

Ijraset Journal For Research in Applied Science and Engineering Technology
PicPatrolling: Smart Surveillance with ESP32CAM
Authors: Shahaji Kalbande, Vaibhav Patil, Suyog Thombare, Prof. Dr. Bhausaheb Shinde , Prof. Neha Dumne
DOI Link: https://doi.org/10.22214/ijraset.2024.64667
Certificate: View Certificate
Abstract
Robotics is an exciting and developing branch of science. Robots are now common in society because of their high efficiency and durability, and they have many users. Security and surveillance robots, especially those with wheeled movements and agility, are important for multiplexes in security and surveillance domains, including public security, military, facilities, and home security. These robots carry built-in high-end sensors, cameras, and communication equipment that simplify real-time data collection in indoor and outdoor environments. \"PicPatrolling: Smart Surveillance with ESP32CAM” is a technique that attempts to improve the current concept of security and surveillance. The proposed system incorporates ESP32CAM for image capture and transmission without delay and GPS for location tracking. The system includes sending photo e-mail alerts, making immediate reports, and guaranteeing adequate area coverage. The robot can move during operation in a complex environment using computer vision, machine learning, and sensor fusion to recognize objects, faces, and changes and monitor important regions.. Application areas for surveillance robots include commercial and populated regions, transport points and architectural structures, other soft regions that people cannot access, and other dangerous areas that humans cannot monitor for various reasons.
Introduction
I. INTRODUCTION
In recent years, robotics has experienced significant progress, leading to enhanced functionalities across various sectors. A particularly promising application is the deployment of surveillance robots, which can improve security protocols in a range of settings. The initiative titled "PicPatrolling: Smart Surveillance with ESP32CAM" represents an innovative strategy that merges state-of-the-art technology with practical applications to tackle modern security issues. Conventional surveillance systems. The "PicPatrolling" project seeks to address these shortcomings by using a mobile robot equipped with an ESP32CAM for high-definition image acquisition and GPS for accurate location tracking.
This intelligent surveillance system autonomously navigates designated areas and captures and sends images through email notifications to ensure timely updates and thorough monitoring. The adaptability of "PicPatrolling" makes it suitable for critical infrastructures, public areas, and dangerous environments where human oversight is not feasible. Employing technologies such as computer vision, machine learning, and sensor integration, this initiative will improve the detection and tracking of objects, facial recognition, and anomaly identification. The incorporation of these advanced functionalities guarantees robust and reliable surveillance systems, thus establishing a new benchmark in security solutions. The field of robotics has seen remarkable advancements in recent years, with significant improvements in the capabilities of multiple fields. A notable application of surveillance robots is to enhance security measures in various environments. The project "PicPatrolling: Smart Surveillance with ESP32CAM" exemplifies a novel approach that integrates advanced technology with practical applications to address current security challenges.
The "PicPatrolling" initiative aims to mitigate these issues by deploying a mobile robot equipped with an ESP32CAM for high-resolution imaging for accurate location tracking. This intelligent surveillance system autonomously patrols specified areas and captures and relays images via email alerts to provide timely updates and thorough oversight. The flexibility of "PicPatrolling" allows it to be applied in critical infrastructures, public spaces, and hazardous environments where human presence is impractical. By harnessing computer vision, machine learning, and sensor fusion technologies, this project will enhance object detection and tracking, facial recognition, and anomaly detection. The integration of these sophisticated features ensures a reliable and effective surveillance system, thus setting a new standard for security solutions.
II. LITERATURE SURVEY
A. Presented Design & Implementation Of PicPatrolling: Samrt Surveillance with ESP32CAM.
The design and implementation of surveillance robots stand at the forefront of mobile robotics research, with a goal to develop autonomous systems that perform critical surveillancetasks with minimal human intervention. These adv-anced designs incorporate a wide range of sensors, such as camera, infrared sensors, and ultrasonic sensors, to capture comprehensive environmental data. The integration of microprocessors and sophisticated software algorithms enables these robots to process sensor data in real time, facilitating autonomous decision-making and adaptive behaviors.
A crucial aspect of design involves the robot’s physical structure, which must be robust to navigate diverse terrains while remaining compact and agile. Researchers have explored various locomotion mechanisms, including wheeled, tracked, and legged configurations, to optimize mobility and stability. Furthermore, the implementation phase involves developing control systems and communication protocols, ensuring seamless interaction between the robot and its control center. These surveillance robots are designed to patrol predefined areas, detect intrusions, and provide realtime video feeds to remote operators. The integration of wireless communication technologies, such as WIFI and cellular networks, enhances the robot's ability to transmit data and receive commands over long distances. This results in significant improvements in security and monitoring capabilities, demonstrating their potential in various applications including public safety, military operations, and industrial surveillance.
