

Ijraset Journal For Research in Applied Science and Engineering Technology
Mobile-Controlled River Cleaning Robot: A Review
Authors: Kajal Jagtap, Sneha Gade, Tanishka Kate, Dr. B. E. Shinde, Prof. Umesh Balkishan Phiske
DOI Link: https://doi.org/10.22214/ijraset.2024.64438
Certificate: View Certificate
Abstract
This project focuses more on \"Remote Controlled Unmanned River Cleaning Bot\". In India water pollution is increasing day by day, Water pollution is a significant environmental issue, with rivers often acting as the primary carriers of waste materials such as plastics, debris, and other pollutants. Current manual cleaning methods are inefficient, costly, and other pollutants. Current manual cleaning methods are inefficient, costly, and unable to access certain areas of the water. This paper presents the development of a mobile-controlled river cleaning robot designed to tackle these challenges. The robot can be remotely operated via a mobile application, allowing for precise control of its navigation and cleaning operations. It is equipped with waste collection mechanisms and sensors to detect and remove debris from the river’s surface. The study covers the design, hardware and software components, and testing of the robot in real-world conditions. Results indicate that the mobile-controlled robot offers an effective, cost-effcient, and environmentally sustainable solution for maintaining cleaner waterways. This innovation has the potential to revolutionize river cleaning processes and significantly reduce water pollution.
Introduction
I. INTRODUCTION
Water pollution in rivers is a growing concern due to the accumulation of waste materials, including plastics, debirs, and other pollutants. Traditional methods of cleaning rivers are labor-intensive and often inefficient in reaching inaccessible areas. To address this challenge, the development of an automated, mobile-controlled river cleaning robot presents an innovative solution. This robot is designed to be remotely operated using a mobile device, enabling users to control its movements and functionality from a distance.
The robot is equipped with sensors and mechanisms to collect and remove waste, contributing to a more effcient and environmentally friendly cleaning process. This paper discusses the design, development, and testing of the mobile-controlled river cleaning robot, with a focus on it potential to improve the sustainability of waterway maintenance.
The integration of mobile technology enhances the robots usability by enabling real-time monitoring and contril, allowing operators to adjust its cource and operation as needed. This approach not only improves efficiency but also reduces the need for human intervention in hazardous environments, such as polluted or heavily contaminated waters.
The robot’s design incorporates ecofriendly elements, such as energy-efficient components and the potential for solar power integration, aligning with sustainable development goals. By automating the river cleaning process, this project offers a practical, cost-effective, and environmentally responsible solution to water pollution. In this paper, we explore the design, construction, and testing of the mobile controlled river rcleaning robot, emphasizing its potential impact on reducing water pollution and supporting cleaner, healthier aquatic ecosystems.
his paper explores the design, construction, and operational aspects of the mobile-controlled river cleaning robot. It also highlights the importance of integrating technology into environmental conservation efforts, presenting the robot as a sustainable and scalable solution to river pollution. Through field testing and evaluation, this research demonstrates how the robot can contribute to reducing water pollution, preserving aquatic ecosystems, and promoting long-term environmental health. Ultimately, this project aims to create an affordable and efficient tool that can be deployed in various water bodies, helping to address the global water pollution crisis.
II. LITERATURE SURVEY
Water pollution in rivers is a critical environmental concern, with the accumulation of waste and pollutants threatening aquatic life, ecosystems, and human health. Numerous approaches have beed developed to address this issue, ranging from manual cleaning techniques to more sophisticated automated solutions. This literature survey reviews existing research on river cleaning technologies, remote-controlled system, and water quality monitoring, docusing particuularly on the interation of sensors such as the TDS sensor in monitoring water health.
Quanling Zhao and Jiawei Sun propose a research study focused on Manual and Traditional River Cleaning Methods [1]. Traditional river cleaning methods rely on manual labor or stationary mechanical systems, such as booms and nets, to collect surface debris. Studies by Xie et al. (2015) demonstrate the limitations of these methods, highlighting inefficiencies in covering large areas and addressing pollutants that are not visible, such as dissolved solids or chemicals. These methods are labor-intensive and fail to provide real-time data on water quality, which is essential for long-term environmental monitoring.
[2] Automation in Water Cleaning With advancements in automation, several systems have been designed to clean water bodies with minimal human intervention. Wang et al. (2017) developed an automated robot capable of navigating lakes and reservoirs to collect floating debris. Although effective in static water environments, the system lacked real-time water quality monitoring features, limiting its ability to assess the health of the ecosystem it was cleaning. This gap points to the need for integrating water quality sensors, such as the TDS sensor, to enhance the functionality of these systems.
