

Ijraset Journal For Research in Applied Science and Engineering Technology
Mine Detecting Military Bot using IoT
Authors: Jayant V. Kulkarni, Sanket Kale, Prajwal Kasare, Dhananjay Kasture, Vaishnavi Kulkarni
DOI Link: https://doi.org/10.22214/ijraset.2023.57208
Certificate: View Certificate
Abstract
In the modern world, many countries are innovating different technologies for national security. Therefore, it is crucial to consider how military people who protect their respective countries\' national security can stay secure.During a combat, many soldiers lose their lives in remote areas or close to borders. Landmines are explosive devices that may be buried in the ground and detonate with just 9 kg of pressure when someone steps on them. Additionally, it degrades soil productivity, damages soil structure, and increases soil erosiveness due to wind and water. Mines continue to cause harm to innocent bystanders and soldiers even after a combat is concluded. According to this study, it would be possible to identify mines in front of a robotic vehicle and detonate minefields while also saving the lives of soldiers. After locating the position of a landmine using a GPS and GSM module, it will also give latitude and longitude data.
Introduction
I. INTRODUCTION
Different robots that can be used to complete jobs in hazardous locations and that can be used to lower dangerous levels of instability there are currently being developed. Robots are gradually replacing humans in common applications like urban hunts, salvage, and military purposes. One of these uses is the detection of landmines. An explosive device known as a landmine can harm both people and animals. Typically, landmines are buried 10 to 40 mm (or 1.57 in) below the surface of the earth and require at least 9 kg of pressure to explode. Indeed, landmines pose a huge threat to both military and civilians around the world, and they significantly slow down the construction of roads, irrigation systems, and agricultural land.
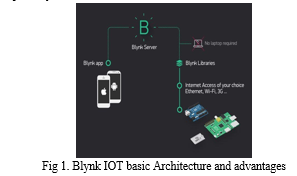
To address the aforementioned problems, a robot prototype that can locate concealed landmines and report their location is currently being created. This will enable the operator to precisely locate landmines. A metal detector utilising Electromagnetic Induction (EMI)-based sensors can be used to locate metal mines. As soon as a landmine is discovered, the robotic vehicle stops there and the GPS module is activated. By extracting the GPS data, latitude and longitude information for a specific location can be found. The Blynk app receives longitude, latitude, as well as the data that has been gathered. The user of the Blynk app can navigate and steer the robotic vehicle in all directions. The Blynk app transmits the signal using IOT.
Additionally, a GSM module (SIM800L) that is built into this project serves the primary function of sending data reliably even without an internet connection. Due to this, our robot prototype is strong and durable even on rough terrain.
This project also includes a number of gas sensors, such as the MQ2 and MQ4, which can identify both hazardous and combustible gases and communicate the concentration level to the robot operator. With this capability, our robot can be employed in tunnels or other cramped spaces where soldiers have historically encountered hazardous gases during covert operations.
There are two ways the operator can get the gathered data. The first method involves using a Blynk app that is online, and the second involves using a 2G, 3G, or 4G-capable device that can receive SMS messages. In order to design the best feasible route for soldiers or vehicles during various missions, he can utilise the data to analyse the placement of mines on a GPS map. Data from gas sensors can alert the operator and possibly save lives.
II. LITERATURE REVIEW
The Internet of Things (IoT) is a development that is slowly gaining traction and is speeding up communication. To protect warfighters, we need to use IoT in military applications. This article discusses various IoT applications and strategies for military missions, as well as the implementation processes and tactics that have been adopted and promoted internationally with the aid of a bot outfitted with various sensors, including a metal detector and other sensors to create connection between the bot and the base.
"Detection of Landmine using Robotic Vehicle" a paper by Prof. Y. Sharma [1] presented. The prototype of the autonomous landmine detecting and sweeping robot used in the present study is readily repeatable. Therefore, in nations where landmines are a problem, landmine detection investments can be undertaken at a lower cost. This prototype provides a more easy and cost-effective design for a landmine detection robot. It could alert the user about landmines buried beneath slopes and successfully transmit the landmine's coordinates so they can be safely deactivated without risk of an explosion.
M. Carrasco, D. Mery, and L. Robledo [15] review the technology review of land mine detection. Traditional mine detection (EMI) has been based on electromagnetic induction-based metallic mine detectors, but the main issue is the excessive number of alarms based on metallic noises. Radar that penetrates the earth is a more recent technique (GPR). Nuclear quadrupole resonance (NQR) appears to be highly successful, with radiofrequency (RF) signals produced by the 14N nuclei present in explosives. Electric impedance tomography (EIT) is another strategy, with a bi-dimensional array of electrodes being put to the surface to capture signals from the conductivity spectrum that can locate mines.
