

Ijraset Journal For Research in Applied Science and Engineering Technology
Modelling and Analysis of Unmanned Aerial Vehicles (UAV’s) for Medical Applications
Authors: Shreya Muppidi, Sathvika Manchala
DOI Link: https://doi.org/10.22214/ijraset.2023.54827
Certificate: View Certificate
Abstract
The need for unmanned aerial vehicles in our case hexacopters is broadly increasing in the field of aerospace and medical technology. It is significant to make them strong and robust for them to operate in rough and harsh environments to overcome failures while flying as o respond to emergencies and disasters. The design analysis and modelling of the physical structure play a major role in these vehicles as they are capable of hovering over small areas. For the drone to fly in unexpected weather conditions and handle a certain amount of weight keeping in mind the safety of the object’s weight is a complex problem statement. And for the drone to have a stable and steerable fly until it reaches its destination, the object being carried along must be fixed at a centric position so that the wobbling of the drone can be controlled. As a result, the main goal of this project is to fabricate a drone which can deliver medicines, blood samples and organs to the needed. It can also be equipped with cameras and sensors to collect and transmit data, allowing healthcare professionals to remotely monitor patients and track the progress of their treatment. To observe and predict climate changes at a specific altitude, a thermally insulated medical box is used for carrying medicines, vaccines, etc to deliver supply goods.
Introduction
I. INTRODUCTION
Drones, also known as unmanned aerial vehicles (UAVs), are aircraft that are operated remotely or autonomously. They are available in different sizes and shapes, with some being as small as a bird and others being as large as a commercial airplane. These vehicles are equipped with a variety of sensors, cameras, and other technology, allowing them to collect and transmit data, navigate, and avoid obstacles to perform a variety of tasks.
Hexacopters are equipped with six motors and six locked propellers to generate lift. Two of the propellers rotate in the clockwise direction known as pusher propellers and the other two rotate in the counter-clockwise direction known as normal propellers. These are attached with brushless DC motors (BLDC) with each propeller attached to one motor. Coordination of these motors with respect to their direction of revolving will cancel all the forces and maintains the speed to be the same.
Medical supply drones can be used to deliver medical equipment to remote or underserved areas, improving access to healthcare for people who may otherwise have limited options. These drones can also be used to respond to emergencies and disasters, providing a rapid means of delivering medical supplies and personnel to the scene. In addition to their use in the delivery of medical supplies and equipment, medical drones can also be used for transportation of medical personnel, such as doctors and nurses, to and from hospitals or other medical facilities. This can greatly reduce response times and improve the efficiency of medical care, especially in cases where ground transportation is not possible or would take too long to commute.
II. MEDICAL SUPPLY
Drones have the potential to improve the delivery and access of healthcare to millions of people who need immediate medical treatment or supplies especially in areas that are undeserved by traditional health care systems. Drones can be used to deliver a variety of medical supplies and equipment, including:
- Medications: Drones can be used to deliver essential medications, such as antibiotics and painkillers, to patients in remote or hard-to-reach areas.
- Vaccines: Drones can be used to deliver vaccines quickly and efficiently to remote areas, helping to improve vaccination rates and reduce the spread of infectious diseases.
- Personal Protective Equipment (PPE): Drones can be used to deliver PPE, such as masks, gloves, and gowns, to healthcare workers and other front-line responders during covid time or any other potential viruses.
- Medical Equipment: Drones can be used to deliver medical equipment, such as defibrillators, to remote or hard-to-reach areas, where access to this equipment may be limited.
- Blood Products: Drones can be used to transport blood, from cities to rural health centres, which might be required for surgery or delivery.
- Human Organs and Tissue: In the future, it may be possible to use drones to transport human organs and tissue for transplantation.
III. METHODOLOGY
A. Material of the Frame
This is a vital component of any drone and that is why using a strong and lightweight material is essential, especially for a drone carrying six motors. Different materials are used in the framing of a hexacopter such as carbon-fibre frame, aluminium frame, and wooden frame. The carbon-fibre frame is costly but best for a hexacopter, as it absorbs all the vibrations produced by the motors which provide better stability and balance to the drone, also suitable for critical climate conditions. Thus, in our case we are using CFs as the material which is considered rigid for the manufacturing of the drone.