[3]. Authors talked about a Remote-Controlled and Mobile-Based Systems. The integration of mobile-controlled systems for water cleaning and monitoring has gained popularity due to their flexibility and ease of operation. Singh et al. (2019) designed a mobile-controlled aquatic robot for water quality monitoring that could be operated through a smartphone application. This robot featured sensors to monitor pH, turbidity, and temperature, but lacked the ability to measure dissolved solids, which play a significant role in determining water quality. The inclusion of TDS sensors in modern designs can provide critical data on the concentration of dissolved substances, such as salts, minerals, and metals, which are important indicators of pollution.
Similarly, Li and Chen (2020) explored the use of mobile-controlled robots for plastic waste collection, focusing mainly on surface debris. While their system demonstrated the potential for integrating remote control with waste management, it did not include water quality sensors. Adding TDS sensors would have enabled the system to provide comprehensive environmental data, such as water hardness and contamination levels, in addition to removing physical waste.
[4] TDS sensors play a crucial role in evaluating water quality by Chauhan et al. (2021) explored the use of TDS sensors in monitoring water bodies affected by industrial pollution, demonstrating their importance in real-time assessment of water quality. measuring the concentration of dissolved solids in the water. High levels of TDS can indicate the presence of pollutants such as industrial chemicals, agricultural runoff, or organic matter, which may harm aquatic life and affect the usability of water resources. Research. Integrating TDS sensors into river cleaning robots offers a dual benefit: while the robot collects physical waste, it simultaneously monitors water quality. This data can inform decision-making about water treatment and conservation efforts. For example, Kumar and Sharma (2022) developed a mobile-controlled robot for hazardous water cleaning, but without real-time TDS monitoring, their system could not detect dissolved pollutants. By incorporating TDS sensors, river cleaning robots could provide a more comprehensive understanding of water health, aiding long-term environmental monitoring efforts.
[5] As research increasingly focuses on sustainable technologies, solar-powered robots for river cleaning have gained attention.Solar-Powered and Environmentally Sustainable Robots developed by Patel et al. (2021) for cleaning lakes, designed to reduce the carbon footprint of the cleaning process. While the robot successfully removed surface pollutants, it lacked advanced water quality sensors. Integrating a TDS sensor in such system would not only enhance the cleaning process but also allow for continuous monitoring of dissolved pollutants, thus providing a more holistic approach to environmental conservation.
Current Gaps and Opportunities Despite the progress made in automated water cleaning and the use of sensors for monitoring environmental conditions, there are still significant gaps in existing systems. Most robots are designed for surface cleaning, while water quality monitoring, particularly of dissolved solids, is often overlooked. The integration of TDS sensors into river cleaning robots can address this gap by offering real-time feedback on the health of the water, making it possible to detect pollution levels and take timely action.
Another key limitation is the reliance on predefined paths or static cleaning areas, which reduces flexibility and adaptability in real-world conditions. The integration of artificial intelligence (AI) and machine learning could enhance the adaptability of these robots, allowing them to optimize their cleaning routes based on real-time environmental data. Furthermore, while several studies have explored the use of renewable energy sources like solar power, these systems still face challenges with energy efficiency and storage, particularly in regions with inconsistent sunlight.
The literature shows significant advancements in automated river cleaning technologies, but there is a growing need for systems that combine physical waste removal with water quality monitoring. The integration of TDS sensors into mobile-controlled river cleaning robots represents a crucial development, enabling these systems to provide comprehensive data on water health while removing pollutants. This research builds on these advancements by offering an adaptable, eco-friendly, and efficient solution to river pollution that incorporates real-time water quality assessment.
III. WORKING MECHANISM
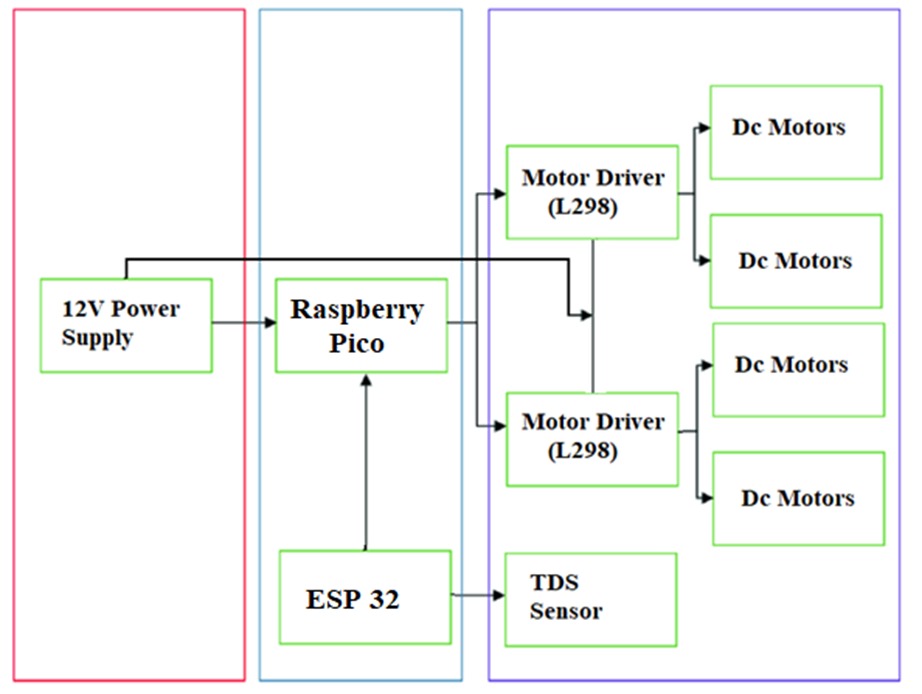
Fig 1- River cleaning Robot
- 2V Power Supply: This provides the necessary power to the system, ensuring that all the components, especially the motors and control units, receive sufficient voltage to operate.
