

Ijraset Journal For Research in Applied Science and Engineering Technology
An Optimized Dynamic Traffic Control System using OpenCV
Authors: Prof. S. G. Pundkar, Chinmay Joshi, Deep Bhapkar, Vaishnavi Jaiswal, Prajwal Choudhari
DOI Link: https://doi.org/10.22214/ijraset.2024.59654
Certificate: View Certificate
Abstract
This study delves into a web-based platform designed to apprehend speeding vehicles. It harnesses the capabilities of OpenCV, a robust computer vision library, to accurately detect high-speed cars. Furthermore, the system integrates a specialized model for identifying vehicles deviating from their designated lanes, thereby fostering safer road conditions. To streamline the process of vehicle identification and potential ticket issuance, it incorporates automatic license plate recognition through Azure Cognitive Services. By amalgamating these advanced technologies, the proposed system offers a comprehensive solution for real-time traffic monitoring and regulation enforcement, with the overarching goal of enhancing road safety and traffic management.
Introduction
I. INTRODUCTION
Our cities are choking on traffic. The exponential rise in vehicles has created a stranglehold, manifesting in gridlock, accidents, and unchecked violations. Traditional methods, heavily reliant on the presence of traffic police, are simply buckling under the pressure. Manual enforcement simply can't keep pace with the ever-increasing volume and relentless flow of urban traffic. Imagine a scenario where issuing fines, identifying wrong-lane offenders, and even calculating vehicle speeds happen instantaneously, without the need for a physical officer at every intersection. This is the transformative potential of a next-generation dynamic traffic control system, the brainchild of this paper.
This innovative system harnesses the power of cutting-edge technologies like computer vision, machine learning, and cloud computing. Traffic cameras empowered by computer vision become intelligent eyes on the road, constantly monitoring traffic flow. Machine learning algorithms analyze the captured video data in real time, automatically detecting violations and calculating vehicle speeds. Gone are the days of waiting for a police officer to pull you over for speeding. This system can identify and penalize offenders electronically, streamlining the enforcement process and freeing up police resources for more complex situations. Furthermore, by leveraging cloud computing, the system gains the ability to handle massive amounts of data efficiently, ensuring smooth operation even during peak traffic hours.
The implementation of this dynamic traffic control system promises a paradigm shift in urban traffic management. By automating violation detection and enforcement, the system alleviates the burden on police forces, allowing them to focus on more critical tasks. The real-time analysis of traffic flow data empowers the system to dynamically adjust traffic light timings, optimizing traffic flow and minimizing congestion. Ultimately, this translates to safer streets, with fewer accidents and a smoother flow of traffic for everyone. This next-generation system offers a glimpse into a future where technology becomes a powerful ally in creating a more efficient and safer urban transportation network.
II. LITERATURE REVIEW
Several studies have been conducted on the topic relevant to our project.
“Detection of Over-Speeding Vehicles on Highways” The paper introduces a method for vehicle speed estimation and tracking of speeding vehicles using two sensors placed at different points. These sensors detect the moving vehicle, capture images, and record time. By comparing the images captured at the two points, the time is estimated. If the estimated time is less than a predetermined limit, the vehicle is identified as speeding and tracked [1]
“An Efficient Approach for Detection and Speed Estimation of Moving Vehicles” outlines an efficient and innovative method for detecting moving vehicles and estimating their speeds using a single camera in well-lit environments. By tracking the vehicle's position in consecutive frames, the system can record the vehicle's movement and identify speed limit violations.
The approach achieves an average detection accuracy of 87.7%. To minimize false positive detections, a cropping operation is employed on both sides of the road [2].
A method for detecting wrong-way drivers on highways. This approach involves three main stages: Learning, Detection, and Validation. They use a mixture of Gaussians to model the orientation pattern of vehicle motion flow, which helps identify objects moving in the opposite direction within lanes. Their method also includes appearance-based validation to ensure accurate detection before triggering alarms. Experimental results demonstrate its robustness against various environmental conditions and image quality issues [3].
“Number Plate Recognition Using OCR Technique”. By leveraging OCR and template matching, the algorithm offers a promising solution for accurately identifying vehicles from digital images, even in challenging lighting conditions. The comprehensive testing conducted on various ambient illumination images validates the algorithm's applicability and effectiveness for real-world applications [4].
