

Ijraset Journal For Research in Applied Science and Engineering Technology
A Review on Multipurpose Agri Robot
Authors: Mr. Parth. N. Desai, Mr. Pranav. P. Ghodake, Mr. Sameed. D. Girmal, Mr. Prathamesh. S. Hajare, Prof. Mrs. R. S. Ghat
DOI Link: https://doi.org/10.22214/ijraset.2024.65685
Certificate: View Certificate
Abstract
A Multitasking robot for the field of Agriculture has been studied in this research. Now a day, precision agriculture by agricultural robots is the newly emerging technology in agriculture sector to save the time and energy that is wasted in repetitive farming tasks automation in farming processes is quite helpful. To design these sorts of robots there should be certain considerations and particular approach considering the agriculture environment in which it will be working. The working of an autonomous robot is based on field parameters i.e. length and width. Prototype of an agricultural robot “Agri-Bot” is modeled for multitasking such as seeding, ploughing and harvesting with a separate irrigation system. It is a four wheeled vehicle which is controlled by ATMEGA328 microcontroller as master controller, Humidity sensor for irrigation, power supply is provided by solar panel which is eco-friendly to the environment. It will also help in decreasing the use of nonrenewable sources of energy and will not pollute the environment. Other accessories are slaves performing specific operations.
Introduction
I. INTRODUCTION
In an era where agriculture is not a just source of livelihood but a force behind worldwide economies, the need for modern options to enhance agricultural productivity and sustainability has never been more pronounced. The multipurpose agriculture device we present in this venture represents a significant step towards addressing these challenges.
“A person without meals for three days will quarrel, for every week will fight and for a month or so will die.” Agriculture is a branch of applied science. Agriculture is the technology and art of farming including cultivating the soil, producing vegetation, and raising livestock. It is the most vital industry in the world.
India's agricultural panorama is great and extraordinarily varied, consequently, small-scale farmers regularly must cope with numerous challenges and because of a lack of finances, they cannot get superior farm machinery like tractors. price-powerful solutions are essential, and this presents the idea of a Multipurpose Agricultural gadget that has been developed for small-scale farmers. Modem agricultural strategies and gadgets are not used by small landholders due to the fact those systems are too costly and tough to accumulate. By adopting modern farming strategies, we can get maximum yield and top-quality plants that may keep a farmer from going bankrupt, but many farmers nonetheless use the primitive technique of farming techniques because of a lack of expertise or lack of investment in utilizing modern devices. the usage of hand tools for land cultivation remains predominant in India due to the fact tractors require resources that many farmers do not have easy entry to. The want for agricultural mechanization in India ought to consequently be assessed with deeper know-how of the smallholder farmer's activities.
It is a revolutionary machine designed for soil monitoring, pesticiding and sowing seeds to provide a holistic solution to for resource limited farmers.
A. Problem Statement
In Agriculture is a very important sector in Indian economy. Most of the livelihood in India depends on agriculture. As the knowledge based farm labours are less, the requirement for them is high and their wages are increasing. Traditionally farming is done by human being with the help of bullock carts, tractors and tillers etc. The main problem in agricultural field include lack of labor availability, lack of knowledge regarding soil testing, increase in labor wages, wastage of seeds and more wastage in water. The idea of applying robotics technology in the field of agriculture is very new. In agriculture, the opportunity for robot-enhanced productivity is more and the robots are appearing on farms in various guises and in increasing numbers.
B. Objective
- To reduce human effort in the agricultural field with the use of small robot.
- To perform all 4 operations at single time, hence increases production and saves time.
- To complete large amount of work in less time.
- Farmer can operate this robot through remote by sitting at one side and he can operate easily.
- The usage of solar can be utilized for Battery charging. As the Robot works in the field, the rays of the sun can be used for solar power generation.
- To increase the efficiency, the solar power is used and the Power output can be increased.
II. LITERATURE REVIEW
|
Author Name |
Published year |
Tittle |
Relevance to current study |
|
Mr.Hemming |
2011 |
"Agricultural Robots for Field Operations: Concepts and Components" |
This paper provides an overview of agricultural robots, including their concept, components, and applications. It discusses the development of autonomous systems for field operations, including seeding, spraying, and harvesting |
|
Mr.Nandal |
2015 |
"A Survey of Agricultural Robotics" |
This comprehensive survey provides an overview of the latest developments and applications of agricultural robots. It covers various aspects, including robot platforms, sensing technologies, control systems, and applications in precision agriculture. |
|
Mr.Das |
2016 |
"Robotic Agriculture—A Review" |
This review article provides an overview of robotic agriculture systems and their applications. It discusses various aspects of robotic farming, including sensing and perception technologies, crop monitoring, harvesting, and post-harvest handling. |
|
Mr.Griepentrog |
2015 |
"Robotics in Agriculture and Forestry" |
This book chapter explores the use of robotics in agriculture and forestry. It covers topics such as field robots, sensing and perception technologies, robotic manipulation, and autonomous navigation systems. |
III. METHODOLOGY
A. Literature Review Methodology
- Conduct a comprehensive review of existing research and technologies related to IoT in Agriculture automation.
