

Ijraset Journal For Research in Applied Science and Engineering Technology
A Machine Learning-Based Smart City Garbage Collection System
Authors: Aswini V , Keerthana M, NehaShree G, Sasmitha S
DOI Link: https://doi.org/10.22214/ijraset.2023.54417
Certificate: View Certificate
Abstract
During the process of smart city construction, city managers always spend a lot of energy and money for cleaning street garbage due to the random appearances of street garbage. Consequently, visual street cleanliness assessment is particularly important. However, the existing assessment approaches have some clear disadvantages, such as the collection of street garbage information is not automated and street cleanliness assessment is not real-time. To address these disadvantages, this paper proposes an urban street cleanliness assessment approach using mobile edge computing and deep leaning. First the sensor are installed inside the dustbin and obtain up to the particular threshold . then Mobile edge service is used to store and extract street image information temporarily. And faster R-CNN is used to identify the street garbage categories and count the amount of garbage. Those data are sent to the sensor. They serve to collect data, pushing it and sharing it with whole network of connected devices. The practical application shows the feasibility and usability of the approach.
Introduction
I. INTRODUCTION
A smart city is an urban area that uses state-of-the art technologies such as the Internet of Things (IoT) and other technologies to manage and assess the resources and environment of a city in an efficient way The smart city concept integrates information and communication technology, and various physical devices connected to the network to optimize the efficiency of city . However, due to the rapid development of a smart city, city managers are facing huge challenges in how to develop and maintain urban infrastructure.
Street keeping the streets clean is good for the development of modern cities. Currently, many major cities regard urban street cleanliness as one of the primary tasks of urban civilization. If the urban street cleanliness level does not pass the predefined standard, it will have a serious effect on citizen’s satisfaction and also affect the overall reputation of the city. At present, the large number of streets make the amount of garbage on streets uncontrollable. The process of garbage detection on streets is not automated and always requires human intervention at almost every level. people’s check the location of garbage manually and submit . Urban Street Cleanliness using internet of things and Machine Learning reports to city administrators, It is a methodology of garbage collection is based on the sensor fixed in the position , measurement that need to sensed that is the threshold frequency.
II. LITERATURE SURVEY
- Urban Street Cleanliness Assessment Using Mobile Edge Computing and Deep Learning – [1]
The overall approach is illustrated and visualized using the street images of Jiangning District in Nanjing, China. The practical application shows the feasibility and usability of the approach.
2. Approach to the garbage collection in the “Smart Clean City” project – [2]
In this paper we describe a system architecture to find time-optimal dynamic route for garbage trucks within “Smart Clean City” project. We propose a formal mathematical model of the task of dynamic optimal route and formal the optimization criterion for time-optimal garbage collection of waste from landfill.
???????3. A Deep Learning Framework for Smart Street cleaning –[3]
Conventional street cleaning methods include street sweepers going to various spots in the city and manually verifying if the street needs cleaning and taking action if required.
4. Faster R-CNN Towards Real-Time Object Detection with Region Proposal Network – [4]
State-of-the-art object detection networks depend on region proposal algorithms to hypothesize object locations. Advances like SPPnet [1] and Fast R- CNN [2] have reduced the running time of these detection networks, exposing region proposal computation as a bottleneck. In this work, we introduce a Region Proposal Network(RPN) that shares full-image convolutional features with the detection network, thus enabling nearly cost-free region proposals.
5. Top – K Query Based Dynamic Scheduling for IoT- enabled Smart City Waste Collection – [5]
The objective of this paper is to address the smart innovation ecosystem characteristics that elucidate the assembly of all smart city notions into green, interconnected, instrumented, open, integrated, intelligent, and innovating layers composing a planning framework called, Smart City Reference Model.
6. Smart city dashboard for integrating various data of sensor networks – [6]
Urban growth may lead to various problems. The increasing number of citizens at urban areas may lead the increasing of demand such as new residential, public health, public transport. A city require basic infrastructure such as educational facilities, housing, clean water, sanitation, solid waste, electricity, telecommunications and so on. In the socio-economic level the increasing of city residents must be supplied with availability of jobs.
7. Robust waste collection exploiting cost efficiency of IoT potentiality in Smart Cities – [7]
Cities constitute the future of civil habitation. Internet of Things (IoT) enable innovative services exploiting sensor data from sensors embedded in the city. Waste collection is treated as a potential IoT service which exploits robustness and cost efficiency of a heterogeneous fleet.
8. Object Detection with Discriminatively Trained Part- Based Models – [8]
We describe an object detection system based on mixtures of multiscale deformable part models. Our system is able to represent highly variable object classes and achieves state-of-the-art results in the PASCAL object detection challenges.