An easy way to comply with IJRASET paper formatting requirements is to use this document as a template and simply type your text into it.
III. ALGORITHMS USED
Haar Cascade Classifier, an algorithm for object recognition, is utilized for detecting objects and faces within images and videos by emphasizing features. It forms the basis for object detection using Haar-like features. The technique involves training the cascade classifier with a large set of positive and negative images. In our case, we employed the Cascade-Trainer-GUI to train the Cascade-Classifier using an Indian license plate dataset, supplemented by 3000 negative images to enhance prediction accuracy. The training process consisted of 10 stages, resulting in the generation of an XML-weighted file. This XML file encodes the image features, serving as the foundation for the algorithm. Our cascade classifier demonstrated effective performance in extracting license plates during the extraction process.
- Positive Images: These are images that the classifier is intended to recognize. Our dataset comprised 1100 positive images.
- Negative Images: Conversely, negative images encompass random images that lack the object of interest for the classifier to detect. Our dataset contained 3000 negative images.
IV. PROPOSED METHODOLOGY
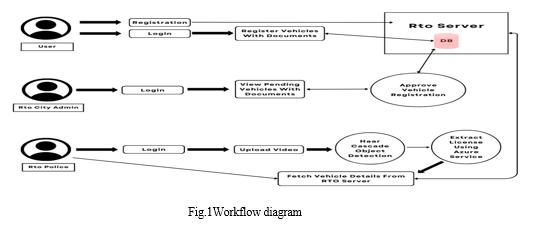
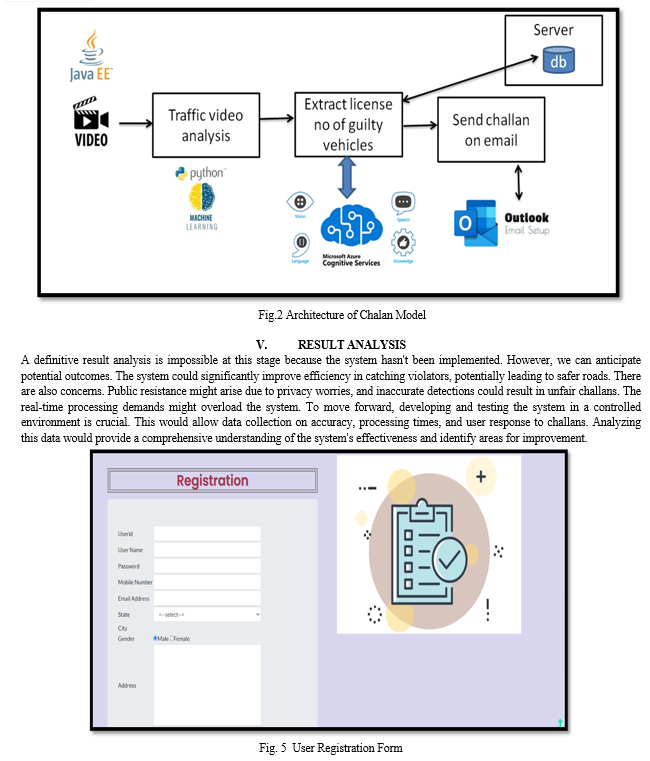
In this paper, we proposed vehicle speed calculation and lane detection from input traffic video. We proposed an online traffic control system in which the police will be able to check and find guilty vehicles and send challan on the owners’ email ID automatically. This web application will be very useful for traffic police to find guilty vehicles automatically. The vehicle owner’s data will be maintained on the RTO server. When the traffic police admin uploads a video, the video will be analyzed using opencv python module, and the speed of the vehicles will be calculated. The model will find out over speed of vehicles and extract license no using Microsoft Azure image to text OCR service. The extracted license no will be sent to the server to extract vehicle owner details from the server. An automatic notification with challan will be snt to the guilty users.
A. Vehicle Detection
The first step is vehicle detection from the input video. To detect vehicles from video we are using Haar Cascade Classifier. Haar Cascade classifier is an effective object detection approach that was proposed by Paul Viola and Michel Jones. This is a machine-learning classifier that is trained from a lot of images. A Haar-like feature considers adjacent rectangular regions at a specific location in a detection window, sums up the pixel intensities in each region, and calculates the difference between these sums. This difference is then used to categorize subsections of an image. There are many Haar datasets available to detect different types of objects. We are using the cars.xml dataset to detect cars from input videos.