- Identify gaps in current methodologies and technologies that your system will address.
B. System Design
- Architecture Development: Design a scalable architecture for the Atmega-based Agriculture system, outlining key components such as sensors, actuators, controllers, and communication protocols.
- Component Selection: Choose appropriate sensors (e.g., temperature, humidity, motion), microcontrollers (e.g., Atmega328), and communication modules (e.g., Bluetooth).
C. Prototype Development
- Hardware Setup: Assemble the Agriculture with the selected IoT components, ensuring compatibility and integration of sensors and controllers.
- Software Development: Create software for data collection, processing, and control using programming languages such as Python or C++. Develop a user interface for monitoring and control.
D. Data Acquisition and Processing
- Implement data acquisition techniques to gather real-time data from the enviroment.
- Use cloud services or edge computing for data storage and processing to enable remote access and analytics.
E. Testing and Validation
- Conduct rigorous testing of the system under different operational conditions to ensure reliability and accuracy.
- Validate the performance by comparing automated operations with traditional methods in terms of efficiency and productivity.
F. Performance Evaluation
- Analyze data collected during testing to evaluate system performance metrics such as humidity, tempretaure, and resource utilization.
- Gather user feedback to assess usability and identify areas for improvement.
G. Deployment and Maintenance
- Develop a deployment plan for implementing the system in a real-world environment.
- Establish a maintenance protocol to ensure the system operates smoothly and adapts to changes in production needs.
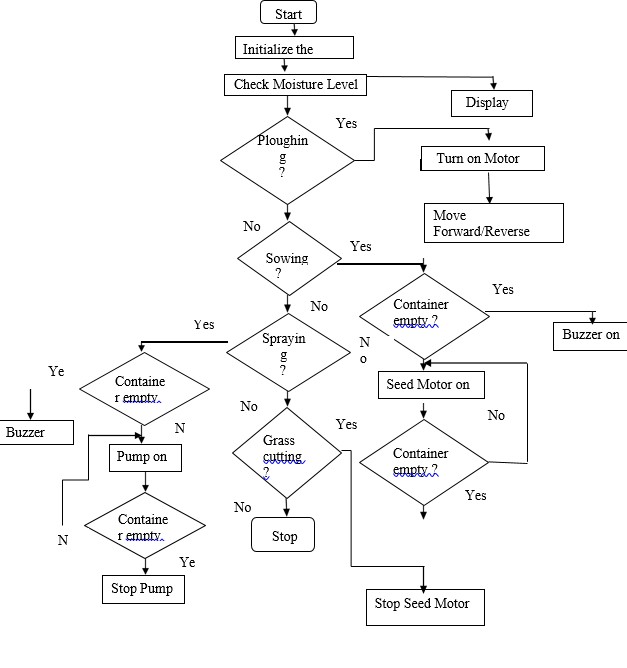
IV. FLOW CHART
V. BLOCK DIAGRAM
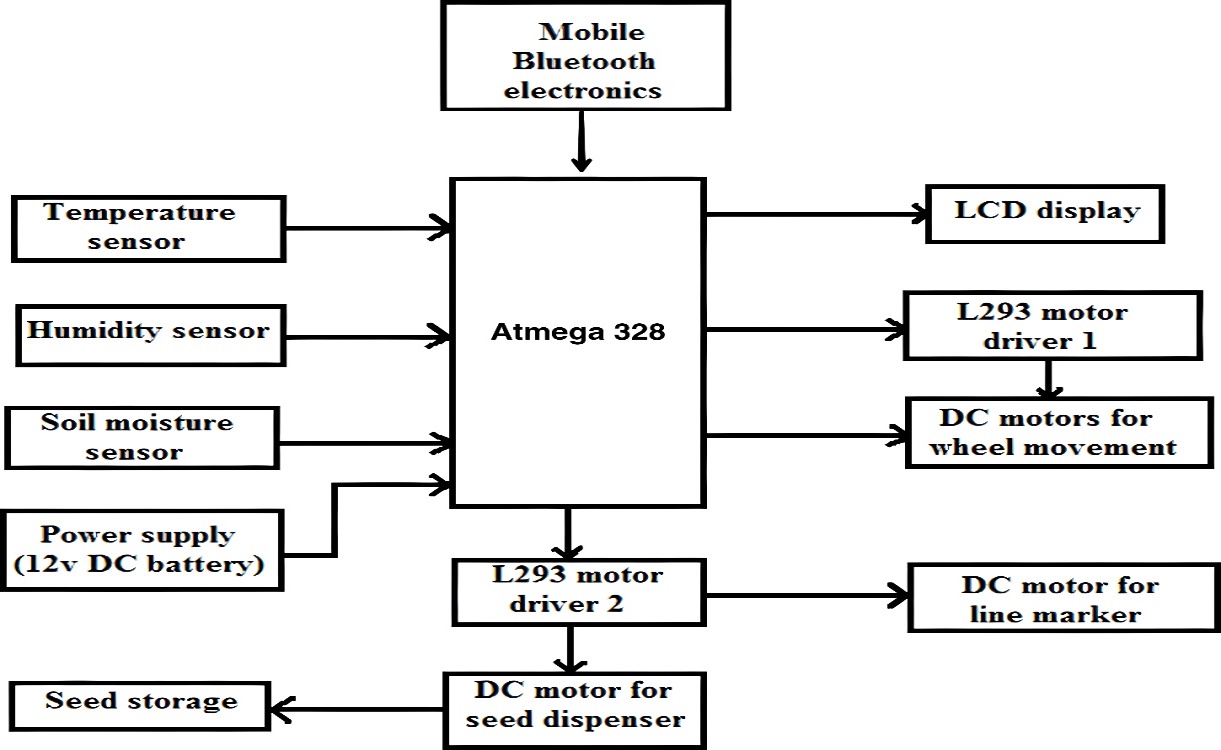
The name of our project is “Multi Purpose Agri Robot”. The L293D motor driver 2 circuit which controls two Dc motors. One DC motor is used for line marker and another one is used for seed dispenser. A line marker is used to mark a line along which seeds are dispensed. The marker has a single teeth and only one line is marked along the path of the robot. The seed storage device is a cone like structure or a hopper in which seeds are stored for seeding purpose. Three types of sensors are used in the robot; they are temperature sensor, humidity sensor and a soil moisture sensor. Temperature sensor is used to measures seed temperature. The humidity sensor measures the humidity content of air. The soil moisture sensors will measure moisture quantity in the soil and conditions of soil i.e., either wet or dry. The output signals from these sensors are displayed on the LCD screen.
