

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of Ornithopter Flapping Wing Mechanism for Aerial Surveillance and Reconnaissance
Authors: R Gobika, Dr. S. Periyasamy, Dr. N. Nandakumar
DOI Link: https://doi.org/10.22214/ijraset.2024.63089
Certificate: View Certificate
Abstract
This projects aim is to design ornithopters with flapping wings, drawing inspiration from the natural flight of birds. The methodology begins with a comprehensive analysis of various bird wing designs. The structural analysis is essential to ensure an accurate replication of bird wings in the ornithopter\'s design. A belt drive system in ornithopters efficiently transfers engine power to the wings, converting rotational motion into flapping motion, crucial for sustained flight and performance. To execute the modelling process effectively, Creo Parametric software is employed, enabling the creation of a highly detailed falcon wing with an integrated flapping mechanism for generating lift and thrust. Although surveillance drones are currently in use, the ongoing work focuses on creating ornithopters for surveillance and reconnaissance purposes. These devices emulate the natural flight of birds, consequently enhancing the capabilities of diverse countries in the defence and disaster management.
Introduction
I. INTRODUCTION
An ornithopter, derived from the greek words "Ornithos" meaning bird and "Pteron" meaning wing, is an aircraft that achieves flight through the flapping of its wings. Designers often model these machines after the flapping-wing flight observed in birds, bats, and insects [1]. Drones, also called unmanned aerial vehicles (uavs), are aircraft without a human pilot on board that can be either remotely piloted or completely autonomous. Uavs are slowly becoming part of our daily lives [2, 3]. While 20 years ago they were almost exclusively used by the military, the recent technological advancements made them accessible even to the general public. Nowadays, uavs are being used in many fields ranging from aerial photography to remote inspection and small drones can be found in hobby stores for less than 150 euro [4]. Micro air vehicles (mavs) have received significant attraction in the past few years. The application of these drones is including for border patrol, search-and-rescue and surveillance. Because of the small size compared to uav it is easy for the border performance. These mav drones are basically into four categories, I.E. Fixed wings, flapping wings, rotary wings and vertical take-off and landing. These types of drones are control and its performance could be applying them where the presence of a human is impossible and more dangerous. For mav which have to ability to optimize and enhance the capability and endurance of the drones [5-7]. Nowadays there are so many different types of drones are integrated and participating in a wide range of science. Ornithopters, inspired by the flight of birds, are a fascinating category of aerial robots that achieve flight by flapping their wings [8]. Over the years, universities and researchers have increasingly shown interest in ornithopters, leading to a diverse range of innovative designs. While the principle of operation for ornithopters is similar to traditional airplanes, with both generating lift through wing movement, the key distinction lies in how they achieve it. Rather than using rotating propellers, ornithopters rely on the flapping motion of their wings [9-11]. During the wing's upstroke, air flows over the wing from above, while during the down stroke, air flows from below. These airflow modifications vary across the wing, being more pronounced towards the wingtip [12]. Ornithopters are often designed to resemble birds or insects and serve various practical applications. They have gained attention in military contexts, primarily for discreet aerial reconnaissance that doesn't alert enemies to surveillance. Equipped with video cameras, some ornithopters can hover and navigate in confined spaces. In the realm of wildlife protection, radio-controlled robots birds help deter potential engine-damaging birds around forestry and wildlife survey airplanes. Compared to traditional fixed-wing aircraft, ornithopters offer potential advantages in terms of efficiency, cost-effectiveness, and environmental friendliness, making them an exciting area of exploration and development in the field of aviation and robotics [13-16].
II. FLAPPING MECHANISM
A flapping mechanism is an oscillating action that repeats itself and is analogous to the flapping of wings or other similar structures. This mechanism provides lift and propulsion in a variety of situations, including bird flight and man-made devices like ornithopters. For improved manoeuvrability in aerial vehicle design and biomimicry, efficient flapping systems are crucial [17]. Staggered crank mechanisms adjust timing by placing connecting rods at diverse angles on separate crank throws.
This configuration is particularly effective for small ornithopters due to its simplicity and precision. Outboard wing hinge mechanism facilitates controlled movement at the outer edge of an aircraft's wing. It enhances aerodynamic efficiency and allows for precise adjustments during flight, optimizing overall performance. Dual cranks using two different cranks is an additional approach. An extra driving shaft and gear are needed for this. The weight of this system is likely to be slightly higher than that of the outboard wing hinge mechanism seen above, but the flapping will be more symmetrical. Transverse shaft using a single, transverse driving shaft with cranks at either end is one way to modify the concept of twin cranks. The connecting rods need ball joints at their ends since the cranks are not turning in the same plane as the flapping arc. When ball bearings run in a single plane, there is less friction as a result. The motor powers a crank shaft that rotates. The connecting rods raise and lower the wings as the crank rotates. Slider-crank mechanism in ornithopters comprises a crankshaft, connecting rod, and slider. As the crankshaft rotates, the connecting rod converts this motion into linear reciprocation of the slider. This, in turn, drives the ornithopter's wing structure, enabling the desired wing flapping motion for mimicking bird flight in ornithopter propulsion [18].
