

Ijraset Journal For Research in Applied Science and Engineering Technology
Multi-Purpose Autonomous Agricultural Robot
Authors: Mrs. G Madhavi, Nerella Prathyusha, P Meghana, K Varshitha Reddy, P Akshitha Aishwarya
DOI Link: https://doi.org/10.22214/ijraset.2024.60394
Certificate: View Certificate
Abstract
The machine designed here for agricultural forms provides excellent service to the farmers while planting the seeds. Because this machine performs 4 important functions such as, 1. Plough tool: The plough is known as nagali or Nagal in Indian languages, and it is used to tillage the soil, tillage is the basic operation in farming. It is done to create favourable conditions for seed placement. This is done mainly with a plow. 2. Seed planting mechanism. 3. Soil levelling mechanism. 4. Water sprinkling mechanism. All these 4 mechanisms are arranged to a single motorized body that performs the above four functions one after another in a sequence, and therefore it is called a Multi-purpose Autonomous Agricultural Robot. Since the machine is designed as compact and portable, it is controlled through a remote. The mechanical performance of this seed planting machine purely depends on the processing unit designed with a microcontroller chip. This chip is programmed to run the machine in all directions, after positioning the mechanism through a remote the machine advances in one direction and the various mechanisms arranged over the moving body perform four above-mentioned functions one after another, while performing a specific function, the machine will be stopped for a second and after completing the task it moves further to perform another task. Here the machine will be stopped for a while for two functions only, one is while planting the seed and another one is while sprinkling the water over the seed-covered soil. With the help of a remote-control unit, the machine can be moved in all directions, once the machine is positioned in one direction for planting the seeds and by activating the start button from the same remote, the machine starts moving in the forward direction to plant the seeds one after another in that particular row. This process continues until the stop button is activated from the remote. To plant the seeds in the second row, again the machine must be aligned through remote. The distance between the two seeds can be programmed, but since it is a prototype module fixed distance is maintained [2].
Introduction
I. INTRODUCTION
The growth or development of any nation in the world is purely depends up on the agriculture production. If proper machinery is used in this field, accuracy in the forming and quality in the production can be achieved. Traditional methods of sowing seeds manually and other activities like ploughing, seeding, water pouring, soil leveling, etc. are done manually that consume lot of time and also it may not be accurate because of human errors. Therefore here a 4- in-one machine is designed for doing above jobs automatically. With the help of a remote controlled unit designed with 4 control keys entire machine movements can be controlled and the person who is operating this machine need not to get in to the field [1].
Maintaining uniformity in seed planting can increase the sowing efficiency, thereby it is essential to adapt latest agricultural machines for various applications, in this regard to overcome manual problems, and to save time, in addition to maintain accuracy, human involvement must be reduced and all these activities must left-over to the machines. The main purpose of developing this machine is to enhance the technology in the field of agriculture, to prove the theme practically a prototype module will be constructed for demo purpose.
The machine designed here is quite useful for the large cultivated areas, since it is a prototype module, the machine is designed to plant seeds one after another in one row, but when it is converted into an engineering module, the machine can plant multiple seeds in multiple locations simultaneously. Similarly other activities can also be implemented simultaneously, there by many acres can be planted with seeds within less time.
II. PROBLEM STATEMENT
In contemporary agriculture, the demand for increased efficiency, sustainability, and precision has driven the need for innovative technological solutions. Traditional farming methods face challenges in meeting these demands due to factors such as labor shortages, resource limitations, and the imperative for sustainable practices. To address these issues, our project focuses on the development of a Multipurpose Autonomous Agricultural Robot (MAAR) capable of autonomously performing critical tasks including plowing, seeding, water pouring, and soil leveling.
III. FORMULATION OF OBJECTIVES
The main objective of the project is to develop a hardware prototype and software simulation for an automated sowing machine, aimed at significantly enhancing agricultural efficiency and productivity. By leveraging modern technology, the automated sowing machine aims to streamline the traditional farming process and alleviate the burden on farmers.
- Plough Tool Integration: The integration of a plough tool serves to prepare the soil and create optimal conditions for seed placement. By effectively breaking up compacted soil and removing debris, the plough tool ensures a fertile and receptive planting environment.
