

Ijraset Journal For Research in Applied Science and Engineering Technology
Multi-Purpose Tracker Robot
Authors: Isha Mane, Swaraj Mane, Ayush Jaiswal, Vedant Indore, Saroj Desai
DOI Link: https://doi.org/10.22214/ijraset.2024.59676
Certificate: View Certificate
Abstract
This paper introduces a multi-purpose tracking robot designed with Arduino, ultrasonic, infrared sensors, and motor drivers. The robot is capable of performing diverse tasks such as obstacle avoidance, line following, and object tracking. Its hardware comprises an Arduino Uno microcontroller, ultrasonic sensors for distance measurement, infrared sensors for line detection and obstacle avoidance, and motor drivers for controlling DC motors. The software, developed using Arduino IDE, includes algorithms for sensor data processing, decision-making logic, and motor control. By implementing PID control algorithms, the robot achieves enhanced stability and accuracy in navigation tasks like motor speed control and line following. Experimental results validate its effectiveness in various scenarios, showcasing its potential for advanced robotics and automation applications through intelligent sensor integration and control strategies.
Introduction
I. INTRODUCTION
A Human-Following Robot is essentially a robot designed to follow and assist humans. The goal of this project is to create a robot that can accompany and collaborate with people, serving as running companions, carriers, or travel guides. The aim is to evolve robots from mere workers to friendly companions. The key focus lies in the interaction between humans and robots, which is a crucial aspect of the human-following capability.
The robot tracks a person within a specific range, employing human-following techniques commonly used in robots and autonomous vehicles. The pivotal factor in this context is the interaction between humans and the robot, facilitated by various sensors and programs ensuring the robot's proper functioning. In this paper, we explore a robot system that utilizes ultrasonic and infrared (IR) sensors for human following. Ultrasonic sensors are preferred due to their wide detection area, compact size, lightweight nature, low dependence on light, capability to detect shiny surfaces and glass, low memory usage, cost-effectiveness compared to laser detection devices or cameras, and low power consumption. These sensors, along with IR and other components, are mounted on a four-wheel robot platform.
II. LITERATURE REVIEW
The literature surrounding multi-purpose tracking robots utilizing Arduino, ultrasonic, infrared, ESP32, and motor drivers encompasses various key aspects of robotics and control systems.
Arduino-based robotic platforms have been extensively studied due to their ease of use, affordability, and wide range of compatible sensors and actuators. Researchers have explored integrating ultrasonic and infrared sensors into these platforms to enable obstacle avoidance, object tracking, and environmental mapping capabilities. These sensors provide crucial data for decision-making algorithms that govern the robot's navigation behaviour.
The emergence of ESP32 microcontrollers has further expanded the capabilities of robotic systems by offering dual-core processing, built-in wireless communication (Wi-Fi and Bluetooth), and support for advanced control algorithms. This makes ESP32 suitable for real-time data processing, communication with external devices, and coordination in multi-agent robotic systems.
Motor control is another critical aspect, and researchers have investigated different motor driver systems compatible with Arduino and ESP32 platforms. Techniques such as PID control algorithms are commonly employed to achieve precise motor control, which is essential for tasks like speed regulation, trajectory tracking, and maintaining stability during manoeuvres.
Integration and communication protocols play a vital role in multi-purpose tracking robots, enabling seamless interaction between different components such as sensors, microcontrollers, and actuators. Evaluating the performance of these systems involves assessing metrics such as accuracy, response time, energy efficiency, and scalability, providing insights into the effectiveness and applicability of the proposed designs in real-world scenarios.
Overall, the literature review reflects a growing interest in developing intelligent and versatile robotic platforms capable of handling diverse tasks in dynamic environments.
III. PROPOSED METHODOLOGY
A. Define Objectives and Requirements
The objectives and requirements for the development of a multi-purpose tracking robot using Arduino, ultrasonic, infrared, ESP32, and motor driver are crucial elements that guide the project's design and implementation. Functionally, the robot should possess capabilities such as obstacle avoidance, line following, and object tracking, with potential extensions for autonomous navigation or communication with external devices. Performance objectives must be clearly defined, including metrics like tracking accuracy, response time, speed control precision, and energy efficiency to ensure optimal functionality. Scalability objectives are also important to consider, determining whether the robot can accommodate future upgrades or additional features seamlessly.