- Raspberry Pi Pico: This is the main microcontroller in the system. It controls the motor drivers and communicates with the ESP32 and TDS sensor. The Raspberry Pi Pico takes inputs from the sensor and controls the motors through the motor drivers based on the data.
- ESP32: This is a microcontroller with Wi-Fi and Bluetooth capabilities. It is likely being used for wireless communication, possibly to send data from the TDS sensor or receive control commands remotely.
- TDS Sensor: This sensor measures the Total Dissolved Solids (TDS) in water, indicating water quality. The sensor sends the data to the Raspberry Pi Pico, which processes this information for further action.
- Motor Driver (L298): These motor drivers control the DC motors. The L298 is a dual H-Bridge driver, capable of driving two DC motors per module. The motor drivers receive commands from the Raspberry Pi Pico and convert them into appropriate electrical signals to control the speed and direction of the motors.
- DC Motors: The system has multiple DC motors that are controlled by the motor drivers. These motors could be part of a mechanical system that responds to the sensor data or a robotic platform.
A. Working of the System
1) Power Distribution
The 12V power supply is connected to both the Raspberry Pi Pico and the motor drivers. It ensures that the Pico and motors get the required voltage to operate.
2) Control Flow
The Raspberry Pi Pico is the central controller. It receives inputs from the TDS sensor, processes the data, and makes decisions about controlling the motors. The ESP32 may provide remote access/control for the system, sending or receiving data over Wi-Fi/Bluetooth. The Raspberry Pi Pico likely communicates with the ESP32 for instructions or reporting sensor data.
3) Motor Control
The Raspberry Pi Pico sends control signals to the Motor Drivers (L298) based on the sensor input or external commands via the ESP32.
The motor drivers then control the DC motors, adjusting their speed and direction depending on the signals received from the Raspberry Pi Pico.
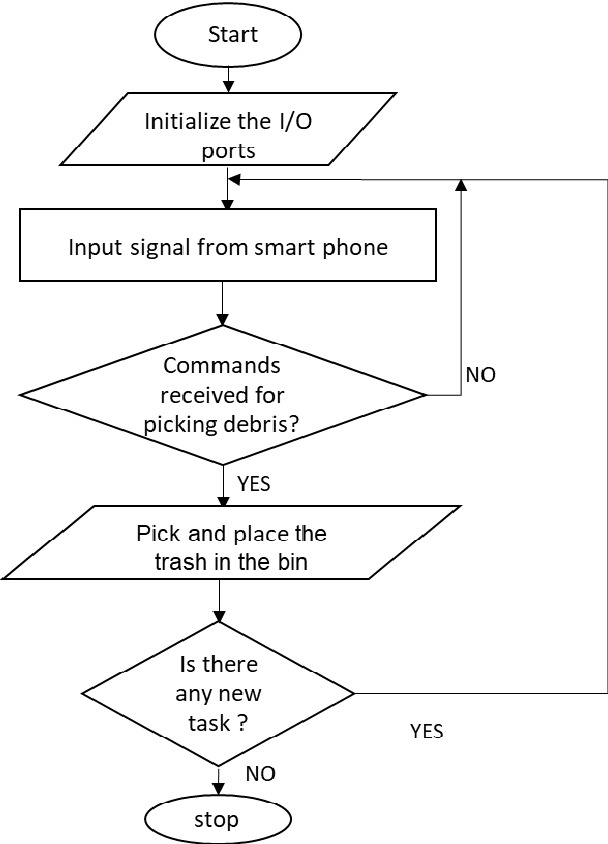
Fig.2 Mobile Controlled River Cleaning Robot
The flowchart outlining the process for controlling a robot or system that picks up debris via commands received from a smartphone. Here’s a breakdown of the flowchart:
- Start: The process begins.