B. Autonomous Navigation
Autonomous navigation in drones involves the use of various sensors and algorithms to allow the drone to fly and navigate without human intervention by following a programmed route. Some of the technologies that are commonly used for autonomous navigation in drones include Computer vision, LIDAR, GPS, and IMUs. The technology we are using in defining the path of the travel is Global Positioning System (GPS) which are used in determining the location time and speed required for a safe fly.
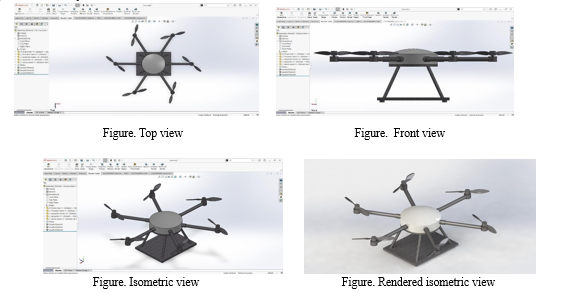
IV. 3D MODEL AND DESIGN USING SOLIDWORKS
Modelling a hexacopter involves creating a mathematical model that accurately describes its physical behaviour and allows for simulation and analysis of its flight characteristics. Here are the general steps involved in creating a hexacopter model:
- By defining the physical properties of the hexacopter, such as its mass, size, and shape. These properties will determine how the hexacopter responds to external forces.
- By identifying the components of the hexacopter propulsion system, including the motors, propellers, and ESCs.
- By determining the equations of motion for the hexacopter, which describe how the hexacopter position, velocity, and orientation change over time in response to external forces.
- By using the equations of motion to develop a simulation of the hexacopters flight behaviour. This simulation can be used to analyse the hexacopters stability.
- Validate the model by comparing the simulation results to actual flight data. This step may involve adjusting the model to improve its accuracy.
V. STRUCTURAL ANALYSIS
A. Procedure
The static structural analysis of certain parameters has also been done using the ANSYS software assuming a weight of 20 N for the medical equipment being placed on the drone tray. The drone along with the weight of the object can fly and operate if the parameter values do not exceed their maximum limit, otherwise deformation might take place. In ANSYS, structural analysis can be performed using the Structural module, which is a computer aided engineering (CAE) tool that allows users to analyse the performance of a design under different load conditions.
- Import the Drone Design into ANSYS: The initial step is to import the drone design into ANSYS as a 3D model.
- Meshing: After importing the drone design into the software, the appropriate mesh for the model is generated. ANSYS provides an automated meshing software that produces a mesh to prove its accuracy and efficiency.
- Define the Loads and Boundary Conditions: Then the loads and boundary conditions that the drone design will be subjected to during the structural analysis must be defined.
- Assign Materials to the Model: Assign materials to the different parts of the drone model in order to accurately simulate the structural behaviour of the design. In this project, carbon fibre material is chosen.
- Set up the Analysis: Once the loads and boundary conditions have been assigned and materials to the model, setup the structural analysis in ANSYS by selecting the type of analysis that is needed to be performed.
- Run the Analysis: Once the set up the analysis has been done, run the simulation by clicking the "Solve" button. This will generate a report that includes the results of the analysis.
B. Meshing Details
In our case we use a combination of Tetra and Hexahedral meshing forming a hybrid mesh that combines both types of elements along with their advantages. A mesh is made up of nodes and elements to simulate a wide range of physical interactions thus this design contributes around 102893 nodes. To improve the accuracy of the design the elements are made smaller but are high in number i.e., 52832 elements.