Regarding hardware requirements, specific components such as an Arduino Uno or compatible board, ultrasonic and infrared sensors for environmental sensing, an ESP32 microcontroller for advanced processing and communication, motor drivers like an H-bridge for motor control, DC motors for locomotion, a sturdy chassis, wheels for mobility, and a reliable power supply are essential for the robot's construction. On the software side, tools like Arduino IDE and ESP-IDF for ESP32 programming, along with algorithms for sensor data processing (e.g., obstacle detection, line tracking
B. Research and Select Components and part List
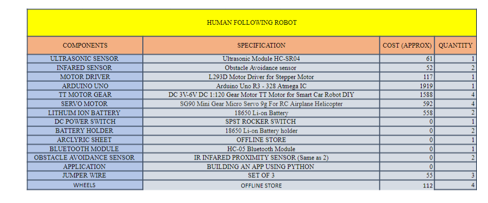
- Ultrasonic Sensor
Function: Ultrasonic sensors use sound waves to measure distance. They emit ultrasonic pulses and measure the time it takes for the waves to bounce back after hitting an object. This information helps the robot determine the distance to obstacles, enabling it to navigate and avoid collisions.
Application: Commonly used in robotics for obstacle avoidance and distance measurement.
2. Infrared (IR) Sensor
Function: Infrared sensors detect infrared radiation, typically emitted by objects due to their temperature. They are used for proximity sensing and obstacle detection.
Application: Widely employed in robotics for detecting nearby objects or obstacles.
3. Arduino R3
Function: The Arduino R3 is a microcontroller board that serves as the brain of the robot. It can process data from sensors, execute control algorithms, and manage the overall operation of the robot.
Application: Used as the central control unit in robotics projects due to its versatility and ease of programming.
4. Motor Driver L293D
Function: The L293D motor driver is an integrated circuit that controls the direction and speed of DC motors. It provides the necessary current and voltage to drive the motors.
Application: Essential for controlling the movement of motors in robotics, especially in applications like motorized wheels.
5. Servo Motor
Function: A servo motor is a rotary actuator that allows for precise control of angular position. It is commonly used to control the movement of robot arms, grippers, or other components.
Application: Used in robotics for precise and controlled movements, such as in robotic arms or for steering mechanisms.
6. Motor Gear
Function: Gears are used to transmit motion and change the speed or torque of the motor. They are crucial for optimizing the robot's movement and ensuring efficiency.
Application: Used in conjunction with motors to control the speed and torque required for specific robotic tasks.
7. Lithium Battery
Function: Lithium batteries provide a portable and rechargeable power source for the robot. They offer a high energy density, making them suitable for powering robotic systems.
Application: Used to supply electrical energy to the entire robot, enabling its mobility and functionality.
8. Bluetooth Module
Function: Bluetooth modules enable wireless communication between the robot and external devices, such as smartphones or tablets. This allows for remote control or data exchange.
Application: Used for remote control, data transfer, or communication between the robot and external devices.
C. Circuit Diagram And Its Working
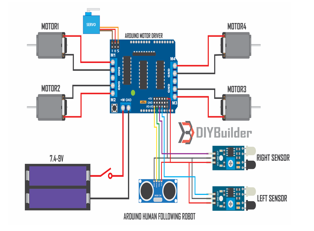
- Arduino R3
- Connect the Arduino to a power source.
- Connect the Arduino to your computer for programming.
- Connect digital and analog pins on the Arduino to various components as needed.
2. Ultrasonic Sensor
- Connect the VCC and GND pins of the ultrasonic sensor to the Arduino's power supply.
- Connect the Trig pin of the ultrasonic sensor to a digital pin on the Arduino.
- Connect the Echo pin of the ultrasonic sensor to another digital pin on the Arduino.
3. Infrared (IR) Sensor
- Connect the VCC and GND pins of the IR sensor to the power supply.
- Connect the signal pin of the IR sensor to a digital pin on the Arduino.
4. Motor Driver L293D
- Connect the motor driver to the power supply.
- Connect the input pins of the motor driver to digital pins on the Arduino for motor control.
- Connect the outputs of the motor driver to the DC motors.
5. Servo Motor
- Connect the power and ground wires of the servo motor to the power supply.
- Connect the signal wire of the servo motor to a digital pin on the Arduino.
6. Motor Gear
- Attach gears to the output shafts of DC motors for desired torque and speed adjustments.
