

Ijraset Journal For Research in Applied Science and Engineering Technology
Real Time Traffic Management System Using Machine Learning
Authors: Yogesh Ghodke, Shubham Khade, Abuzar Shaikh, Prof. Snehal Khartad
DOI Link: https://doi.org/10.22214/ijraset.2024.64790
Certificate: View Certificate
Abstract
The increasing quantity of automobiles on the road presents difficulties for conventional traffic control strategies. With heavy traffic levels, these traditional methods find it difficult to handle. They only work well in light traffic situations; when there is a large difference in traffic volume on one side of the road or when vehicle density increases on one side, they are unable to adjust. Therefore, by adding dynamic signal switching capabilities, we want to modernise the static signal system. The updated system will continuously check and modify the timing of the signals in real time. In this project, we want to use real-time image detection to precisely measure traffic density and figure out the best times to switch signals, especially when traffic is heavy. Putting this strategy into practice should effectively reduce traffic jams and accelerate traffic flow.
Introduction
I. INTRODUCTION
People prefer their own cars to public transportation in today's society, which has resulted in an abundance of private automobiles on the road. Many problems are made worse by this increase in vehicle traffic, but one major one is traffic congestion. Limiting people's usage of their own cars is not feasible, but efficient traffic flow management may help to lessen traffic congestion. The Intelligent Transport System (ITS) is one prominent project that aims to transform urban transport systems into "Smart systems" in response to these difficulties. This initiative's construction of a system with dynamic traffic light monitoring is a crucial component. This method modifies signal switching times according to the number of vehicles on each side of the road, instead of following set schedules. To precisely estimate the number of vehicles on the road, a variety of detecting methods are used. Our goal is to createa prototype that faithfully captures the state of the roads today and successfully handles traffic control concerns. We use a pre- trained model for object detection called YOLO to accomplish this. When combined with OpenCV, YOLO makes object detection easier by removing noise from input photos and using foreground and background subtraction algorithms. Road footage is captured by CCTV surveillance cameras and supplied into a pretrained algorithm. For the purpose of taking pictures, the road is split up into distinct frames with consistent sizes. The number of vehicles seen in these pictures is then sent to a Raspberry board. This count is used to determine the changeover timings for either side of the road. The software dynamically modifies the signal switching: if the number of vehicles in each frame is reasonably constant, the signals follow predefined intervals; if the number of vehicles in a frame differs significantly and goes above a threshold, real- time signal switching takes place. LITERATUR SURVEY The Gaussian mixture model and Kalman filter were utilised in this study's object detection and tracking task to carry out object detection. Consequently, video input from the signal was processed. The input video was used as an example, taking into account the limit of both daytime and nighttime traffic scenarios. Takes video as input. Data was collected using a stationary camera position from the top of a pedestrian bridge. Blob areas were used to indicate the detected image in cases where the object identified as a vehicle corresponded to the blob areas. When an item is recognised in an image, the image with the blob creates a vibrant bounding box around it to represent the object, this system is created to validate vehicle detection as shown in fig 1.1
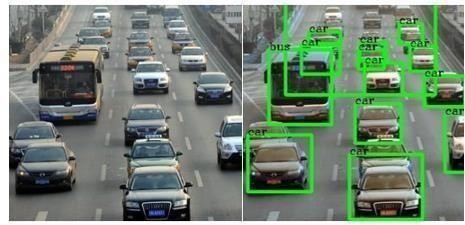
Fig 1.1 Object Detection using YOLO
An effective acquisition approach must be offered in order to process the traffic condition, since the extraction methods now in use are not very effective for processing the traffic basis data. This work uses a gaussian and enhanced Kalman filter approach to resolve the multimoving vehicle targets detection conflict. Additionally, the heuristic enhancement method was used to raise the detection efficiency. The suggested approach has the potential to both recognise vehicles from continuous video frames and effectively reduce noise interference. The primary idea put out in this study concerned error detection, no missing, and no re-inspection when identifying the vehicle from the taken pictures. The study is primarily concerned with creating a low-cost environment with inexpensive cameras. Its basic operation depends on using algorithms based on cameras to control traffic flow on roadways. Background and foreground image subtraction algorithms are used to detect vehicles from collected photos. The Kalman filter makes it easier to track vehicles. The system proves its efficacy by maintaining detection accuracy throughout the day and night using CCTV and infrared camera video. Using computer vision techniques, the procedure entails the detection, counting, and tracking of vehicles. Vehicles can be distinguished from the backdrop with the help of blob analysis. The model provides more flexibility in cluster covariance analysis and has expanded its detection capabilities.