The work, "Development of location tracking system via short message service (SMS) based on GPS unblox neo-6m and sim 800l module," was written by Oktaf B. Kharisma [2]. The study's primary topic is GPS technology.The Global Positioning System, or GPS, is a widely used type of location-determining technology. The GPS navigation system uses radio signals to determine its location by using satellites. This GPS system can track an object and determine its precise location anywhere on the earth. A GSM modem is a specialist type of modem that utilises a SIM card and a mobile carrier connection, much like a mobile phone. One of the devices in use is the SIM 800L, which was created for an Android-based SMS-based tracking system.
III. METHODOLOGY
Robots are now able to perform a variety of tasks without human aid due to advances in artificial intelligence and the Internet of Things. This paper attempts to create an IOT-based BOT with Nodemcu that would benefit the army.
The Wi-Fi controlled robot is easy to use, as all you need to do is click the button in the direction you wish to move it. Pressing the Forward button will cause the robot to travel in the Forward direction, while pressing the corresponding buttons will move the robot in the Left, Right, and Backward directions. The collaboration between Nodemcu and the motor driver made this feasible.
Now, as soon as we release the button, it will return to the rest position. All of this was made possible by Nodemcu and the motor driver working together. The robot also includes MQ2 and MQ4 gas sensors that continually monitor gases like hydrogen, alcohol, smoke, and carbon monoxide (MQ2), as well as methane, propane, butane, and other flammable gases (MQ4). The Blynk app shows this information in the form of a concentration percentage metre. Batteries that can be recharged power the robot. 3.7V Li-Po and 3.7V (2x) Li-ion batteries are used to power the SIM800L GSM module and the circuit, respectively. The circuit includes a charging module (TP4056) so that all the batteries can be charged easily without the need to replace them.
Set up a dashboard on Blynk and create a template to configure buttons and gauges, including Wi-Fi name, password, and authentication token. The interface is user-friendly and straightforward.
- The robot's left, right, forward, and reverse directions are controlled by these buttons.
- A speed control slider is utilised to adjust the robot's speed; as speed increases, so does power consumption.
- Virtual mine LED: This LED shows whether or not a mine has been found.
- GPS interface: This has a lot of minor parts, including latitude, longitude, the vehicle's current speed, and the number of satellites our car is currently connected to for GPS. All of these elements are updated on a frequent basis, allowing for real-time tracking of our vehicle.
Let us take a brief stroll in understanding the Electronic as well as software components used in the proposed system.
a) NodeMCU
It has a microprocessor and an ESP8266-based open-source platform, which gives it Wi-Fi support. It has many pins that are used to attach sensors and accept electricity.


IV. RESULTS
The most important details in this text are that the prototype was tested in diverse physical environments, and that the gas sensors operated without a hitch in warm settings but showed a delay in output in colder settings due to the semiconductor's gradual heating. The Neo6M GPS module had connectivity to up to 18-22 satellites and a precision of up to 3-4 metres horizontally. The serial monitor of the Arduino IDE was used for testing, and the sensor data was connected to Blynk Cloud. The metal and gas sensors were evaluated for various values over the predetermined threshold, and the bot moved in accordance with the buttons that were pressed on the Blynk app. The prototype's tyres were selected for their superior grip, enabling it to function flawlessly in challenging terrain. The system's ability to effectively serve the military sector is demonstrated by the fact that every component is operating in perfect unison.
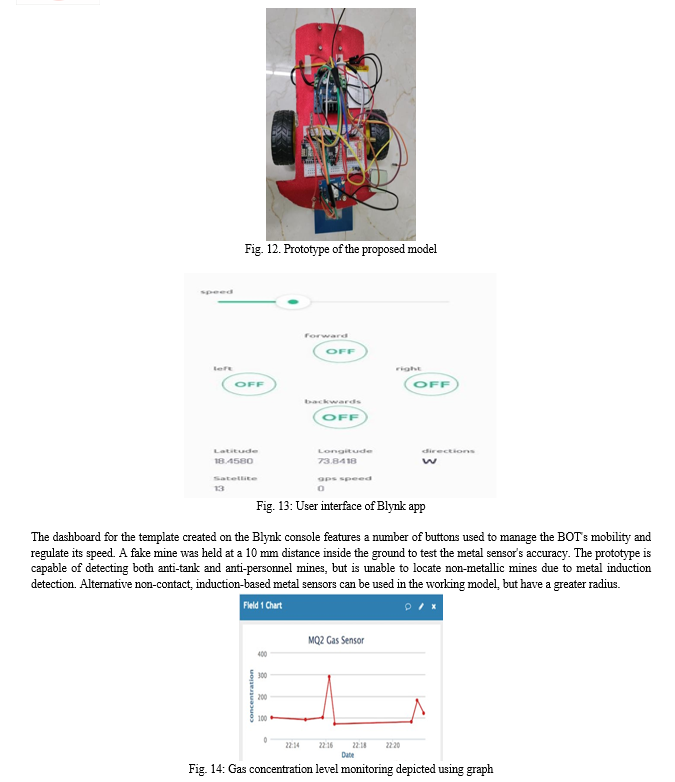
Figure 14 shows the continuous monitoring of the concentration level of the gas. LPG was introduced into the area around the sensor for testing, which caused a jump in the level of gas concentration in the graph.