7. Lithium Battery
- Connect the lithium battery to the power input of the entire system.
a. Arduino Uno Rev3
Arduino Uno is a microcontroller board based on the ATmega328P (datasheet). It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz ceramic resonator (CSTCE16M0V53-R0), a USB connection, a power jack, an ICSP header and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started. You can tinker with your Uno without worrying too much about doing something wrong, worst-case scenario you can replace the chip for a few dollars and start over again. “Uno" means one in Italian and was chosen to mark the release of Arduino Software (IDE) 1.0. The Uno board and version 1.0 of Arduino Software (IDE) were the reference versions of Arduino, now evolved to newer releases. The Uno board is the first in a series of USB Arduino boards, and the reference model for the Arduino platform; for an extensive list of current, past or outdated boards see the Arduino index of boards. Refer [Fig 2.1]

Tech specs
|
Microcontroller |
|
|
Operating Voltage |
5V |
|
Input Voltage (recommended) |
7-12V |
|
Input Voltage (limit) |
6-20V |
|
Digital I/O Pins |
14 (of which 6 provide PWM output) |
|
PWM Digital I/O Pins |
6 |
|
Analog Input Pins |
6 |
|
DC Current per I/O Pin |
20 mA |
|
DC Current for 3.3V Pin |
50 mA |
|
Flash Memory |
32 KB (ATmega328P) of which 0.5 KB used by bootloader |
|
SRAM |
2 KB (ATmega328P) |
|
EEPROM |
1 KB (ATmega328P) |
|
Clock Speed |
16 MHz |
|
LED_BUILTIN |
13 |
|
Length |
68.6 mm |
|
Width |
53.4 mm |
|
Weight |
25 g |
b. Arduino Nano

The Arduino Nano is a compact and versatile microcontroller board based on the ATmega328P microcontroller chip.
Here is a detailed overview of the Arduino Nano and its key features:
- Microcontroller: The heart of the Arduino Nano is the ATmega328P microcontroller, which is an 8-bit AVR microcontroller from Atmel (now Microchip). It operates at 16 MHz and has 32KB of flash memory, 2KB of SRAM, and 1KB of EEPROM.
- Form Factor: The Arduino Nano is designed in a compact form factor, making it suitable for projects with space constraints or where a smaller footprint is desired compared to other Arduino boards like the Uno or Mega.
- I/O Pins: Despite its small size, the Nano offers a decent number of I/O pins, including digital I/O pins (14) and analog input pins (8). These pins can be used for interfacing with sensors, actuators, displays, and other external components.
- Voltage Regulator: The Nano includes an onboard voltage regulator, allowing it to be powered via a USB connection (5V) or an external power source (7-12V). This flexibility makes it convenient for various power supply options.\
- USB Interface: The Nano features a mini USB port for programming and serial communication with a computer. It uses the FTDI FT232RL USB-to-serial converter chip to facilitate communication between the microcontroller and the computer.
- Programming: The Arduino Nano can be programmed using the Arduino IDE, which provides a user-friendly interface for writing code, uploading sketches, and debugging. It supports C and C++ programming languages, making it accessible to beginners and experienced developers alike.
- Compatibility: The Nano is fully compatible with the Arduino ecosystem, including libraries, shields, and code examples. It can be used for a wide range of projects such as robotics, automation, IoT devices, sensor interfacing, and more.
- Expansion Options: While the Nano itself has limited onboard features compared to larger Arduino boards, it can be expanded using external modules and shields. For example, you can add sensors, communication modules (such as Wi-Fi or Bluetooth), motor drivers, displays, and more to enhance its capabilities.
In summary, the Arduino Nano with the ATmega328P microcontroller is a versatile and compact development board suitable for a wide range of projects. Its small size, ample I/O capabilities, ease of programming, and compatibility with the Arduino ecosystem make it a popular choice among hobbyists, students, and professionals for prototyping and creating embedded systems.
D. Programming Software
- Arduino IDE
The Arduino Integrated Development Environment (IDE) is the software platform used for programming Arduino microcontroller boards. It provides a user-friendly interface for writing, compiling, and uploading code to Arduino boards, making it accessible to beginners and experienced developers alike.
a. Here's an overview of the Arduino IDE
b. Features
- Code Editor: The Arduino IDE features a simple yet powerful code editor with syntax highlighting, auto-indentation, and code completion features. It supports the Arduino programming language, which is based on C/C++.