???????III. EXISTING SYSTEM
During the process of smart city construction, city managers always spend a lot of energy and money for cleaning the garbage . Consequently, visual street cleanliness assessment is particularly important. However, the existing assessment approaches have some clear disadvantages, such as the collection of street garbage information is not automated and street cleanliness information is not real-time.
To address these disadvantages, this paper proposes a novel urban street cleanliness assessment approach using mobile edge computing and deep learning.
First, the higher resolution camera’s installed on vehicles collect the street images. Mobile edge servers are used to store and extract street image information temporarily. Second, these processed street data is transmitted to the cloud data center for analysis through city networks. At the same time, Faster Region- Convolutional Neural Network (Faster R-CNN) is used to identify the garbage at the street categories and count the number of garbage. Finally, the results are incorporated into the street cleanliness calculation framework to ultimately visualize the street cleanliness levels, which provide them to manage and clean the garbage .
IV. PROPOSED SYSTEM
This garbage collection system is always used on sunny days as well as in all climatic situations. The number of garbage are detected using deep learning and messages are send using IoT based sensors. Since the sensors are fitted in camera not in vehicles, no manual work is needed.
The main objective of the system is to make the garbage collection system must easier and efficient. this helps to know about garbage at road side through the image processing sensor added in the road side camera the processed images will be compared with the already feed details.so that it can verify the garbage based upon the size , type of garbage which are already feed in the monitoring system. Through that system the notification will be send through the garbage to the corporation. so that they can get details about street no and can collect the garbage.
???????A. Ultrasonic Sensor
Ultrasonic is used to generate or sense ultrasound energy it measures the distant materials of the target material by emitting the ultrasonic sound waves, converts the reflected sound into an electrical signal it used to travel fast easily the objects can be identified.

- Usability
a. Measurement of a particular ranged objects
b. Detection of waste along the street
c. Monitoring the level of water or liquid
d. Mass people detection
e. Anti-collision detection
f. Box sorting techniques
2. Features
a. Resistant to mist
b. Detection of complex material
c. High accuracy
d. Range – from 40 to 70KHz
e. High frequency sound waves
f. Portable and small sized
g. High sensitivity
B. GSM Module
It’s a small sized and low cost electronic boards used in programming to easily integrate with hardware components like sensors and smart devices. This can function as single board PC. Latest version of Raspberry pi is Model B. When compared to the previous version the processing speed is more with this model and 10 times quicker that 1st gen version. This model has seamless connectivity to Bluetooth and wireless LAN. There is a time gap between transmitting ultrasonic sound and receiving the reflected sound waves. With the help of this time gap, the percentage filled up inside the garbage bin is known. If the percentage of garbage is greater than 85%, then Ultrasonic sensor sends the alert signal to the Arduino Uno that the Dustbin is going to full . otherwise if there is no time gap between the ultrasonic sensors and receiving sound waves the GSM module will send that the dustbin is not full message to the required mobile number as short message .

Sample specification of GSM Module:
|
Attribute |
Value |
|
Power input |
3.4-4.5 V |
|
Operating frequency |
850 MHz |
|
Output pin voltage |
5V dc |
|
Operating Voltage rating |
3.2V-4.8V dc |
|
Communication mode |
UART interface |
|
Output pin current |
25mA |
|
Baud rate |
9.6kb/s |
???????C. Arduino Board
This is more or less similar to Raspberry pi but the major difference is Arduino board is not a single board but a micro controller. This doesn’t have an inbuilt operating system and can work well with electrical signals.
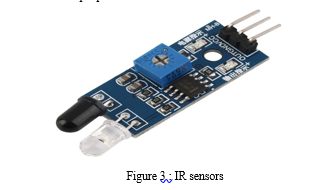
D. IR Sensor
IR sensors are now widely used in motion detectors, which are used in building services to switch on lamps or in alarm systems to detect unwelcome guests. In a defined angle range, the sensor elements detect the heat radiation (infrared radiation) that changes over time and space due to the movement of people.
V. METHODS AND IMPLEMENTATION
A. Identification of Object
Smart city constructions have been more focussed on the cities. Smart cities use intelligent methods to sense and handle the activities through internet of things, machine learning, cloud computing concept which improves the quality of society and economy First to identify the piles of garbage on the road, we use ultrasonic sensors fixed in the road side trash whenever it obtains a particular threshold it gives information’s to corporation authorities
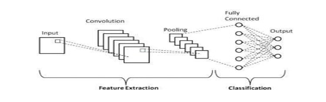
To this process certain road side garbage images are divided and labelled then they use CNN to segment the area containing the garbage.