- Initialize the I/O ports: The input/output ports are initialized, likely for communication with the smartphone or other sensors.
- Input signal from smartphone: The system awaits a signal from the smartphone, likely to provide commands or instructions.
a) Commands received for picking debris?: A decision point where the system checks if any commands have been received to pick debris.
If NO, it loops back to check for a signal.
If YES, it moves forward.
b) Pick and place the trash in the bin: The robot/system picks up the debris and places it in the bin.
c) Is there any new task?: A check to determine if there are any further tasks.
If YES, the process loops back to receive new commands.
If NO, the process stops.
IV. ADVANTAGES
- Efficient Debris Removal: The robot can clean floating debris from rivers and lakes quickly and efficiently, reducing the manual labor required and improving operational speed.
- Remote Control Flexibility: With mobile control via Bluetooth, users can navigate the robot remotely, allowing precise movement in polluted areas, making it versatile in different environments.
V. SCOPE OF PROJECT
The "Mobile Controlled River Cleaning Robot" project focuses on designing a robot that can efficiently remove floating waste and pollutants from rivers. Operated via a mobile device, the robot uses wireless communication for remote control and is equipped with sensors for navigation and waste collection. Its key components include a floating body, propulsion system, and a waste collection unit. The project aims to reduce water pollution and provide an automated solution for cleaning rivers, improving environmental conservation efforts by addressing the growing problem of aquatic waste.
VI. ACKNOWLEDGMENT
We extend our sincere gratitude to the Department Head, prof. Prachi Deshpande, project guide, prof. Umesh Phiske for their constant support and valuable guidance during the course of our project. We are also grateful to Prof. Bhausaheb Shinde, the project coordinator, and Principal Dr. Omprakash Rajankar for their unwavering encouragement and assistance.
Furthermore, we would like to express our appreciation to the entire staff and our fellow classmates who played a significant role in our achievements. Their availability and continuous encouragement have been invaluable to our success.
Conclusion
In conclusion, the development of a mobile-controlled river cleaning robot integrated with TDS monitoring capabilities offers an innovative solution to combat water pollution effectively. This project combines the functionality of debris removal with real-time water quality assessment, providing a holistic approach to environmental conservation. By enabling timely interventions based on accurate, real-time data, the system enhances pollution management in water bodies. While challenges such as battery limitations and sensor maintenance exist, the advantages of this dual-functionality system significantly contribute to the preservation of aquatic ecosystems.
References
[1] Pal, R., Sarkar, R., Ghosh, S. K., & Mukhopadhyay, S. (2019). Design and development of autonomous river cleaning robot using computer vision and machine learning techniques. Measurement, 145, 654-664. [2] Jadhav, S., & Parvat K. (2018). River cleaning system using robotic technology. International Journal of Engineering Research and Technology, 11(10), 1452-1456. [3] Singh, S. K., & Pandey, R. K. (2019). River cleaning robot: A review. Journal of Applied and Natural Science, 11(4), 1012- 1019. [4] Sharma, A., Gupta, M., & Kumari, N. (2018). Design and fabrication of river cleaning robot. International Journal of Engineering Science and Computing, 8(10), 15694-15699. [5] Prajapati, R. P., & Choudhary, R. (2021). Review of river cleaning robots: recent developments and challenges. Journal of Advanced Research in Production and Industrial Engineering, 4(2), 1-12. [6] J. Cao, D. Lin, Y. Sun, X. Zhang, \"Design and Implementation of a GPS Guided River Cleaning Robot,\" 2021 IEEE International Conference on Mechatronics and Automation (ICMA). [7] T. Bhattacharya, S. Gopalakrishnan, S. Karthik, G. Kannan, \"Development of an Autonomous River Cleaning Robot,\" 2019 International Conference on Robotics, Automation and Communication Engineering (RACE). [8] S. H. Lee, S. Lee, S. H. Kim, K. Y. Kwon, \"Development of a River Cleaning Robot using a GPS and Inertial Navigation System,\" Journal of Mechanical Science and Technology, vol. 30, no. 10, pp. 4719-4725, 2016. [9] A. M. A. Elaziz, M. A. El-Sayed, M. A. Ali, \"Design and Control of a River Cleaning Robot using GPS and Vision Techniques,\" International Journal of Automation and Control Engineering, vol. 4, no. 2, pp. 72-80, 2015. [10] Y. Wang, F. Gao, L. Sun, Y. Zhao, \"Design of a River Cleaning Robot based on GPS and Wireless Communication,\" 2014 IEEE International Conference on Mechatronics and Automation (ICMA).
Copyright
Copyright © 2024 Kajal Jagtap, Sneha Gade, Tanishka Kate, Dr. B. E. Shinde, Prof. Umesh Balkishan Phiske. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET64438
Publish Date : 2024-10-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online