- Seed Planting Mechanism Enhancement: The seed planting mechanism is designed to precisely dispense seeds at predetermined intervals along the planting row. This mechanism ensures uniform seed distribution and spacing, maximizing planting efficiency and promoting even crop growth.
- Soil Leveling Mechanism Implementation: The soil leveling mechanism plays a crucial role in ensuring uniformity and consistency in soil surface elevation after seed planting. By leveling the soil surface, this mechanism facilitates optimal seed-to-soil contact and enhances seed germination rates.
- Water Sprinkling Mechanism Integration: The water sprinkling mechanism complements the seeding process by providing essential moisture to newly planted seeds. By moving the machine a short distance forward and delivering water directly to the seed location, this mechanism promotes rapid seed germination and early crop establishment.
The project aims to enhance the operational efficiency and ease of use of the automated sowing machine by incorporating advanced control systems and remote functionality. The utilization of the 89C2051 microcontroller as the main processing unit enables seamless communication and coordination of the various mechanisms within the machine. By acquiring command signals from the remote control unit, the microcontroller orchestrates the operation of the plough tool, seed planting mechanism, soil leveling mechanism, and water sprinkling mechanism with precision and accuracy.
IV. LITERATURE SURVEY
These three research papers that focus on different approaches to implement Multi Purpose Autonomous Agricultural Robot.
Chandana R, Nisha M, Pavithra B, Suresh, Nagashree R N worked on "A Multipurpose Agricultural Robot for Automatic Ploughing , Seeding and Plant Health Monitoring", 2020. This paper discusses the development and implementation of a multipurpose agricultural robot capable of performing tasks such as ploughing, seeding, and plant health monitoring automatically.
Hari Mohan Rai, Manish Chauhan, Himanshu Sharma, Netik Bhardwaj, Lokesh Kumar worked on "AgriBot: Smart Autonomous Agriculture Robot for Multipurpose Farming Application Using IOT", 2022. This paper is about the design and deployment of AgriBot, a smart autonomous agricultural robot that utilizes IoT (Internet of Things) technology.
Aditya Sharma, Dr. Pooja Tripathi worked on "Artificial Intelligence in Agriculture: A Literature Survey", 2021.
V. EXISTING SYSTEM
The existing system for this project involves traditional farming methods that rely heavily on manual labor for tasks such as ploughing, seeding, watering, and soil leveling. These methods are time-consuming, labor-intensive, and prone to human error, leading to inconsistencies and inefficiencies in agricultural production. Limited technological integration hinders precision and scalability in farming operations. Challenges such as labor shortages, resource constraints, and the need for sustainable practices underscore the urgency for innovative solutions in contemporary agriculture. Existing technologies lack the versatility and intelligence required to autonomously perform a range of agricultural tasks efficiently. Safety concerns persist due to the lack of advanced safety mechanisms, potentially endangering both farmers and equipment during operation.
VI. PROPOSED SYSTEM
There is a growing demand for robotic platforms that can seamlessly execute various farming operations while enhancing precision, resource optimization, and sustainability. The proposed Multipurpose Autonomous Agricultural Robot (MAAR) aims to address these challenges by integrating cutting-edge technologies in robotics, sensing, and control. Through features such as autonomous navigation, precision ploughing, smart seeding, targeted water pouring, and soil leveling technology, MAAR seeks to revolutionize traditional farming practices and provide farmers with a reliable, efficient, and sustainable solution for diverse agricultural tasks. Enhanced scalability and adaptability enable the robot to operate efficiently across diverse agricultural landscapes and cropping systems.
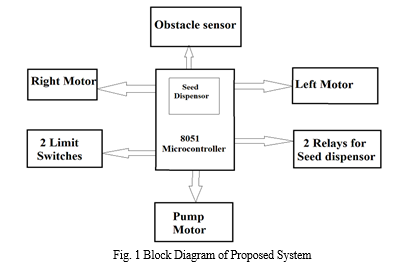
VII. BLOCK DIAGRAM
This unit designed with 89c2051 microcontroller chip is programmed such that it generates 6 different command codes according to the activated control keys. These six control keys are interfaced with the microcontroller as input information source keys, whenever any key is activated, its corresponding digital code in 8 bits will be generated and delivered through its data output pin. In this IC, pin no. 3 is the data transmitting pin.
