

Ijraset Journal For Research in Applied Science and Engineering Technology
Multi-Functional Arduino Robot “Anima”: Review
Authors: Abhijeet Sah, Aasanti Muppidwar, Akshay Raut, Janhvi Nakhate, Aditya Gavande, Priyanka Kadam
DOI Link: https://doi.org/10.22214/ijraset.2023.56057
Certificate: View Certificate
Abstract
In 21st century, Robots are playing a very important role for the development of human and various technologies that are being used in our day-to-day life. This review paper is on the robot made by the same Team. Robots are being used in various sectors like industrial, transportation, medical, space exploration programs, etc. and also by various E-commerce companies like Amazon, Flipkart, Alibaba for the delivery of packages to the consumers. Tracking, automation and obstacle avoidance are the three most important features that is needed for every automated mobile robots. In this review there is a robot named ‘ANIMA’ which runs automatically on four wheels which all are controlled by Arduino UNO (Microcontroller) , Ultrasonic Sensor, Bluetooth module. Programming is done by Arduino Software (IDE) with version of v2.2.1 . It is a wheeled robot which can also be controlled by bluetooth module by any external controllers or smartphone.
Introduction
I. INTRODUCTION
Robotics is an Electro-Mechanical and very advance branch of Engineering. There are several mobile robots that can be divided into several categories that consists of wheeled robot, crawling robot, legged robot and flying robot. This robot is that consists of wheeled autonomous robot based on Arduino . Obstacle avoidance is the primary requirement of any autonomous robot which allows the robot to navigate in an unknown environment by avoiding obstacles in it’s path. This Robot senses obstacles in its path, stops and then avoids it by turning in another direction.
Robots moves in the surroundings using various methods which are obstacle avoidance, edge detection, line following, wall-following. One of widely used robot that uses the method of wall-following for a floor cleaning robot to reduce human efforts. This robot ANIMA uses more general and commonly known method for avoidance of obstacle is based on edge detection. A variety of sensors are available for this purpose which includes ultrasonic sensor, motion sensor, etc. Ultrasonic sensor is used to detect an obstacle ahead of it, and then it sends information to the Arduino (microcontroller) which in turn Arduino gives the required command to move the robot.
II. LITERATURE SURVEY
- “Performance Assessment of an Integrated RadarArchitecture for Multi-Types Frontal ObjectDetection for Autonomous Vehicle”
A research by Fakhrul Razi Ahmad Zakuan, Umar Zakir Abdul Hamid, Dilip Kumar Limbu, ,Hairi Zamzuri and Muhammad Aizzat Zakaria of ∗Mootiva Pte Ltd, Singapore proposed that a hazard-free autonomous vehicle (AV) navigation requires incorporated of three radars, to enable a reduced amount of blind spot area for the frontal object detection. They used smart micro radar for obstacle detection. The coordinates of the objects detected by all of the Radars are further required to be projected in the same space of a Cartesian plane. To enable for the detected obstacle Projection, the transition of the current position of radars to the center of the vehicle is computed.
2. “Obstacle avoidance of mobile robots using Modified artificial potential field algorithm” by Seyyed Mohammad Hosseini Rostami, Arun Kumar Sangaiah, Jin Wang and Xiaozhu Liu.
The proposes a modified artificial potential field (APF) method for improving the control and navigation Of intelligent mobile robots. The goal is to avoid collision with fixed obstacles, reach the target in an Optimal path, and avoid getting stuck in local minimums. This modified algorithm aims to address the Limitations of the traditional APF algorithm, particularly in situations where obstacles are near the target. The proposed algorithm is evaluated through simulation results using MATLAB software, showing its Superiority over existing solutions.
3. “Obstacle Avoidance Strategy for Mobile Robot Based on Monocular Camera”
By Thai-Viet Dang , from Department of Mechatronics, School of Mechanical Engineering, Hanoi University of Science and Technology, Hanoi 10000, Vietnam and Ngoc-Tam Bui from Shibaura Institute of Technology, Saitama 337-8570, Japan. This research paper proposes a real-time obstacle avoidance strategy for mobile robots with a monocular camera. The approach uses a binary semantic segmentation FCN-VGG-16 to extract features from images captured by the monocular camera and estimate the position and distance of obstacles in the robot’s environment. Segmented images are used to create the frontal view of a mobile robot.