III. AERODYNAMIC ASPECTS OF AN ORNITHOPTER
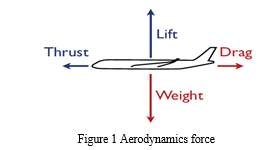
Aerodynamics forces (fig 1) represented lift is the force that generates a force perpendicular to the fluid flow by using newton's laws and the fluid continuity. Weight opposes lift as lift is the force that draws objects toward the earth. Drag is an aerodynamic force that decreases speed, whereas thrust is the force that propels objects through the air. The angle at which the ornithopter's wings are linked to the body is known as the angle of attack. The lift and thrust of the wing's downward stroke is produced by deflecting air downward and backward. Because of their flexible construction, the wings may flex to the necessary angle of attack to generate the forces needed to achieve flight [19, 20].
IV. PROBLEM IDENTIFICATION
Developing a mechanical device that can replicate the complex flying behaviour of birds and achieve prolonged, controlled flight is a problem in ornithopter design. First, an effective flapping mechanism that closely resembles the wing movements seen in birds must be created. This mechanism must be able to provide enough lift and thrust while consuming the least amount of energy. In order to provide effective flapping action and reduce drag, the wing design must also offer the best possible lift, stability, and control. Lastly, the ornithopter's structural design should strike a compromise between weight and structural integrity so that, although being lightweight, it can withstand the forces produced during flapping. Although there are currently surveillance drones in use, current efforts are focused on creating ornithopters that are intended for use in surveillance and reconnaissance tasks. Inspired by bird flight, ornithopters seek to offer benefits in terms of energy economy, stealth, and agility. These bio-inspired aircraft offer a viable way to improve aerial reconnaissance and surveillance capacities for a range of uses.
V. DESIGN OF ORNITHOPTER
A. Ornithopter Wing Mechanism
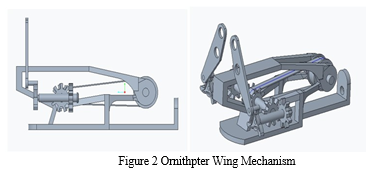
A belt drive system in ornithopters transfers power from the engine to the flapping wings, enabling efficient mechanical operation. Initially, (Fig 2) represented belt drive and tail are connected at the base, leading to a gear joint on the driving shaft. This setup allows the transmission of rotational motion. The gear joint subsequently links to a connecting rod from the crank mechanism, which converts rotational motion into the flapping motion needed for the wings. This intricate assembly ensures that the engine's power is effectively transmitted through the system, allowing the wings to flap with sufficient force and precision. The belt drive system's role is crucial in maintaining the efficiency and performance of the ornithopter, ensuring that the mechanical energy is properly converted to the desired wing movements for sustained flight.
B. Model Of Ornithopter
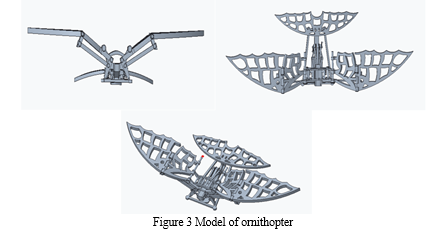
The ornithopter has been meticulously modelled using CREO PARAMETRIC 8.0 software according to original dimensions. The base serves as a foundational component, holding the entire assembly together. Within this setup, the driving pulley and driven pulley work in tandem to transmit power, initiate motion, and control speed using belts. The model includes the driven pulley, driving pulley, and belt. Gears can be attached to the driving pulley to efficiently transfer and control rotational motion within the machinery. A bird's tail, crucial for balance, stability, steering, and aerodynamic control, is connected to the base, and its model is accurately represented. The crank and connecting rods (left and right) in the ornithopter convert rotary motion into the reciprocating movement of the wings, simulating bird flight for propulsion. The models of the crank and connecting rods are detailed to ensure accurate functionality. The wings, connected to the base attachment, emulate bird flight by generating lift and propulsion through their flapping motion, with their models included for precise replication. Additionally, ornithopter pins secure critical components, ensuring proper assembly and movement, which are pivotal for replicating bird flight through the flapping motion in this aircraft.
