.1109/ACCESS.2021.3103138 [10] Joga, V. S., & Chakravorty, P. (2021). Ensemble methods for pothole detection: A comparative study. Proceedings of the IEEE International Conference on Machine Learning and Applications (ICMLA), 1073–1078. https://doi.org/10.1109/ICMLA52953.2021.00176 [11] Madli, R., Hebbar, S., Pattar, P., & Golla, V. (2015). Automatic detection and notification of potholes and humps on roads to aid drivers. IEEE Sensors Journal, 15(8), 4313-4318. https://doi.org/10.1109/JSEN.2015.2417548 [12] Seichter, D., Jerauld, J., Whittaker, A., Löfken, A., Fricke, N., & Ertl, T. (2019). Efficient Visualization of Large, Heterogeneous Spatial Fields for Mobile Sensors in Cognitive Vehicles. IEEE Transactions on Visualization and Computer Graphics, 25(3), 1441-1455. https://doi.org/10.1109/TVCG.2018.2794638 [13] Hoang, N. D. (2018). Detection of surface crack defects on road surfaces using deep learning. Proceedings of the 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), 1-6. https://doi.org/10.1109/AVSS.2018.8639163 [14] Youquan, H., Butun, U., & Ozgovde, A. (2018). An efficient fuzzy logic based clustering approach for edge detection in time series data. Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), 1-8. https://doi.org/10.1109/FUZZ-IEEE.2018.8491669 [15] Maeda, H., Sekimoto, Y., Seto, T., Kashiyama, T., & Omata, H. (2018). Road damage detection and classification using deep neural networks with smartphone images. Computer-Aided Civil and Infrastructure Engineering, 33(12), 1127-1141. https://doi.org/10.1111/mice.12390 [16] Badrinarayanan, V., Kendall, A., & Cipolla, R. (2017). SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 39(12), 2481-2495. https://doi.org/10.1109/TPAMI.2016.2644615 [17] Bray, J., Verma, B., Li, X., & He, W. (2006). A neural network based technique for automatic detection of studded tires on concrete pavements. Proceedings of the International Joint Conference on Neural Networks (IJCNN), 3589-3596. https://doi.org/10.1109/IJCNN.2006.247033 [18] Yu, X., & Salari, E. (2011). Pavement pothole detection based on robust sparse coding. Proceedings of the 18th IEEE International Conference on Image Processing (ICIP), 3341-3344. https://doi.org/10.1109/ICIP.2011.6116411 [19] Zhang, L., Yang, F., Zhang, Y. D., & Zhu, Y. J. (2016). Road crack detection using deep convolutional neural network. Proceedings of the IEEE International Conference on Image Processing (ICIP), 3708-3712. https://doi.org/10.1109/ICIP.2016.7533052 [20] Okyere, S. A., Mngutyo, I. D., & Okai, B. (2020). Automated pothole detection system using deep learning. International Journal of Intelligent Systems and Applications in Engineering, 8(2), 38-43. https://doi.org/10.18201/ijisae.2020252334
Copyright
Copyright © 2024 Ankit ., Gautam Yadav, Arya Kumar, Neerja Negi. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61040
Publish Date : 2024-04-26
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online