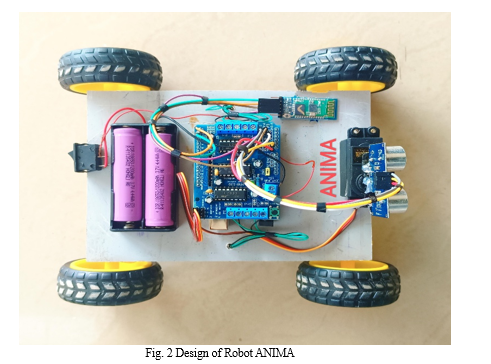
III. COMPONENTS
This Multifunctional Arduino Robot “ANIMA” contains various components for the proper working of obstacle avoidance are as follows:
- Arduino UNO R3
- L 293D Motor Driver
- HC SR04 Ultrasonic Sensor
- Bluetooth module (HC-05) 6 pin
- Servo motor (MG995)
- Gear Motors
IV. WORKING
The working of the Robot “ANIMA” has been explained below in brief :
A. Obstacle Avoiding
In this mode of robot. The robot trying to avoid obstacle in front of ultrasonic sensor. The servo motor rotates 90? left and then 90? right by this also the ultrasonic sensor can be move according to servo motor direction. The ultrasonic sensor gives input to the Arduino Uno by checking the obstacles in left and right with the help of servo motor. Then Arduino Uno gives command to motor driver and motor driver drives the motors in particular direction respectively. So that it can get an perfect turn properly. This process is runs in a loop, so that the robot doing this again and again until the switch is off.
B. Bluetooth Controller
In this mode of robot. The input is taken by the bluetooth module which is mounted in right side on the robot. We can control the robot by using bluetooth signals by 15 m near to device. We can give input with the help of an application our Android or iOS device. The application can be installed by Google Play Store or an app store. The app gives input to bluetooth module and this passes towards the Arduino Uno. Arduino Uno understands the instructions and gives input to motor driver and hence it gives proper output to motors and it get perfect turns. Hence we got a output by the motion of robot.
V. FUTURE SCOPE
The concept of obstacle avoidance in mobile robots has a vast scope for future research and development. Some of the area that can explore further are :
- Machine learning-based Algorithms (AI): The use of machine learning algorithms can help in improving the accuracy and efficiency of obstacle detection and avoidance.
- Autonomous Navigation: The robot can be made more autonomous by developing algorithms that allow it to navigate through complex environments without human intervention.
- Swarm Robotics: The concept of swarm robotics can be applied to mobile robots for collective obstacle avoidance and navigation.
- Real-time Mapping: Real-time mapping can help in understanding the geography of the environment which can be further used for better obstacle detection and avoidance.
Conclusion
The obstacle avoiding robot “Anima” can be used in various applications such as floor cleaning, surveillance, delivery of packages, also as tourist guide and many other applications. The use of Arduino UNO, Ultrasonic Sensor, Motor Driver and Bluetooth module makes it easy to program and control the robot. The Servo motor has been used for rotating the sensor and the robot is able to move by using four geared motors. However, the robot has limitations such as its inability to navigate in complex environments, poor in detecting the tilt corners and its limited range of obstacles. The range of the ultrasonic sensor is near about 400 cm. Although is perfectly avoiding the obstacles coming in its path.
References
[1] Performance Assessment of an Integrated Radar Architecture for Multi-Types Frontal Object Detection for Autonomous Vehicle” is a research by Fakhrul Razi Ahmad Zakuan, Umar Zakir Abdul Hamid, Dilip Kumar Limbu ,Hairi Zamzuri, and Muhammad Aizzat Zakaria. Published on researchgate.net on October 2018. [2] “Obstacle avoidance of mobile robots using Modified artificial potential field algorithm” by Seyyed Mohammad Hosseini Rostami, Arun Kumar Sangaiah, Jin Wang and Xiaozhu Liu is a research paper published on 18 March 2019 on EURASIP Journal on Wireless Communications and under article no. 70. [3] Obstacle Avoidance Strategy for Mobile Robot Based on Monocular Camera” By Thai-Viet Dang is a research paper published on 19 April 2023 on MDPI Journals under volume 12 issue 8 . [4] Obstacle Avoiding Robot: A Review by Amit Kumar Bharti, Arvind Kumar Bharati, Asharaf Raza, Ashwani Kumar, Aamir, Final Year B. Tech Students, Department Of Mechanical Engineering, Babu Banarasi Das Institute Of Technology and Management, Lucknow is a review paper published on IJRASET on May 2022 under volume 10 issue 5.
Copyright
Copyright © 2023 Abhijeet Sah, Aasanti Muppidwar, Akshay Raut, Janhvi Nakhate, Aditya Gavande, Priyanka Kadam. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56057
Publish Date : 2023-10-08
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online