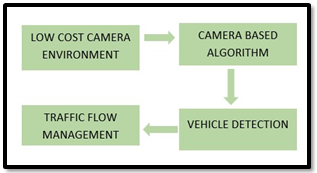
Fig 1.2 Vehicle Detection and Tracking
II. PROBLEM STATEMENT
With the escalating global issue of traffic congestion, conventional methods of traffic management are proving insufficient for ensuring smooth commuting experiences. There's an evident necessity for a universally accepted solution to enhance traffic management effectively. Presently, traffic signals operate on fixed intervals, irrespective of the varying vehicle densities at different signal points along the road, as depicted in Figure below Consequently, this static approach falls short in adapting to fluctuating traffic conditions. In such instances, if signals continue to switch at regular intervals, areas with high vehicle densities remain congested continuously. Existing systems primarily focus on vehicle counting to enable comparative analysis of traffic patterns. However, these systems are most effective when traffic volumes peak, making individual management challenging. Therefore, our objective is to develop a model that accurately represents real-time traffic scenarios and dynamically adjusts signal switching based on predetermined criteria and threshold values.
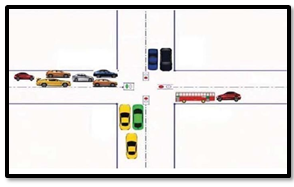
Fig 2.1 Solution for Current Traffic Scenario
According to the fig 2.1 In comparison to the other three lanes, LANE 1 has more vehicle traffic than the other three, as the diagram above illustrates. The typical signal switching approach causes traffic in a certain lane by switching signals in a clockwise direction. to get around the issue of giving the signal the same switching timing even when the number of cars on the road varies from lane to lane.
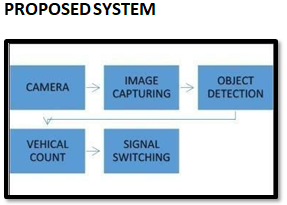
Fig 3.1 Block Diagram Of Proposed System
The model dynamically adjusts traffic signals according to current conditions in order to address current traffic problems. The YOLO pretrained model is used for counting and detecting vehicles. The model uses a single pi camera to take pictures of all four sides of the road and is compatible with a variety of cameras, including less expensive options such as security cameras. The camera is mounted on a rotating motor for a 360-degree view to guarantee thorough coverage. The image is first captured, and then it is filtered to create a zone with specified height and width. Only cars that are in this predefined range are found and counted. The area's measurements are the same in all of the photos that were taken. The OpenCV library plays a major role in object detection; it also draws a rectangular box around things that are discovered. As seen in Figure below, this graphic representation helps to verify that the thing that camera image capturing object detection vehical count signal switching has been identified is, in fact, a vehicle.

Fig 3.2 Vehicle Detection
The Raspberry Pi board receives the car count that was collected from each of the four sides of the road as input. Here, the Raspberry Pi compares the output from each image to determine the cumulative count. The model includes pre-established threshold values. Static signal switching is applied, giving each signal an equal switching time, if the cumulative count is within certain bounds. When traffic is evenly distributed or heavily packed on both sides, this happens. However, dynamic signal switching is triggered if the cumulative count exceeds the threshold. Switching times in dynamic switching are set by the level of traffic congestion. The model is built with the knowledge that different signal sites have varied traffic conditions, which calls for dynamic threshold value modifications. The model automatically learns to adjust and set threshold values depending on the current traffic density at each signal using iterative computing procedures. The camera's picture collection and selection procedure, together with the succeeding phases of detection and counting, are depicted in Figures 3.2. Achieving the main goal of real-time signal monitoring and with the succeeding phases of detection and counting, are depicted in Figures 3.2. Achieving the main goal of real-time signal monitoring and adjustment based on traffic circumstances requires these actions.