Conclusion
Global action is still needed to address the problem of humanitarian demining. There is no one method for detecting landmines that is effective, and there is still room for improvement. To improve the effectiveness of landmine detection technology, a single system that combines different sensor types and detection algorithms should be created. Metal can only be detected using the current technology within a 10 cm radius, but ground penetrating radar or another detecting tool can be used in its place. This prototype provides a cheaper and less complicated landmine detection robot, which can also alert the user and successfully transmit the landmine\'s locations so that it can be safely detonated without the threat of an explosion.
References
[1] Prof. Y. Sharma, A. Tiwari, P. Parate, A. Khorgade, F. Shelki, A. Sheikh, “Detection of Landmine using Robotic Vehicle”, International Research Journal of Engineering and Technology (IRJET) - Volume: 07 Issue: 03, 2020. [2] Oktaf B Kharisma* , Dzikra A A, Mustakim, Rian Vebrianto, Rice Novita, Hasbullah, Irawati, Yulia Novita, Zaitun, Alwis Nazir, Iwan Iskandar, Yelfi Vitriani, Rina Rehayati and Tuti Andriani, “Development of location tracking system via short message service (SMS) based on GPS unblox neo-6m and sim 800l module”, The 1st Workshop on Environmental Science, Society, and Technology, 2019. [3] S.Charisma , S.Lekshmanan Pillai , R.Dhanyah , Ms. Sudha Mercy, “METAL AND GAS DETECTING ROBOT USING IOT”, International Journal of Scientific Research and Review, 2018. [4] Dinesh Panicker, Darsh Kapoor, Prajwal S.P, Mahesh A. Kamthe, “IoT Based smart Battery Management System”, International Research Journal of Engineering and Technology (IRJET), 2022. [5] Donny Auliya Arrohman , Nafis Ainun Fikriyyah, “Implementation of Micro Usb Charger TP4056 and Battery Indicator LED in Portable Solar Charge”, J. Nat. Scien. & Math. Res. Vol. 4 No.1 , 2018. [6] Rob Siegel, “Land Mine Detection”, IEEE Instrumentation & Measurement Magazine 23, 2002. [7] L. ROBLEDO*, M. CARRASCO and D. MERY, “A survey of land mine detection technology”, International Journal of Remote Sensing Vol. 30, No. 9, 10 May 2009. [8] Dr. S. Pavan, V. Bhavana, S. Masthan Sharif, S. Satyanarayana, J. S. Phanindra Kumar, “IOT Based Metal detecting robot”, International Journal of Electrical and Electronics Engineers, 2022. [9] Donny Auliya Arrohman1, Nafis Ainun Fikriyyah1, “Implementation of Micro Usb Charger TP4056 and Battery Indicator LED in Portable Solar Charge”, Jnsmr - Journal Of Natural Sciences and Mathematics Research, 2018. [10] H.T. Haskett and J.T. Broach, “Mine detection performance by fusing ground penetrating radars and metal detector,” in Proc. SPIE Conf. Detection and Remediation Technologies for Mines and Minelike Targets V, Orlando, FL, Apr. 2000 [11] Gaurav Golatkar, Prathmesh Ambekar, PrashantJadhav, Rohan Jadhav, Prajakta Borole. ‘Border Surveillance Using IpCamera’. In ‘IOSR Journal of Engineering (IOSRJEN)’ 2018. [12] V. Abilash and J. Paul Chandra Kumar. ‘Arduino Controlled Landmine Detection Robot’. In ‘Third International Conference on Science Technology Engineering and Management (ICONSTEM)’ 2017. [13] Prof. R.M. Sahu, Mamata .S. Sawant, Komal .S. Salve, Mangesh .N. Nakade. ‘Wireless Detection of Landmines using GPS & GSM’. In ‘International Journal of Innovative Research in Electrical, Electronics, Instrumentation and Control Engineering (IJIREEICE)’ 2016. [14] R. Siegel. “Land mine detection” IEEE Instrumentation and Measurement Magazine Volume: 5 issue: 4, 2002. [15] L. Robledo, M. Carrasco and D.Mery. “A survey of land mine detection technology”. International journal of remote sensing. Vol 30, 2009.
Copyright
Copyright © 2023 Jayant V. Kulkarni, Sanket Kale, Prajwal Kasare, Dhananjay Kasture, Vaishnavi Kulkarni. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET57208
Publish Date : 2023-11-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online