B. The study models a Sensor Integration & Fusion
Integrating and fusing sensors is pivotal for augmenting surveillance robot capabilities. Advanced research has explored the combination of data from various sensors such as cameras, microphones, and infrared detectors to construct accurate and comprehensive environmental images. This sensor fusion allows robots to process multidimensional data streams in real time, which significantly enhances their object detection, facial recognition and anomaly identification capabilities.
By employing sophisticated algorithms and machine learning techniques, these robots can seamlessly merge data from multiple sensors, providing robust and reliable surveillance solutions. The synergy created through sensor integration considerably improves the situational awareness of the robots, enabling them to function effectively in intricate and dynamic environments. This technological advancement not only enhances detection accuracy and ensures swift and appropriate responses to security threats, making these robots indispensable in modern surveillance systems. Additionally, the combined use of advanced sensors and real-time data processing enables robots to adapt to dynamic environments and detect unforeseen obstacles. This adaptability further ensures the robots' resilience and reliability, enabling them to maintain high performance even under unpredictable condition
C. IOT Based Remote Monitoring & Control System
The integration of sophisticated remote monitoring and control systems has transformed the operational efficacy of surveillance robots, rendering them essential assets in the field of security. By utilizing state-of-the-art Internet of Things (IoT) technology, these robots are designed for operation and oversight from nearly any location, delivering real-time information and high-definition video streams directly to monitoring centers. This functionality guarantees thorough and continuous surveillance, enabling prompt identification and swift action in response to security threats or irregularities.
In the "PicPatrolling: Smart Surveillance with ESP32CAM" initiative, the remote control capability is fundamental to its architecture. The system is carefully crafted to enable operators to effortlessly monitor and guide the robot's movements via an advanced web-based interface. This interface supports the transmission of high-resolution imagery and accurate GPS data, ensuring detailed tracking and oversight. Such comprehensive features not only enhance the effectiveness of surveillance activities but also reduce the risks associated with human involvement in hazardous situations, offering a powerful response to modern security issues.
D. Autonomous Navigation of picpatrolling Robot.
The advancement of autonomous navigation systems has transformed the domain of surveillance robotics, yielding remarkable improvements in operational efficiency and effectiveness. These systems utilize sophisticated algorithms and machine learning methodologies to empower robots to traverse intricate environments autonomously. Through the analysis of real-time sensor data, encompassing visual and spatial inputs, surveillance robots are capable of making informed decisions, circumventing obstacles, and adaptively modifying their routes to guarantee thorough surveillance coverage.
In the "PicPatrolling: Smart Surveillance with ESP32CAM," autonomous navigation is a fundamental aspect that significantly improves the robot's operational functions. This sophisticated system enables the robot to conduct patrols in specified regions with remarkable accuracy, ensuring that every area is thoroughly monitored.
E. Applications & Deployment
The versatility and adaptability of "PicPatrolling: Smart Surveillance with ESP32CAM" underscore its vast range of applications across various sectors. This advanced surveillance system is engineered to provide unparalleled security and monitoring in diverse environments. From safeguarding critical infrastructure to enhancing public safety and fortifying military installations, the deployment scenarios for this technology are extensive. Its ability to autonomously patrol and deliver Realtime photo email alerts ensures continuous, comprehensive coverage, making it an indispensable tool for modern security operations.
This project’s robust design allows for seamless integration into existing security frameworks, providing a scalable solution that can be customized to meet specific operational needs Whether deployed in high-risk areas requiring constant surveillance or in urban environments where quick response to security threats is paramount, "PicPatrolling" excels in its role. Its advanced GPS tracking and high-resolution imaging capabilities ensure that every corner is monitored, and potential threats are promptly detected and addressed, thus significantly elevating the standard of security and operational efficiency in any application.