- Sketch Structure: Arduino programs, known as sketches, consist of two main functions: `setup()` and `loop()`. The `setup()` function is executed once when the Arduino board starts up, while the `loop()` function runs continuously in a loop until the board is powered off.
- Library Manager: The IDE includes a Library Manager that allows users to easily install, update, and manage libraries of pre-written code for common tasks and components. This makes it simple to incorporate additional functionality into Arduino projects without writing code from scratch.
- Serial Monitor: The Serial Monitor is a built-in tool that allows communication between the Arduino board and the computer via the serial port. It enables users to send data from the Arduino to the computer for debugging and monitoring purposes, as well as receive data from the computer to control the Arduino's behaviour.
- Board Manager: Arduino IDE supports a wide range of Arduino-compatible boards. The Board Manager allows users to select the type of Arduino board they are using and install the necessary board definitions and drivers for programming.
- Upload and Compilation: The IDE provides a one-click upload feature that compiles the sketch and uploads it to the connected Arduino board via USB. It also displays compilation errors and warnings to help users debug their code.
- Integrated Examples: Arduino IDE comes with a collection of example sketches that demonstrate various functionalities of Arduino boards and peripherals. These examples serve as valuable learning resources for beginners and reference materials for more experienced users.
- Compatibility: - The Arduino IDE is compatible with Windows, macOS, and Linux operating systems, making it accessible to users across different platforms. It supports a wide range of Arduino boards, including the popular Arduino Uno, Arduino Mega, Arduino Nano, and Arduino Due, as well as numerous third-party Arduino-compatible boards.
- Community and Support - The Arduino IDE benefits from a large and active community of users and developers who contribute to its development, share projects and tutorials, and provide support and assistance through forums, social media, and other online channels. This vibrant community ecosystem enhances the accessibility and usability of the IDE for users of all skill levels.
Overall, the Arduino IDE serves as a versatile and user-friendly platform for programming Arduino microcontroller boards, enabling users to create a wide range of projects and applications in fields such as robotics, electronics, IoT, and more. Its simplicity, accessibility, and extensive feature set make it an ideal choice for both beginners and experienced developers alike.
2. Ultrasonic Sensor

The HC-SR04 is a popular ultrasonic sensor module used for distance measurement in robotics and electronic projects. Here's an overview of the HC-SR04 ultrasonic sensor:
Principle of Operation:
The HC-SR04 ultrasonic sensor works on the principle of sound waves. It emits high-frequency sound waves (ultrasonic pulses) from its transmitter and measures the time it takes for the sound waves to bounce off an object and return to the sensor (echo). By knowing the speed of sound in the air, the sensor can calculate the distance to the object based on the time it takes for the sound waves to travel to and from the object.
a. Key Components
- Transmitter: The transmitter emits ultrasonic pulses.
- Receiver: The receiver detects the ultrasonic pulses reflected off objects.
- Control Pins: The sensor typically has four pins:
- VCC (Power)
- GND (Ground)
- Trig (Trigger)
- Echo (Echo)
b. Operating Principle
- The trigger pin (Trig) is used to send a short pulse to the sensor to start the measurement.
- The sensor emits an ultrasonic pulse.
- The pulse travels through the air until it encounters an object.
- When the pulse hits an object, it bounces back towards the sensor.
- The sensor detects the reflected pulse using the receiver.
- The time it takes for the pulse to travel to the object and back is measured by the sensor and sent to the Arduino or microcontroller.
- The Arduino calculates the distance based on the time measured and the speed of sound in air.
c. Specifications
- Operating Voltage Typically 5V DC.
- Measuring Range Usually between 2cm to 400cm (approximately 1 inch to 13 feet).
- Resolution: High resolution, typically in mm.
- Accuracy Good accuracy, generally within a few mm.
- Angle of Detection Wide angle, often around 15 degrees.
- Operating Frequency: Typically operates at around 40 kHz.
Usage with Arduino - The HC-SR04 ultrasonic sensor can be easily interfaced with an Arduino or other microcontrollers. Arduino libraries are available to simplify programming, making it straightforward to incorporate distance sensing capabilities into Arduino projects.
Overall, the HC-SR04 ultrasonic sensor is a versatile and widely used component in the maker and robotics communities, providing reliable distance sensing capabilities for a variety of applications.