Conclusion
The development of ornithopters, inspired by the sophisticated flight mechanisms of birds, represents a significant advancement in aerial reconnaissance and surveillance technology. By meticulously analysing bird wing structures and employing a belt drive system to convert engine power into precise flapping motions, the ornithopter achieves efficient and sustained flight. The integration of key components such as cranks and connecting rods ensures a faithful replication of natural bird flight dynamics. These bio-inspired vehicles offer distinct advantages in terms of energy efficiency, stealth, and manoeuvrability, making them invaluable for defence and disaster management applications. As technological research progresses, ornithopters have the potential to transform the field of micro air vehicles (mav), providing innovative solutions for a wide range of challenging environments. This ongoing work highlights the promise of ornithopters to enhance both military and civilian aerial operations, underscoring their importance in the future of aviation and robotics.
References
[1] Collis SS, Joslin RD, Seifert A, Theofilis V. Issues in active flow control: theory, control, simulation, and experiment. Prog Aerosp Sci 2004; 40(4):237–89. [2] Strang KA. Efficient flapping flight of pterosaurs [dissertation]. Stanford: Stanford University; 2009 [3] Jackowski ZJ. Design & construction of an autonomous ornithopter [dissertation]. MA: Massachusetts Institute of Technology; 2009. [4] Bunget G. BATMAV a bio-inspired micro-aerial vehicle for flapping flight [dissertation]. NC: North Carolina State University; 2010. [5] Bansmer S, Radespiel R, Unger R, Haupt M, Horst P. Experimental and numerical fluid–structure analysis of rigid and flexible flapping airfoils. AIAA J 2010; 48(9):1959–74. [6] Gomes JP, Yigit S, Lienhart H, Schaefer M. Experimental and numerical study on a laminar fluid–structure interaction reference test case. J Fluids Struct 2011; 27(1):43–61. [7] Mazaheri K, Ebrahimi A. Experimental investigation on aerodynamic performance of a flapping wing vehicle in forward flight. J Fluids Struct 2011; 27(4):586–95. [8] Mazaheri K, Ebrahimi A. Experimental investigation of the effect of chordwise flexibility on the aerodynamics of flapping wings in hovering flight. J Fluids Struct 2010; 26(4):544–58. [9] Mazaheri K, Ebrahimi A. Optimization of the cruise flight dynamics of a flapping wing vehicle based on experimental aerodynamic data. J Aerosp Eng ASCE 2012; 25(1):101–7. [10] Li Y, Nahon M. Modeling and simulation of nonlinear dynamics of flapping wing MAV. AIAA J 2011; 49(5):969–81. [11] Grauer Jr JA, Hubbard JE. Multibody model of an ornithopter. J Guid, Control, Dynam 2009; 32(5):1675–9. [12] Grauer Jr JA, Hubbard JE. Inertial measurements from flight data of a flapping-wing ornithopter. J Guid, Control, Dynam 2009; 32 (1):326–31. [13] De Croon GCHE, de Clerq KME, Ruijsink R, Remes B, de Wagter C. Design, aerodynamics, and vision-based control of the DelFly. Int J Micro Air Veh 2009; 1(2):71–97. [14] Nagai H, Isogai K, Fujimoto T, Hayase T. Experimental and numerical study of forward flight aerodynamics of insect flapping wing. AIAA J 2009; 47(3):730–42. [15] Liu H, Aono H. Size effects on insect hovering aerodynamics: an integrated computational study. Bioinsp Biomim 2009; 4(1):015002-1–0150021-3. [16] Zhang YL, Wu JH, Sun M. Lateral dynamic flight stability ofhovering insects: theory vs numerical simulation. Acta Mech Sin 2012; 28(1):221–31. [17] Hord K, Lian Y. Numerical investigation of the aerodynamic and structural characteristics of a corrugated airfoil. J Aircr 2012; 49 (3):749–57. [18] Kim WK, Ko JH, Park HC, Byun D. Effects of corrugation of the dragonfly wing on gliding performance. J Theoret Biol 2009; 260 (4):523–30. [19] Levy DE, Seifert A. Simplified dragonfly airfoil aerodynamics at Reynolds numbers lowers than 8000. J Phys Fluid 2009; 21 (7):071901-1–071901-17. [20] Levy DE. Flow features of a schematic dragonfly airfoil at glid [dissertation]. Tel-Aviv: Tel-Aviv University; 2010.
Copyright
Copyright © 2024 R Gobika, Dr. S. Periyasamy, Dr. N. Nandakumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET63089
Publish Date : 2024-06-03
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online