III. WORKING MECHANISM
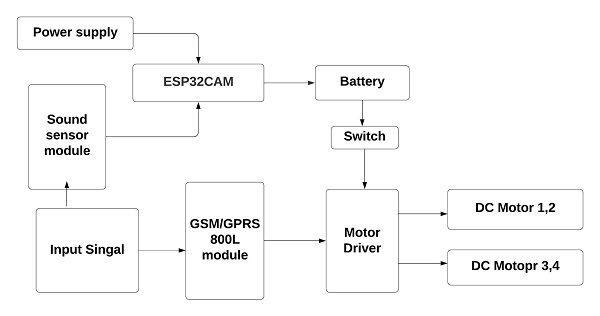
Fig 1- Block diagram
The working mechanism of "PicPatrolling: Smart Surveillance with ESP32CAM" is designed to maximize efficiency and reliability in surveillance operations. At its core, the system integrates the ESP32CAM for high-resolution image capture and the GPS module for precise location tracking. These components work in tandem to provide real-time situational awareness.
Upon deployment, the robot autonomously patrols pre-defined areas, leveraging its advanced sensor suite to detect and respond to environmental simulation. The ESP32CAM continuously captures images, which are analysed by on board algorithms to identify potential threats or anomalies. When such activities are detected, the system immediately sends photo alerts via email to the designated recipients, ensuring rapid response capabilities.
Simultaneously, the GPS module provides accurate location data, allowing operators to track the robot's movements in recreative. This data is crucial for coordinating surveillance activities and ensuring comprehensive area coverage. The auto-nomos navigation system, driven by sophisticated machine learning algorithms, enables the robot to avoid obstacles and adapt to dynamic environments, ensuring uninterrupted operation.
This integrated approach not only enhances the surveillance
Capabilities of the system but also reduces the need for constant human oversight, thus freeing up resources for other critical tasks. "PicPatrolling" exemplifies the fusion of cutting-edge technology with practical application, setting a new standard in modern security solutions.
IV. MATERIALS AND METHODS
- ESP32CAM Module: ESP32 cam is used as a camera for this project it also have Bluetooth and WI-FI module the the WI-FI module is used to connect with wifi and we are streaming the video capture by the ESP32-CAM that capture the video and stream it over the internet.
- DC Motors: Dc motors are the gear motors that is connected to the wheels of the robot and controlled with the help of motor driver. When the motor is powered by DC current, a magnetic field is created within the stator, attracting and repelling the magnets on the rotor. This causes the rotor to start rotating. To keep the rotor rotating, the motor has a commutator.
- Sound Sensor Module: The Sound Sensor Module is a versatile and cost-effective device used to detect and measure sound levels. It typically consists of an electret microphone, an amplifier, and a comparator.
- Battery: 12v battery is used to supply power to the robot. This 12V battery provide the power to the motor driver and ESP8266. and second is 9v battery is used to power Esp32 Cam so that the module is able to stream video.
- Switch: The switch is used to cut off the power provided to the robot car when the switch is ON then the power is on and when the switch is OFF the robot car will not have power to operate.
- UltraSonic Sensor: An ultrasonic sensor is a type of electronic device which uses sound waves to detect the distance of objects in its surroundings. Ultrasonic sensor emits soundwaves with higher frequency and then measure the time it takes for the waves to bounce back after hitting an object. The major application of the ultrasonic sensor is obstacle avoidance, water level sensing etc.
- GSM/GPRS800L: The SIM800L GSM/GPRS module is a compact and satellite communication module designed for use in embedded systems. It provides voice, SMS, and data connectivity, enabling applications that require remote communication
V. ADVANTAGES
- Enhanced Security: By providing Realtime photo alerts and continuous monitoring, this project significantly boosts security in various environments, from urban areas to critical infrastructure.
- Autonomous Operation: The system's ability to patrol designated areas autonomously reduces the need for constant human oversight, allowing security personnel to focus on more strategic tasks.
- Precise Location Tracking: With integrated GPS functionality, the robot ensures accurate location tracking, aiding in swift and effective response to any detected anomalies or threats.
- CostEffective Solution: Utilizing readily available components like the ESP32CAM and GSM/GPRS modules makes this project an affordable yet powerful alternative to traditional surveillance systems.
- Versatility and Adaptability: The project is designed to function effectively in a wide range of environments, making it suitable for use in public safety, military operations, industrial surveillance, and more
- Scalability: The system can be easily scaled to cover larger areas or integrated with additional robots to enhance coverage and effectiveness.
VI. SCOPE OF PROJECT
The scope of "PicPatrolling: Smart Surveillance with ESP32CAM" encompasses the design, development, and deployment of an autonomous surveillance robot equipped with advanced imaging and tracking technologies. This project aims to address contemporary security challenges by integrating the ESP32CAM module for high-resolution photo capture and the GPS module for precise location tracking.
The system's autonomous navigation capabilities, powered by sophisticated algorithms, enable it to patrol designated areas without human intervention. The project also includes the implementation of real-time photo email alert systems, which enhance situational awareness and facilitate rapid response to potential threats.