B. Message Passing
After the trash cans in the area is filled up to the certain threshold frequency immediately the message is passed to the local corporation without any cloud storage in-between. These messages are passed through the GSM Module so that the corporation can easily identify the area and collect the garbage on time. So, The garbage stagnation inside the trash is avoided the bacteria and virus is not left to spread and cause diseases can be prevented.
C. Segregation
Segregation can be done by selecting the garbage and dividing them as dry waste and wet waste and using the same ultra sonic sensor large amount of data sets are feed into the sensor so that the different types of trashes can be easily identified and segregated. Moisture sensor recognizes the measure of water by taking away the dry load from the underlying weight, and the dampness content is then determined as the measure of water isolated by the dry weight or all out weight, contingent upon the announcing strategy. An ultrasonic sensor is attached to the front side of the garbage bin. IR sensor detects the object when placed on the plank. Based on the moisture content present in the object, moisture sensor will detect the type of waste. The waste is segregated accordingly in to the bins. Servo motor helps in the process of placing the waste in respective bins by rotating the plank. When the object is placed on the plank one by one, servo motor will turn on and IR sensor detects the object. Depending upon the type of object placed on the plank, moisture sensor detects whether the object is wet or dry. Depending upon this result, servo motor sends the waste into corresponding bins. Later ultrasonic sensor measures the distance from the surface of the bin to garbage. When the bin is full, sensor sends a message to Arduino Uno and this signal is passed to computer. The process terminates here until bin is empty
D. IOT Based Sensors
Ultrasonic sensors convert ultrasound waves to electrical signals and vice versa. These devices work on a particular similar to that used by the sensors in radar and sonar systems, which evaluate the attributes of the target object by processing the echoing signals from Radio or sound waves, respectively. Ultrasonic sensors consists of two parts: a transmitter and receiver, which create a transducer that converts ultrasonic waves into electrical signal(A/C) or vice versa. The transceiver vibrates and create an ultrasonic wave that is transmitted and travels until it hits an object and is reflected to the receiver. The basic format is the time is equal to distance divided by speed, can be used to measure fluid level, fluid identification/concentration, and distance.
VI. PROPOSED SYSTEM ARCHITECTURE
A. Arduino Uno
We have used single board micro-controller that uses ATmega-328p specification. Board used in proposed set up has 14 input / output ports. Selected hardware is an open source and available in both 8 bit and 32-bit variants.
- Additional Specification
|
Attribute |
Value |
|
Input voltage |
8-12 V |
|
Max Voltage |
25 V |
|
Digital Input Ports |
6 |
|
Analog Input Ports |
6 |
|
Speed |
16 MHz |
|
Weight |
25 g |
|
Memory (Flash) |
32 KB |

Proposed setup has three layers 1) Input layer, 2) Core processing middleware made up of Arduino and 3) Output layer.
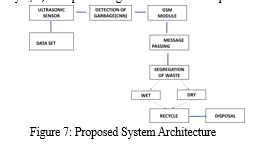
We have collected the data sets, then the data sets are used to detect the garbage using ultrasonic sensors, the garbage detection uses CNN algorithm, This algorithm is used for image detection in better quality, after detection we send the message through the GSM module, then the waste is separated into wet and dry waste. The waste is finally disposed of after both go through the recycling process. The software which we are using is Arduino IDE V1 on Windows 11.The hardware includes Ultrasonic sensor, GSM Module ,Arduino Board.
2. Algorithm
a. Initialize ultrasonic sensor used in garbage collection system with appropriate power and energy.
b. Connect ultrasonic sensor output port from step one Arduino’s input.
c. Define the particular threshold frequency of range.
d. Set the vcc and ground pin and servo motor pins in appropriate position the connections need to be carefully checked before setting up this value otherwise the board will be damaged.
e. Process the input data through sensor and identify the garbage in the dustbin and record till it reaches the particular threshold.
f. Test the setup for multiple frequencies.
g. Repeat this testing until the model is trained with sufficient samples and until the accuracy of system adheres to appropriate value.
3. CNN Algorithm
VII. RESULTS AND DISCUSSION
The proposed system was integrated through sensors where different types of garbage from different area where easily identified and message is passed easily through the message passing GSM module the prototype are divided into 3 module first the identification of object up to particular threshold the output of first module is analysed and then second is the message passing where the detected area the message is easily send through SMS along with area code the using QR code scanning method segregation of waste is taken place has bio degradable and non- biodegradable waste. The most important reason for waste collection is the protection of the environment and the health of the population. Rubbish and waste can cause air and water pollution.