B. Speed calculation
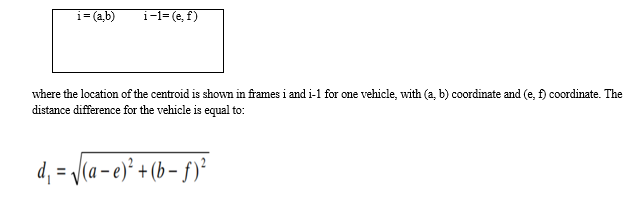
We are calculating the distance moved by the tracked vehicle in a second, in terms of pixels, so we need pixel per meter to calculate the distance traveled in meters. With distance traveled per second in meters, we will get the speed of the vehicle. The speed of the vehicle in each frame is calculated using the position of the vehicle in each frame, so the next step is to find out the blob bounding box, and the centroid.
The blob centroid is important to understand the distance of the vehicle moving in consecutive frames and therefore as the frame rate of captured moves is known, the calculation of the speed becomes possible.
This information must be recorded consecutively into an array cell in the same size as the captured camera image because the distance moved by the centroid is needed which is a pixel with a specific coordinate in the image to find out the vehicle speed. To find out the distance moved by the pixel, suppose the pixel has the coordinate like,
C. Lane Detection
Lane Detection is a computer vision task that involves identifying the boundaries of driving lanes in a video or image of a road scene. The goal is to accurately locate and track the lane markings in real-time, even in challenging conditions such as poor lighting, glare, or complex road layouts.
Lane detection is an important component of advanced driver assistance systems (ADAS) and autonomous vehicles, as it provides information about the road layout and the position of the vehicle within the lane, which is crucial for navigation and safety. The algorithms typically use a combination of computer vision techniques, such as edge detection, color filtering, and Hough transforms, to identify and track the lane markings in a road scene.
D. Challan sending model
Vehicles that are found guilty in the lane and speed checking process will be tracked and the license plate recognition model will extract license no from their images using Microsoft cognitive services. By using the extracted license no system will find out the owner's details and send challan on their email ID automatically.
Conclusion
In this paper we proposed an automatic traffic control system in which our proposed model will be able to extract speed vehicles and wrong lane driving vehicles, therefore the traffic police workload will be reduced and the challan-sending process will become fast. We have used OpenCV and the haar cascade classifier to detect vehicles. We can conclude that the proposed system will be very helpful to traffic police to reduce their workload and time.
References
[1] M. Jain, P. Kumar, P. Singh, C. Narayan Arora, and A. Sharma, “Detection of Over Speeding Vehicles on Highways,” Int. J. Comput. Sci. Mob. Comput., vol. 4, no. 4, pp. 613–619,2015. [2] T. Kumar and D. S. Kushwaha, “An Efficient Approach for Detection and Speed Estimation of Moving Vehicles,” Procedia Comput. Sci., vol. 89, pp. 726–731, Jan. 2016. [3] Goncalo Monteiro, Miguel Ribeiro, Joao Marcos, Jorge Batista,” WRONG WAY DRIVERS DETECTION BASED ON OPTICAL FLOW”. Institute for System and Robotics Dep. of Electrical Engineering and Computers University of Coimbra – Portugal. [4] Bing-Fei Wu, Shin-Ping Lin, Yuan-Hsin Chen, “A Real-Time Multiple-Vehicle Detection and Tracking System with Prior Occlusion Detection and Resolution”. Department of Electrical and Control Engineering, National Chiao Tung University, 1001 Ta-Hsueh Road, Hsinchu 30050 [5] Er. Kavneet Kaur1, Vijay Kumar Banga.” NUMBER PLATE RECOGNITION USING OCR TECHNIQUE” E.C.E Department, A.C.E.T, Amritsar, Punjab, India [6] Khurram Khan1*, Abid Imran2, Hafz Zia Ur Rehman3, Adnan Fazil1, Muhammad Zakwan1 and Zahid Mahmood .” Performance enhancement method for multiple license plate recognition in challenging environments”. Department of Avionics Engineering, Air University, Islamabad, Pakistan.
Copyright
Copyright © 2024 Prof. S. G. Pundkar, Chinmay Joshi, Deep Bhapkar, Vaishnavi Jaiswal, Prajwal Choudhari. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59654
Publish Date : 2024-03-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online