Likewise the chip is programmed to generate six different codes and depending up on the activated key the chip can identify it, because that particular key input pin will be grounded momentarily. As the processing chip is aimed to encode the data, internally it generates 8-bit code in the form of 1’s and 0’s.
The output of controller chip is fed to the input pin of RF transmitter. This device generates a high frequency of 433MHz which is used as carrier frequency, now the controller output (digital data) is fed to this high frequency as a modulated signal, this signal mixed with carrier signal and delivers through antenna. When the signal is delivered through antenna, the digital signal will be super imposed over the carrier and transmitted as modulated signal, means the carrier holds the digital code signal and carries to its destination, i.e. receiver. The following is the description of RF communication system.
The RF signal transmitted by the transmitter is detected and received by this section. This binary encoder data is sent to the decoder for decoding the original data. The receiver receives an RF signal, converts the RF signal to an IF signal, and then converts the IF signal to a base band signal, which is then provided to the base band processor. The RF receiver is coupled to the antenna and includes a low noise amplifier, one or more intermediate frequency stages, a filtering stage, and a data recovery stage. The low noise amplifier receives an inbound RF signal via the antenna and amplifies it. The RF receiver used is RWS-434. This RF receiver receives RF signal, which is in the frequency of 434.92MHz and has a sensitivity of 3μV. The RWS-434 receiver operates from 4.5 to 5.5 volts DC, and has both linear and digital outputs.
The ATMEL AT89C2051 is a low power, higher performance CMOS 8-bit microcomputer with 2K bytes of flash programmable and erasable read only memory (PEROM). Its high-density, non-volatile memory compatible with standard MCS-51 instruction set makes it a powerful controller that provides highly flexible and cost effective solution to control applications. This is a 20pin IC [4].
VIII. WORKING AND METHODOLOGY
This circuit is supposed to be operated by a small pack of battery for the convenience of portability, for this purpose 9v battery is used. As micro controller designed to operate at 5V DC, using regulator a stable supply of same voltage is generated. With the help of a voltage regulator of 7805, constant supply of +5V is derived. A terminal apparatus used in the radio communications system receives a radio frequency signal transmitted from a base station, by an antenna, inputs the signal to a receiving radio-frequency unit via an antenna duplexer, high frequency amplifies the signal, removes unnecessary waves outside the receiving band from the signal, converts the signal to an intermediate frequency signal, demodulates the intermediate frequency signal by a demodulator, and converts the signal into a base band signal.
The control circuit is designed with six keys, out of, four keys are used to move the vehicle in all directions, and remaining two keys are used for process control, means when the vehicle is positioned and it is ready to plant seeds in one row, start key must be activated by which vehicle moves further by performing the function of seeds planting with associated other jobs which are to be done before and after planting the seeds. Once the machine completes the planting job in one row, it has to be stopped at the end of row to position the vehicle in another row, here process can be stopped through six key. The main function of the data transmitting section is to generate 8-bit binary code that is to be transmitted through RF transmitter.
Whenever any key is activated, corresponding code will be produced and it will be transmitted. The function of control keys is to control the movements and process of agricultural machine, vehicle can be moved in desired direction i.e., forward, reverse, right and left directions. By pressing any of the keys, digital data of the particular direction is delivered through output pin of the controller. The output of the micro controller is modulated at 433.92 MHz frequency produced by the RF transmitter, the data delivered from the transmitter radiates in to the air through antenna. Any digital data generated by the transmitter is transmitted as it is, and once the code is finalized, according to that data receiving controller unit has to be programmed.
The output of the (Encoder) micro controller is fed to RF transmitter, for radiating the pulsating energy into air. The function of a radio frequency (RF) transmitter is to modulate, up convert, and amplify signals for transmission into free space. An RF transmitter generally includes a modulator that modulates an input signal and radio frequency power amplifier that is coupled to the modulator to amplify the modulated input signal. The radio frequency power amplifier is coupled to an antenna that transmits the amplified modulated input signal.
