

Ijraset Journal For Research in Applied Science and Engineering Technology
Onboard Surveillance Camera Robotic Vehicle
Authors: Tilak Saxena, Abhishek ., Aditya Sahu, Arsh Rahman , Prajal Yadav
DOI Link: https://doi.org/10.22214/ijraset.2024.60768
Certificate: View Certificate
Abstract
Surveillance cameras have been integrated with autonomous vehicles for various purposes like monitoring, guarding and spying. This research paper focuses on how to design, implement, deploy and evaluate a robotic vehicle with a surveillance camera system. This study is on both hardware and software architecture, choice of camera, image processing techniques as well as communication protocol with other devices. Therefore, the suggested system aims at improving surveillance in addition with the number of sensors which can prevent any accident and can increase remote monitoring. The blynk server is used for the transmission of the data of various servers used in the system. Telegram bot is used to perform a two way communication with the system.
Introduction
I. INTRODUCTION
We are living in21st century and this century is the century of technology and one of the major technology of this century is IoT (Internet of Things). In today’s scenario one of the major problem of households is the security and surveillance of the home. There are many homes which are or may be vacant in the days due to all working members of family.
To overcome this situation many people use CCTV cameras, but the problem with CCTV cameras is that they are stationary and cannot provide full surveillance.
To overcome this problem we can use IoT and robotics to provide better surveillance for the homes and can make a robot which is integrated with a camera system which can stream the live footage to the owner and provide better mobility.
In this work we are using number of sensors which can provide more information to the owner about the house and can alert the owners before any accident. We are using gas sensors, sound sensor, humidity and temperature sensor and fire sensor to provide alert about them.
In this robot it will have mobility, sensors, camera and facial recognition for the prevention of unwanted people in house.
II. LITERATURE SURVEY
There were some works which focus on this problem and some of them were successful but they have many problems in them some of them were unable to provide mobility because they were stationary and many of them were using raspberry pi which obviously make their product expensive and out of budget of common people and some of them just have a normal camera on the robot and don’t have facial recognition system in it. As we have studied many research papers of previous work and we found and tried to overcome the things which were missing in their work and we found that none of them were using such a various range of sensors which can guard the home efficiently.
And we are trying to make this whole project on Esp8266 and Esp32 instead of raspberry pi to make it cheaper and affordable for all.
III. PROPOSED WORK
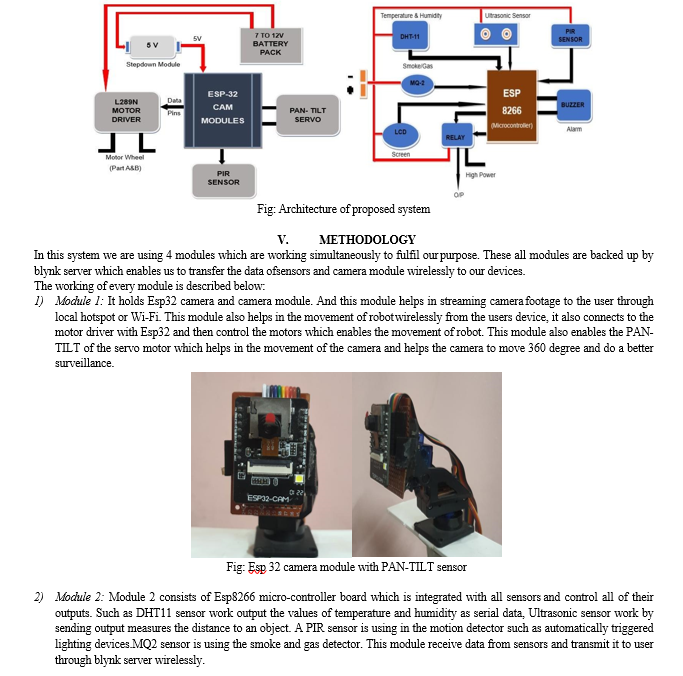
We are proposing system which has mobility and ability to stream the camera footage directly to the owner and it uses a number of sensors which can detect gas leakage, fire, smoke and also able to control a high voltage relay giving it IoT capabilities. It can broadcast the reading of humidity and temperature to the owner’s device over internet.