Conclusion
In An autonomous multipurpose agricultural robot is designed to perform the complex farming tasks like seed sowing, grass cutting and pesticide spraying. This work is designed to perform sowing of two different sized seeds. The benefits of robot are reduced human intervention and efficient resources utilization. Instructions are passed to the system using bluetooth which ensures no direct contact with human and thus safety of operator is ensured. The robot is solar powered hence it is renewable energy source. The operations are performed using android app. Innovative seed sowing, grass cutting and pesticide sprayer equipment has significant influence in agriculture. By using this advanced work, farmer can save more time and also reduce lot of labour cost
References
[1] Shivam Rai, Navneet Rai, Deepesh Yadav, Shiv Saurabh Srivastava [2021]. \"Multipurpose agriculture machine”. INTERNATIONAL JOURNAL OF CREATIVE RESEARCH THOUGHTS (IJCRT) [2] Akanksha Mande, Shereen Gawande, Mohil Lanjewar, Morvi Kohad , Prof. V. D. Bondre, Prof. C. S. Choudhary (2020).\"MULTIPURPOSE AGRICULTURE MACHINE”. International Journal of Advance Research and Innovative Ideas in Education (IJARIIE) [3] Asst. Prof. Dilip Radkar, Goraksh Choughule, Abhijeet Desai, Prathamesh Gawand, Pradip Bade, Yogesh Chaudhari (2021).\"MULTIPURPOSE AGRICULTURE MACHINE”. INTERNATIONAL RESEARCH JOURNAL OF ENGINEERING AND TECHNOLOGY (IRJET) [4] Singh, G., & Bharti, P. (2020). Multipurpose Agriculture Robot for Harvesting and Crop Monitoring. International Journal of Emerging Technologies and Innovative Research, 7(9), 429-432. [5] L.Manivannan, M.S.Priyadharshini, “Agricultural Robot”, International Journal of Advanced Research in Electrical, Electronics and Instrumentation, Volume 5, Special Issue 1, March 2016, ISSN (Print) : 2320 – 3765, ISSN (Online): 2278 – 8875 [6] S. Umarkar and A. Karwankar, “Automated Seed Sowing Agribot using Arduino,\" in IEEE Conference on Communication and Signal Processing, April 2016, pp. 1379-1383.
Copyright
Copyright © 2024 Mr. Parth. N. Desai, Mr. Pranav. P. Ghodake, Mr. Sameed. D. Girmal, Mr. Prathamesh. S. Hajare, Prof. Mrs. R. S. Ghat. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET65685
Publish Date : 2024-11-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online