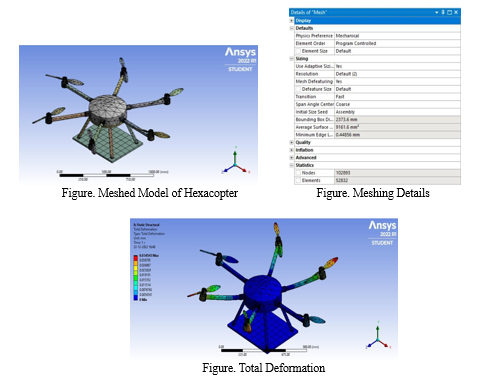
The total deformation of a hexacopter refers to the overall amount of displacement or distortion that occurs in the structure of the hexacopter when it is subjected to external loads. This is calculated by measuring the change in the position or shape before and after it is loaded which seems to be occurring slowly throughout the length of the drone arms to the tip of the propellers undergoing maximum deformation. (RED being the maximum while DARK BLUE being the minimum limit)
C. Weight Approximation
It is the process of estimating the weight of an object based on its size, shape, and material properties. To approximate the weight of a drone and its components, a variety of methods are used, including density-based methods, empirical equations, and computer simulations. In addition to estimating the weight of individual components, we considered the weight distribution of the drone. This surely includes the weight of the payload, batteries, and other equipment, as well as the balance and centre of gravity of the aircraft. By carefully considering the weight of a drone and its components, engineers can optimize its design and ensure that it meets the desired performance.

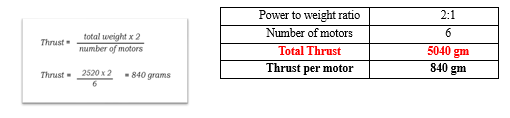
D. Thrust Approximation
Thrust is a force that is generated by the propulsion system of a drone, which provides the necessary power for the drone to move through the air. To give a rough estimate of the power consumption, we can consider a small consumer-grade drone with a weight of around 500 grams and a flight time of around 20 minutes. Based on this, we can estimate that such a drone would consume around 200 to 300 watts of power during flight.
However, this is just a rough estimate and the actual power consumption could be higher or lower depending on the specific characteristics of the drone. It is also important to note that the power consumption of a drone will increase as it flies faster, carries a heavier payload, or performs more demanding manoeuvre. As a result, the power consumption of a UAV can vary significantly depending on its usage.
E. Drone Flight Time
Time of Flight is a measurement technique used to measure the time it takes flight or sound signal to travel from a source to a target and back. In the context of drones, it is used to measure the distance between the drone and its environment, enabling the drone to better navigate and interact with its surroundings.
This technology can also be used to measure the speed of the drone. The average flight time of a drone can be between 15- 20 minutes although it differs from model to model as higher flight time means more amount of time in the air which extends its usability.

VI. FABRICATION
A. Assembly
- Gather all the necessary parts: This includes the frame, motors, electronic speed controllers (ESCs), flight controller, battery, propellers, and other accessories.
- Build the frame: Follow the instructions provided with the frame to assemble it, making sure to attach the arms securely.
- Mount the motors: Mount the motors to the arms of the frame, making sure they are aligned correctly.
- Install the ESCs: Connect the ESCs to the motors and mount them to the frame.
- Connect the flight controller: Connect the flight controller to the ESCs and other components, such as the GPS module and radio receiver.
- Mount the battery: Mount the battery securely to the frame, making sure it is balanced.
- Attach the propellers: Attach the propellers to the motors, making sure they are facing in the correct direction.
- Configure the flight controller: Use the software provided with the flight controller to configure it.
- Perform a pre-flight check: Check all the connections and settings, and perform a test flight to make sure everything is working correctly.

B. Calibration of Drone
Once the hexacopter is assembled and programmed, it must be tested and calibrated. This involves testing the hexacopters sensors and motors, as well as ensuring that the programming is working correctly. It is important to ensure that the hexacopter is stable and that it flies smoothly so that the hexacopter can fly for a long period of time without any issues. If there are any problems, it is important to troubleshoot and fix them before flying the hexacopter. Additionally, the hexacopter should be tested in a variety of environments to ensure its performance. In order to carry out the calibration of the components of the drone, there must be a software involved, in this case we used a software called Mission Planner for Autopilot applications. Calibrating the Electronic Speed Controllers (ESCs) for a hexacopter is an important step in ensuring that the motors are running correctly and the drone is stable in flight.