It can move with the help of two motors connected with two wheels and all the working will be divided into two or more than two modules, these modules are cheap and will help to achieve same level of performance that a more expensive system can provide. This modular feature will help in providing additional accessories in the future development of the robot. The modules are are cheap which make our system affordable for normal users. The hardware updates will be easy due to the module.
IV. PROPOSED SYSTEM
We are proposing a system in which we are using esp8266 module to control wheels and transmit the data of humidity, fire, smoke, PIR motion and ultrasonic sensors. And it also controls the relay, buzzer and LCD display. It will have esp32 camera module to stream the live footage and facial recognition foe the owner. It will give the access to the known faces and will alert the owner for the unknown faces. We will use blynk server to transmit the data over the different devices. We can use a relay also with facial recognition to perform any action in case of unwanted visit or intruder which can be triggered as per programmed.

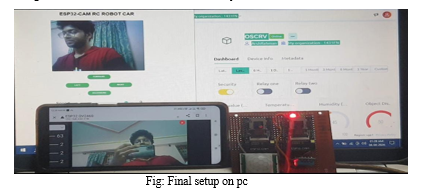
VI. RESULT
This project is working significantly and all the modules are working properly the robot is able to capture any motion occurred in front of it and send it to the telegram bot available at owners device. We can access the data of sensors through the telegram bot, also this all data is transferred through the blynk server and can stream the live footage from robot to our device and can control the movement of our robot. We can know the data of all sensors on a single command and the robot is able to do the facial recognition and it can differentiate between the unknown face and a known face. All the output part of the machine can be fully arranged on a windows machine and can be easily set up to open simultaneously by using windows automation. the output screens work as intended and can be easily used for all modules with movement or to get output when it stands alone as single modules, in the below figure you will be able to see the working of 2 camera module i.e. face recognition and robot driving and control unit , also the output of blynk server is shown here together on a single display we can use multiple displays as per requirement.
Conclusion
The robot produced will have the most affordable working components with the ability to perform to its counter parts without using high end components like raspberry pi. The chip we use is basically Esp 32 for camera display and esp8266 micro-controller for sensor and data transfer for relay and other active switch. Also the chip accept low cost service of blynk server, thus helping it one of the most affordable service. A. Future Scope 1) Integration of more advanced modules to support Ai. 2) Integration of voice assistance with home service like amazon alexa. 3) Integration of more standalone modules to support IOT, ie to operate home lighting, ac, fan etc. 4) It can made like amazon alexa with wheel and camera. 5) Create more modules with multiple sensor. 6) Integrating physical moving robotic arm that will increase its mobility.
References
[1] Kamel Hussein Rahouma, Asmaa Ragab Ibrahim and Yahia B. Hassan, Design and Implementation of a surveillance Smart Home Robot (2022), Egyptian Computer Science Journal Vol. 46, ISSN-1110-2586. [2] Parth Chakraborty and Sajeda Sultana, IoT Based Smart Home Security and Automation System (2022), Springer and Nature Singapore Pte Ltd. [3] Gayathri Devi Ramaraj, R Zahira and Sivaraman Ravichandran, Design and Implementation of a Low-Cost Smart Surveillance Robot for Secured Monitoring System, Mathematical statistician and Engineering Application ISSN: 2094-0343, 2326-9865. [4] Min Fan Ricky Lee and Zhih-Shun Shih, Autonomous Surveillance for an Indoor Security Robot (2022), MDPI. [5] Jims Marching and Alessandro Di Nuovo, Assistive Multimodal Robotic System (AMRSys): Security and Privacy Issues, Challenges and Possible Solutions (2022), MDPI [6] Sanjay S Tippannavar, Madhu Sudan and Vivan Sanjay Athreya, SISR Smart Indoor Surveillance Robot Using IOT for day to day usage. (2022) IEEE 978-1-6654-5635-7/22/@2022 [7] A. Sanjay, Meenu Vijarania and Vivek Jaglan Security Surveillance and Home Automation System using IoT (2020) EAI Endorsed Transactions on Smart Cities I Vol. 5 I Issue 15 I e1. [8] Golap Kanti Dey, Raqibul Hossen and Md. Shafayat Noor, Distance Controlled Rescue and Security Mobile Robot (2013), IEEE 978-1-4799-0400-6/13/@2013
Copyright
Copyright © 2024 Tilak Saxena, Abhishek ., Aditya Sahu, Arsh Rahman , Prajal Yadav . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60768
Publish Date : 2024-04-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online