This initiative is particularly relevant for environments that demand constant surveillance, such as critical infrastructure, military installations, and urban public spaces. By leveraging cutting-edge technologies, the project seeks to provide a scalable and cost-effective solution that enhances security and operational efficiency. The development process involves rigorous testing and optimization to ensure the system's reliability and robustness in various operational scenarios. Overall, the scope of this project extends to creating a versatile and adaptable surveillance system capable of significantly improving the efficacy of modern security operations.
Conclusion
\"PicPatrolling: Smart Surveillance with ESP32CAM\" embodies a milestone in modern surveillance technology, integrating cutting-edge innovations to deliver unparalleled security solutions. The project\'s design showcases the seamless fusion of high-resolution imaging and precise GPS tracking, resulting in a system capable of comprehensive real-time monitoring and rapid response. Through its autonomous navigation and intelligent alert capabilities, the project not only enhances the scope of surveillance operations but also demonstrates the transformative potential of integrating advanced technologies into security frameworks. This initiative stands as a testament to the power of modern engineering in addressing critical security challenges. By providing a scalable, adaptable, and robust solution, \"PicPatrolling\" paves the way for future advancements in autonomous surveillance, setting new standards for efficiency, reliability, and effectiveness. The successful implementation of this project underscores the importance of continual innovation and underscores its potential to significantly elevate global security practices.
References
[1] Surveillance Patrolling ROBOT Using Ardunio Dr.Rambabubusi,B.SaiSreeValli,K.Vijayachandana N.Rama Krishna Rao, R.Leela Lavanya –April 2022J. [2] In 2015, Chand D, Nayak S, Bhat KS, and Parikh S presented a paper titled \"A Mobile Application for Women\'s Safety: WoS App\" at the IEEE Region 10 Conference TENCON in Macao. The conference was held from November 1- 4 of that year, and the paper was published in the conference proceedings. [3] Night Vision Patrolling Robot Using Sound Sensors - PROF. Gangambika G,Muneeroddin, Nidhi D Rao, Nandhini VN, Mahalakshmi G – Februray 2023 [4] In 2015, Chand D, Nayak S, Bhat KS, and Parikh S presented a paper titled \"A Mobile Application for Women\'s Safety: WoS App\" at the IEEE Region 10 Conference TENCON in Macao. The conference was held from November 1-4 of that year, and the paper was published in the conference proceedings. [5] Tasleem Mandrupkar and Manisha KumariRupali Mane, \"Smart Video Security Surveillance with Mobile Remote Control\", International journal of Advanced Research in Computer Science and Software Engineering, 2021, vol. 3, no. 3.. [6] M. Md Athiq UR Raza Ahamed and Wajid Ahamed, \"A Domestic Robot for Security Systems by Video Surveillance using Zigbee Technology\", international Journal of Scientific Engineering and Technology, May 2021, vol. 2, no. 5, pp. 448-453 [7] Night Patrolling Device–ref by Prof . Mohammed Hassan, Sameer Dongre, Nishant Gadhawe, Rahul Urkude, Bhushan Kohade, Rahul Tayde ,Parish Swami -27 july 2021 [8] Design And Implementation of Security Patrol Robot Using Android Application – Tahizb Mashrib , Hasib Zunair , Maofic Farhan Karin – October 201 [9] IOT Night Safety Patrolling Robot-ref by Mrs.Suvarna S Patil BE Assistant Professor Dep ECE ,RYM Engineering –issue 2022 [10] Smart Spy Survillance Robotic System – ref by A.Arthi , G.Kaplana , M.Kavitha , Jaya Surya . International Journal of Engineering Research of Technology – 2018 [11] Automated video surveillance – Mrs. Prajakta jadhav, Mrs. Shwetha Suryavanshi, Mr. Devendra Jadhav [12] In August 2020, the International Research Journal of Engineering and Technology published an article titled \"Design of Smart Medical Assistant Robot for Contactless Preliminary Health Check Up of Patients\" authored by Supreet Thale, Bhushan N Chopda, Shreyas Deo, Viraj Nyayadhish, P Srivalli, Unnati Choudhari, Serlin Agnes, and Nilofar Sameena M
Copyright
Copyright © 2024 Shahaji Kalbande, Vaibhav Patil, Suyog Thombare, Prof. Dr. Bhausaheb Shinde , Prof. Neha Dumne. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET64667
Publish Date : 2024-10-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online