VIII. FUTURE ENHANCEMENTS
Using this model we have demonstrated how to the sensors works on the garbage detection and how the gsm module are used in passing the information to the cooperation this model is well balanced and deployed in large scale along with low man power and more future technologies were used. main advantage of this model is to reduce the fungus, bacteria that spread through the road side left over garbage in order to that took initiative to clean the trash can before it gets full. which is easier than the existing model instead of using more man power in it
This set is used to only segregate the non- biodegradable waste easily through QR code scanner dustbins. in order to implement the progress of the process the bio degradable dustbin are also will be implemented soon. the testing of this model can be extended in future more and turned to perfection
References
[1] U. Aguilera, O. Peña, O. Belmonte, and D. López- de-Ipiña, ‘‘Citizencentric data services for smarter cities,’’ Future Gener. Comput. Syst., vol. 76, pp. 234–247, Nov. 2017. [2] M. Armbrust et al., ‘‘A view of cloud computing,’’ Commun. ACM, vol. 53, no. 4, pp. 50–58, Apr. 2010. [3] C. Badii, P. Bellini, D. Cenni, A. Difino, P. Nesi, and M. Paolucci, ‘‘Analysis and assessment of a knowledge based smart city architecture providing service APIs,’’ Future Gener. Comput. Syst., vol. 75, pp. 14–29, Oct. 2017. [4] C. Balchandani, R. K. Hatwar, P. Makkar, Y. Shah, P. Yelure, and M. Eirinaki, ‘‘A deep learning framework for smart street cleaning,’’ in Proc. IEEE 3rd Int. Conf. Big Data Comput. Service Appl., Apr. 2017, pp. 112–117. [5] A. Borozdukhin, O. Dolinina, and V. Pechenkin, ‘‘Approach to the garbage collection in the ‘smart clean city’ project,’’ in Proc. IEEE 4th Int. Colloq. Inf. Sci. Technol. (CiSt), Oct. 2016, pp. 918–922. [6] L. J. C. Brinez, A. Rengifo, and M. Escobar, ‘‘Automatic waste classification using computer vision as an application in colombian high schools,’’ in Proc. Netw. Electron. Media, Sep. 2015, pp. 1–5. [7] N. T. Buck and A. While, ‘‘Competitive urbanism a n d t h e l i m i t s t o s m a r t cityinnovation:TheUKfuturecitiesinitiative,’’Urban Stud.,vol.54,no.2, pp. 501–519, Feb. 2017. [8] A. Cocchia, ‘‘Smart and digital city: A systematic literature review,’’ Tech. Rep., 2014, pp. 13–43. [9] Eurropean Telecommuunication Standards Institute (ETSI). Mobile Edge Computing[EB/ OL]. Accessed: 3 , Dec. 2016 . [ Online]. Available:http://www.etsi.org/technologies- clusters/technologies/mobileedgecomputing [10] FengLei IBM Microsoft, Ali and Other Giants Use AI to Explore Smart Cities. Accessed: 22,Jul. 2017. [Online]. Available: http://news.ifeng. com/ a/20170622/51302864_0.shtm [11] R. Girshick, ‘‘Fast R-CNN,’’ in Proc. IEEE Int. Conf. Comput. Vis. (ICCV), Dec. 2015, pp. 1440– 1448. [12] I. A. T. Hashem et al., ‘‘The role of big data in smart city,’’ Int. J. Inf. Manage., vol. 36, no. 5, pp. 748–758, Oct. 2016. [13] A. Hefnawy, A. Bouras, and C. Cherifi, ‘‘Integration of smart city and lifecycle concepts for enhanced large-scale event management,’’ in Proc. IFIP Int. Conf. Product Lifecycle Manage. Springer, Oct. 2015, pp. 687–697. [14] R. G. Hollands, ‘‘Will the real smart city please s t a n d u p ? I n t e l l i g e n t , p r o g r e s s i v e o r entrepreneurial,’’ City, vol. 12, no. 3, pp. 303–320, Dec. 2008. [15] Y.-C. Jang, P. Jain, T. Tolaymat, B. Dubey, and T. Townsend, ‘‘Characterization of pollutants in Florida street sweepings for management and reuse,’’ J. Environ. Manage., vol. 91, no. 2, pp. 320–327, Nov./Dec. 2010.
Copyright
Copyright © 2023 Aswini V , Keerthana M, NehaShree G, Sasmitha S. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54417
Publish Date : 2023-06-26
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online