3. Motor Driver – L293D
The L293D is a popular motor driver IC (integrated circuit) used to control DC motors in robotics and other electronic projects. Here's an overview of the L293D motor driver:
a. Key Features
- Dual H-Bridge Configuration: The L293D IC contains two H-bridge circuits, allowing it to control the direction and speed of two DC motors independently.
- High Current Capability: It can handle relatively high currents (up to 600mA per channel and up to 1.2A peak), making it suitable for driving medium-sized DC motors.
- Low Voltage Drop: The L293D has a low voltage drop across its output transistors, reducing power dissipation and heat generation. Built-In
- Diodes: It includes built-in flyback diodes (also known as freewheeling diodes) to protect the IC and other components from voltage spikes generated by the motor during operation.
b. Pin Configuration
- The L293D IC comes in a 16-pin DIP (Dual Inline Package) or SOP (Small Outline Package). Here are the key pins:
- VCC (Pin 16): Supply voltage for the IC (usually connected to the motor power supply, typically 5V to 36V).
- GND (Pins 4, 5, 12, 13): Ground connections.
- Enable Pins (EN1, EN2 - Pins 1, 9): These pins are used to enable or disable the motor outputs. When high (usually connected to VCC), the outputs are enabled; when low (connected to GND), the outputs are disabled.
- Input Control Pins (Input1, Input2, Input3, Input4 - Pins 2, 7, 10, 15):** These pins control the direction and speed of the motors. By setting different combinations of high and low signals on these pins, you can control the motor's direction (forward, reverse, or stop).
c. Working Principle
- The L293D operates based on the H-bridge configuration, which allows it to control the polarity of the voltage applied to the motor terminals. This polarity control determines the motor's direction of rotation:
- To make the motor rotate in one direction, set the corresponding input pins in a specific sequence (e.g., Input1 = High, Input2 = Low for one direction).
- To make the motor rotate in the opposite direction, reverse the sequence of input signals (e.g., Input1 = Low, Input2 = High).
- By toggling the input signals accordingly, you can control the motor's speed and direction.
d. Usage with Arduino
The L293D can be easily interfaced with Arduino or other microcontrollers to control DC motors. By connecting the control pins (Input1, Input2, etc.) to Arduino digital output pins and using appropriate code, you can control the motor's direction and speed.
Overall, the L293D motor driver IC is a versatile and reliable component for controlling DC motors in various electronic and robotics projects. Its dual H-bridge configuration, high current handling capability, and built-in protection features make it a popular choice among hobbyists and professionals alike.
4. ESP 32 – WIFI & Bluetooth

The ESP32 is a powerful microcontroller module that combines Wi-Fi and Bluetooth connectivity with a dual-core processor, making it ideal for a wide range of IoT (Internet of Things) and embedded projects. Here are some key features and capabilities of the ESP32:
a. Wireless Connectivity
- Integrated Wi-Fi (802.11b/g/n) and Bluetooth (Bluetooth Low Energy - BLE) capabilities allow the ESP32 to connect to wireless networks and communicate with other devices.
- Supports various Wi-Fi security protocols (WPA, WPA2) for secure communication and network access.
b. Dual-Core Processor
- Equipped with a dual-core Ten silica Xtensa LX6 processor, offering high processing power and multitasking capabilities.
- Each core can run at up to 240 MHz, providing efficient performance for demanding tasks and real-time applications.
c. Rich Peripheral Set
- Includes a wide range of peripherals such as GPIO pins, SPI, I2C, UART interfaces, analog-to-digital converters (ADC), pulse-width modulation (PWM) controllers, and more.
- Offers built-in support for SD cards, touch sensors, and capacitive touch interfaces.
d. Low Power Consumption
- Provides power-saving features and sleep modes to minimize energy consumption, making it suitable for battery-powered and energy-efficient applications.
e. Programming and Development
- Can be programmed using the Arduino IDE, Platform IO, or Espresso’s official ESP-IDF (IoT Development Framework), offering flexibility and ease of development.
- Supports programming in C/C++ language, allowing developers to leverage existing libraries and resources for rapid prototyping and development.
f. Versatility and Applications
- Suitable for a wide range of IoT projects, including home automation, sensor networks, wearable devices, smart appliances, industrial monitoring, and more.
- Offers excellent connectivity options for cloud services, IoT platforms, and mobile applications, enabling seamless integration with the Internet and other IoT ecosystems.