VII. ACKNOWLEDGEMENT
We wish to express our deep sense of gratitude to Dr. B. Chennakesava Rao, Director for Advancement & Professor of Mechanical Engineering and Dr. N. Kiran Kumar, Assoc. Professor of Mechanical Engineering and Mr. Ch. Naveen Reddy, Asst. Professor of Mechanical Engineering for their constant encouragement and suppor. We would also like to thank our dear classmates A. Sharan and Y. Jaswanth who have been a great helping hand throughout the process. Lastly, we cannot ignore the support given by our parents who have always been inspirational.
Conclusion
The main factor in determining the performance of the aircraft is given by the approximation of the thrust produced by the motors of the hexacopter. According to our calculations each motor provides a thrust of 840 grams while the entire system provides about 5040 grams relative to the total weight of the drone. In the static analysis of the drone, it is noticed that the deformation of the hexacopter inclines along the centre hub to the tip of the propellor blade. The flight time calculated for our hexacopter according to our battery capacity and motor, is theoretically found to be 11 minutes while practically it flew around 9 minutes. In this regard, one benefit of drones could be to deliver such sample results in a matter of minutes if not hours and aid the diagnosis and subsequent treatment. Overall, medical drones have the potential to revolutionize healthcare delivery, particularly in underserved or remote areas. However, there are also challenges to the use of medical drones, including regulatory issues, cost, and safety concerns. Despite these challenges, the use of medical drones is growing rapidly, with many organizations and governments around the world exploring their potential to improve healthcare delivery.
References
[1] Frank, Adrian, James McGrew, Mario Valenti, Daniel Levine, and Jonathan How. \"Hover, transition, and level flight control design for a single-propeller indoor airplane.\" In AIAA Guidance, Navigation and Control Conference and Exhibit, p. 6318. 2007. [2] Yanguo, Song, and Wang Huanjin. \"Design of flight control system for a small unmanned tilt rotor aircraft.\" Chinese Journal of Aeronautics 22, no. 3 (2009): 250-256. [3] Muraoka, Koji, Noriaki Okada, and Daisuke Kubo. \"Quad tilt wing vtol uav: Aerodynamic characteristics and prototype flight.\" In AIAA Infotech@ Aerospace Conference and AIAA Unmanned... Unlimited Conference, p. 1834. 2009. [4] Ducard, G., and Minh-Duc Hua. \"Discussion and practical aspects on control allocation for a multi-rotor helicopter.\" International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 38, no. 1/C22 (2011): 95-100. [5] Salim, Nurul Dayana, Dafizal Derawi, Shahrum Shah Abdullah, Saiful Amri Mazlan, and Hairi Zamzuri. \"PID plus LQR attitude control for hexarotor MAV in indoor environments.\" In 2014 IEEE International Conference on Industrial Technology (ICIT), pp. 85-90. IEEE, 2014. [6] Samarathunga, Wasantha, Guangwei Wang, and Shiqin Wang. \"Evaluation of Power Conversion on Heavy Payload Tethered Hexarotors: A Strategic Approach.\" International Journal of Engineering Research and Applications (IJERA), ISSN: 2248-9622, December 2015. [7] Bhandari, S., Suman Pathak, Ravi Poudel, R. K. Maskey, P. L. Shrestha, and Binaya Baidar. \"Design and Development of Hexa-copter for Environmental Research.\" In 11th International Conference on ASIAN Community Knowledge Networks for the Economy, Society, Culture and Environmental Stability. 2016. [8] Suprapto, Bhakti Yudho, M. Ary Heryanto, Herwin Suprijono, Jemie Muliadi, and Benyamin Kusumoputro. \"Design and development of heavy-lift hexacopter for heavy payload.\" In 2017 International Seminar on Application for Technology of Information and Communication (iSemantic), pp. 242-247. IEEE, 2017.
Copyright
Copyright © 2023 Shreya Muppidi, Sathvika Manchala. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54827
Publish Date : 2023-07-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online