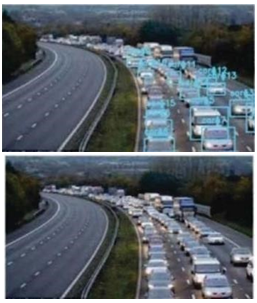
Fig 3.2 Input video and Output of the input video

III. YOLO
YOLO (You Only Look Once) is a powerful network that is specifically made for object detection and has very high prediction accuracy. By fusing parts of SSD and R-CNN, YOLO improves speed, effectiveness, and overall performance. Users can precisely locate things in an image as well as identify them thanks to YOLO's object detection system. Furthermore, even in situations where objects are rotated up to 360 degrees, YOLO can recognise objects regardless of their orientation thanks to its rigorous training with large datasets. Because of its exceptional efficiency, it can even accurately discriminate between things that are very close to one another. YOLO takes a more effective approach t han the traditional practice of applying classifiers to each image separately for prediction. It takes a single, deliberate look at the entire image. YOLO creates a MxM grid by partitioning the image into several parts. YOLO predicts a confidence score for object existence by methodically applying its algorithm to each partition using this grid.
This confidence score functions as a gauge to determine whether or not an object is found inside the partition. These confidence scores show how well YOLO recognises things in the image. Precision measures prediction accuracy, whereas recall measures the model's capacity to correctly identify all positives, or how well it detects objects. These metrics are used by YOLO to evaluate its predictions. YOLO uses Intersection over Union (IoU), a metric that assesses the accuracy of object detectors on certain datasets, to improve performance. IoU guarantees accurate detection of objects even at close range without sacrificing model accuracy. YOLO is made up of two main parts: SSD and R-CNN. R- CNN uses a selective search technique to provide bounding boxes that are accurate and unquestionably include objects. However, SSD speeds up the processing of images. YOLO is an object detection network that uses several region proposals, unlike other region proposal classification networks like fast RCNN, whose architecture is more like a fully convolutional neural network (FCNN). It runs the full image through FCNN once, producing predictions in a grid format with multiple rows and columns. The input image is divided into a MxM grid by this design, which produces two bounding boxes and associated class probabilities for each grid cell.
IV. SIGNAL SWITCHING
The method sets the default signal timings on the first run and modifies them thereafter. Signal timing and vehicle detection are handled by different threads. Detection threads take a snapshot of the next direction, analyse the data, and set the next green signal timer when the current one expires. When the timer for the next signal hits zero, the image is captured. This gives five seconds for processing, vehicle detection, and determining the best signal timing based on acceleration and speed of the vehicle.

where
- GST is green signal time.
- Number Of Vehicles Of Class is the number of vehicles of each class of vehicle at the signal as detected by the vehicle detection module.
- Average Time Of Class is the average time the vehicles of that class take to cross an intersection
- Number Of Lanes is the number of lanes at the intersection.
Conclusion
By minimising vehicle congestion through creative solutions, the Real-Time Traffic Signal Monitoring & Handling system seeks to ease traffic challenges that are common in both urban and rural locations. With just a camera and a Raspberry Pi board needed for hardware setup, this project ensures mobility and simplicity of use without needing the installation of extra gear. The trained model allows for effective traffic control without interfering with traffic flow. Even though the model might need more time to train, once it is implemented, it responds more quickly. It calculates the best timing for all roadside signal switches intelligently, resulting in the least amount of time that commuters must wait and easier traffic flow.
References
[1] Zhang, Hao, et al. \"Real-time traffic flow prediction with spatio-temporal correlations using big data.\" Transportation Research Part C: Emerging Technologies 54 (2015): 275-287. [2] Ayub, Usman, et al. \"Dynamic traffic signal control using adaptive neuro-fuzzy inference system.\" Procedia Computer Science 60 (2015): 1431-1440. [3] Ozbay, Kaan, et al. \"An adaptive real-time traffic control system using reinforcement learning.\" Transportation Research Part C: Emerging Technologies 52 (2015): 77-91. [4] Gao, Y., et al. \"Real-time traffic flow prediction with online sequential extreme learning machine.\" IEEE Transactions on Intelligent Transportation Systems 16.4 (2015): 2191-2203. [5] Kusuma, Jaya, et al. \"An artificial neural network approach for real-time traffic prediction using GPS probe data.\" Transportation Research Part C: Emerging Technologies 53 (2015): 161- 175.
Copyright
Copyright © 2024 Yogesh Ghodke, Shubham Khade, Abuzar Shaikh, Prof. Snehal Khartad. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET64790
Publish Date : 2024-10-25
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online