Overall, the ESP32 is a versatile and feature-rich microcontroller module that empowers developers to create innovative and connected IoT solutions with robust wireless connectivity, efficient processing power, and a rich set of peripherals. Its popularity stems from its affordability, ease of use, and wide community support, making it a preferred choice for IoT enthusiasts and professionals alike.
5. Infrared Sensor
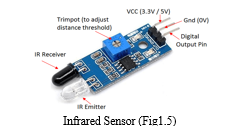
Passive Infrared (PIR) sensors are motion detection sensors that detect infrared radiation emitted by objects within their field of view. Here's an overview of Passive Infrared (PIR) sensors:
Principle of Operation: - PIR sensors detect changes in the infrared radiation emitted by objects in their detection area. They do not emit infrared radiation themselves but instead passively detect changes in the infrared radiation emitted by objects in their field of view.
a. Key Components
- Pyroelectric Sensor: The core component of a PIR sensor is a pyroelectric sensor, which is made of a crystalline material that generates a voltage when exposed to infrared radiation. When an object moves within the detection area of the sensor, it causes a change in the pattern of infrared radiation detected by the pyroelectric sensor, resulting in a voltage change.
- Fresnel Lens: - PIR sensors often include a Fresnel lens in front of the pyroelectric sensor to focus the infrared radiation onto the sensor and create multiple detection zones, enhancing sensitivity and accuracy.
- Signal Processing Circuitry: PIR sensors include signal processing circuitry to analyze the voltage output from the pyroelectric sensor and detect changes indicative of motion.
b. Operating Principle
- When an object moves within the detection area of the PIR sensor, it emits infrared radiation.
- The Fresnel lens focuses the infrared radiation onto the pyroelectric sensor.
- The pyroelectric sensor generates a voltage signal proportional to the detected infrared radiation.
- The signal processing circuitry analyses the voltage signal and detects changes indicative of motion.
- When motion is detected, the sensor typically outputs a digital signal indicating the presence of motion.
c. Applications
- Security Systems: PIR sensors are commonly used in security systems to detect intruders or unauthorized movement in homes, offices, and commercial buildings.
- Lighting Control: PIR sensors are used in lighting control systems to automatically turn lights on or off based on occupancy or motion detection, saving energy and enhancing convenience.
- Automatic Door Openers: PIR sensors are used in automatic door openers to detect the presence of individuals approaching the door and trigger the door to open.
- Home Automation: PIR sensors are used in home automation systems to trigger actions such as turning on lights, adjusting thermostats, or activating security cameras based on motion detection.
- Occupancy Sensing: PIR sensors are used in occupancy sensing applications to detect the presence of occupants in rooms and adjust environmental conditions accordingly, such as turning off HVAC systems when rooms are unoccupied.
d. Usage with Arduino
PIR sensors can be easily interfaced with Arduino or other microcontrollers using digital input pins. Arduino libraries and example code are available to simplify programming for motion detection and related applications.
Overall, Passive Infrared (PIR) sensors are versatile and widely used in various applications for motion detection and occupancy sensing due to their simplicity, reliability, and effectiveness.
6. TT Motor Gear

TT motors, also known as TT gear motors, are a type of geared DC motor commonly used in robotics and electronics projects. Here's an overview of TT motors and their key features:
- Construction
- DC Motor: TT motors are typically small brushed DC motors with low to moderate power ratings. They are available in various voltage and current ratings to suit different applications.
- Gearbox: The distinguishing feature of TT motors is their integrated gearbox. The gearbox consists of gears that reduce the motor's speed while increasing its torque output. This gearing mechanism is essential for applications requiring precise control and higher torque than what a direct-drive motor can provide.
- Mounting: TT motors often come with mounting brackets or flanges that make it easy to attach them to robotic platforms, wheels, or other mechanical structures.
a. Key Features
- High Torque: The gear reduction provided by the gearbox significantly increases the motor's torque output compared to a direct-drive motor of the same size.
- Low Speed: TT motors are designed for applications that require precise control and lower speeds. The gear reduction allows for finer motion control and higher resolution.
- Compact Size: Despite their higher torque output, TT motors are relatively compact, making them suitable for use in small-scale projects and robotics platforms.
- Versatility: - motors are available in different configurations, such as varying gear ratios and motor specifications, to meet the requirements of different applications.
- Low Noise and Vibration: The gear reduction in TT motors helps reduce noise and vibration during operation, making them suitable for applications where quiet operation is desired.
b. Usage with Arduino
To control TT motors with Arduino or other microcontrollers, you typically need an H-bridge motor driver or motor controller. The motor driver allows you to control the motor's direction and speed by adjusting the voltage and polarity applied to the motor terminals.