The data-receiving module interfaced with processing unit that is designed with 89c2051 controller decodes the data, this data in the form of 8 bit format is known as command code which will be decoded and corresponding control action will be implemented through DC motors and relays. Depending up on the received data, the microcontroller unit is programmed to energize the motors through H-Bridge IC [3].
To generate required power source to drive the vehicle 12V, 2.5Ah, rechargeable, lead acid heavy-duty battery is used. Here we require two different DC levels of +5V & +12V, the battery as it is delivering 12V is used to drive the DC motors, H Bridge, water pumping motor, solenoid coil, vibrating motor, etc. where as for the remaining electronic circuitry consists of micro controller chip requires +5V constant source. To generate a stable supply of +5V, 7805 three terminal voltage regulator chip is used which provides constant supply, though the battery terminal voltage falls down to 8V. The DC motors are designed to operate at 12V DC & each motor consumes a maximum current of 150 milli-amps, there by two motors together consumes 300 milli-amps, the remaining circuitry including micro controller and other devices will consume another 250 milli-amps, similarly water pumping motor consumes 250ma when it is energized and hence the entire system consumes around 800 milli-amps approximately. The battery back up time = battery rating / consumed energy.
L293D is a dual H-Bridge motor driver, so with one IC we can interface two DC motors, which can be controlled in both clockwise and counter clockwise directions. Since the device is having four half ‘H’ Bridges, there by if required four motors can be driven through this single device, moreover the task is to run all four motors in one direction only. L293D has output current of 600mA and peak output current of 1.2A per channel. Moreover for protection of circuit from back EMF output diodes are included within the IC. The output supply (VCC2) has a wide range from 4.5V to 36V, which has made L293D a best choice for DC motor driver.

The Multipurpose Autonomous Agricultural Robot (MAAR) demonstrates its capability to autonomously perform critical agricultural tasks with precision and efficiency. Through integration of cutting-edge technologies and robust design, the system provides a reliable and sustainable solution for modern farming practices.
Conclusion
This project work titled as “Multi Purpose Autonomous Agricultural Robot” is designed and developed successfully. For the demonstration purpose a prototype module is constructed, results are found to be satisfactory. Since it is a demo module it can not be used for real applications, but after making required modifications made in the mechanism and using exact power devices, it can be converted as real working machine. To convert as real working system, the machine should able to plant the seed at some depth in to the soil, for which some force is to be applied, therefore higher rating motors are prefered, otherwise hydraulic technology can be implemented. if the planting mechanism is widened it can be planted more seeds in one row within less time. Presently the machine operates at low speed and speed can be increased by increasing the high speed motors with higher ratings. Accordingly all other major devices like Water tank, water pumping motor, seed planting mechanism, plough mechanism, etc. must be converted in to suitable for real time applications.Presently the machine is designed with single microcontroller unit, therefore functions are minimized, to enhance the process by implementing additional features like counting and displaying the planted seeds, to adjust the machine speed, to pore the water over planted seeds automatically, etc. can be added to the system by using more number of microcontroller units with higher rating memory powers.
References
] Ashish Lalwani, Mrunmai Bhide, S. K. Shah, A Review: Autonomous Agribot For Smart Farming, 46th IRF International Conference, 2015 [2] Akhila Gollakota, M.B.Srinivas, Agribot-A multipurpose agricultural robot, India Conference (INDICON), IEEE, 2011 [3] Myke Predko, Programming and Customizing the 8051 Micro-controller [4] Muhammad Ali Mazidi, Janice Gillispie Mazidi &, Rolin D. Mc Kinlay, The 8051 Micro controller and Embedded Systems – using Assembly and C [5] Sandeep Konam, “Agricultural Aid for Mango cutting (AAM),” Electronics & Communication Engineering, RGUKT, R.K. Valley Kadapa, India, 978-1-4799-3080-7 IEEE 2014.
Copyright
Copyright © 2024 Mrs. G Madhavi, Nerella Prathyusha, P Meghana, K Varshitha Reddy, P Akshitha Aishwarya. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60394
Publish Date : 2024-04-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online