Overall, TT motors are reliable and versatile components for motion control applications, offering a balance of torque, speed, and compactness suitable for a wide range of projects.
7. Servo Motor SG90

The SG90 is a popular model of servo motor used in various electronics and robotics projects. However, it's important to note that the SG90 is a limited-range servo motor and typically does not have a continuous 360-degree rotation capability. Instead, it is designed for angular motion within a specific range, usually around 180 degrees.
a. Here are the key features and characteristics of the SG90 servo motor
- Operating Principle: Servo motors operate based on feedback control, where they receive a control signal (PWM signal) that specifies the desired position or angle. The motor's internal control circuitry adjusts the motor's shaft position based on this input signal.
b. Key Features
- Small Size: The SG90 servo motor is compact and lightweight, making it suitable for applications where space is limited.
- Low Cost: It is an affordable servo motor, making it popular among hobbyists and students.
- Moderate Torque: While not suitable for heavy-duty applications, the SG90 provides sufficient torque for small-scale projects and mechanisms.
- Precise Positioning: Servo motors like the SG90 offer precise angular positioning, making them ideal for tasks such as controlling robotic limbs, steering mechanisms, and camera gimbals.
- Built-In Gearbox: Servo motors typically include a built-in gearbox that reduces the motor's speed and increases torque output, enhancing precision and control.
- Angular Range:
- The SG90 servo motor is commonly specified with an angular range of approximately 180 degrees. This means it can rotate from 0 degrees (fully counterclockwise) to around 180 degrees (fully clockwise) based on the control signal received.
- Control Interface:
- Servo motors like the SG90 use a standard PWM (Pulse Width Modulation) signal to control their position. The control signal typically consists of pulses with a frequency of around 50 Hz and a pulse width that corresponds to the desired position. The pulse width varies between approximately 1 millisecond (ms) to 2 ms, with 1.5 ms usually corresponding to the center position (90 degrees for SG90).
c. Limitations
It's important to note that the SG90 servo motor, like most standard servo motors, is not designed for continuous rotation like DC motors or stepper motors. Attempting to rotate it continuously beyond its specified range can damage the motor and its internal gearing mechanism.
Overall, the SG90 servo motor is a versatile and cost-effective component for precise angular motion control in various small-scale projects and robotics applications within its specified angular range.
IV. ACKNOWLEDGMENT
We would like to express our appreciation to our mentors for their priceless advice. Special thanks to the open-source community for fostering collaboration and sharing invaluable insights. Appreciation goes to the Arduino team for their innovative platform. Important resources were provided by [VESP]. This endeavor is a collective effort, and the support from the community has been instrumental in shaping the journey of the Multi-Purpose Tracker Robot.
Conclusion
In conclusion, developing a multi-purpose tracking robot requires clear objectives and requirements. Functional goals like obstacle avoidance and object tracking, along with performance metrics such as accuracy and energy efficiency, guide its design. Scalability is crucial for future upgrades. Hardware like microcontrollers and sensors, coupled with software tools and algorithms, enable intelligent decision-making and precise control. This project demonstrates advanced robotics capabilities and the potential for creating adaptable systems for diverse applications in the future.
References
[1] https://store-usa.arduino.cc/products/arduino-uno-rev3 [2] https://store-usa.arduino.cc/products/arduino-uno-rev3 [3] https://www.adafruit.com/product/3942 [4] https://www.infratec.eu/sensor-division/service-support/glossary/infrared-sensor/#:~:text=An%20infrared%20sensor%20(IR%20sensor,systems%20to%20detect%20unwelcome%20guests. [5] https://www.ti.com/product/L293D [6] https://www.espressif.com/sites/default/files/documentation/esp32_datasheet_en.pdf [7] https://store.arduino.cc/products/arduino-nano [8] https://www.filotronix.com/dc-motor/616--tt-dc-gearbox-motor-.html [9] https://en.wikipedia.org/wiki/Servomotor#:~:text=A%20servomotor%20(or%20servo%20motor,a%20sensor%20for%20position%20feedback.
Copyright
Copyright © 2024 Isha Mane, Swaraj Mane, Ayush Jaiswal, Vedant Indore, Saroj Desai. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59676
Publish Date : 2024-03-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online