

Ijraset Journal For Research in Applied Science and Engineering Technology
Remote Controlled Agricultural Robot
Authors: Shreyansh Mishra, Amar Shete, Shravyasri , Vijaykumar Bhanuse
DOI Link: https://doi.org/10.22214/ijraset.2024.62180
Certificate: View Certificate
Abstract
The Agri Bot project presents a pioneering endeavor in the realm of autonomous agriculture by seamlessly integrating robotics, IoT, and mobile application development. Utilizing an Arduino UNO microcontroller, ESP32 camera module, servo motors, and various sensors, the system excels in executing precise agricultural tasks such as digging, filling, seed sowing, and fertilizer dispensing. The accompanying mobile application, developed through MIT App Inventor and utilizing Bluetooth communication, provides an intuitive interface for users to remotely oversee and manage the Agri Bot\'s operations. Beyond its successful hardware and software integration, the project holds transformative potential for traditional farming practices, evident in the incorporation of advanced technologies such as obstacle detection sensors and machine learning for crop recognition. The modular design and collaborative potential of swarm robotics hint at scalability and adaptability for evolving agricultural needs. As the project lays the groundwork for autonomous agriculture, future prospects include autonomous navigation, sustainable power solutions, data analytics for decision support, and enhanced remote monitoring. Collaboration with agricultural experts and ongoing refinements based on real-world feedback are crucial for optimal deployment in diverse farming environments. The Agri Bot project represents a significant milestone in the convergence of technology and agriculture, heralding a future where autonomous systems play a central role in shaping the agricultural landscape.
Introduction
I. INTRODUCTION
In response to the evolving demands of modern agriculture, the Agri Bot project emerges as a groundbreaking initiative, seamlessly blending robotics, Internet of Things (IoT) technology, and mobile application development. The project centers around the integration of innovative hardware components, including an Arduino UNO microcontroller, an ESP32 camera module, servo motors, and an array of sensors. Designed to address contemporary farming challenges, the Agri Bot exhibits a remarkable capacity for executing precise agricultural tasks such as digging, filling, seed sowing, and fertilizer dispensing. The core of the project extends beyond its hardware configuration to the development of a user-friendly mobile application. Crafted using MIT App Inventor and leveraging Bluetooth communication, the application provides an intuitive interface for users to remotely supervise and control the Agri Bot's operations. This introduction sets the stage for an exploration into the project's multifaceted contributions to the realm of autonomous agriculture, where technological integration meets the practical needs of modern farming practices. Beyond its immediate successes in hardware and software integration, the Agri Bot project holds the promise of revolutionizing traditional farming methods. This is evidenced by the incorporation of advanced technologies such as obstacle detection sensors and machine learning algorithms for crop recognition. The modular design and collaborative potential of swarm robotics suggest scalability and adaptability, reflecting a forward-looking approach to meet the evolving challenges of the agricultural landscape. As the Agri Bot project lays the foundation for autonomous agriculture, it unveils potential avenues for future development, ranging from autonomous navigation to sustainable power solutions and data analytics for informed decision- making. Collaboration with agricultural experts and continuous refinement based on real-world feedback underscores the project's commitment to practical and impactful deployment in diverse farming environments. The Agri Bot project stands as a testament to the fusion of technology and agriculture, offering a glimpse into a future where autonomous systems play a central role in enhancing the efficiency, sustainability, and productivity of farming practices.
II. LITERATURE REVIEW
Gulam Amer et al.[1], In recent times, there has been a notable rise in the use of robotics within the agricultural sector, particularly through the application of precision agriculture concepts. The adoption of this emerging technology is driven by the primary objective of automating farming processes to save time and energy associated with repetitive tasks. Furthermore, the implementation aims to enhance yield productivity by treating each crop individually, aligning with the principles of precision farming. The design of these agricultural robots is tailored to specific approaches, taking into account the unique considerations of the agricultural environment in which they operate.
This paper delves into the discussion of these considerations and various approaches employed in the development of such robots. Additionally, it introduces a prototype of an autonomous Agriculture Robot, meticulously designed for the specific task of seed sowing. The robot, a four- wheeled vehicle, is under the control of an LPC2148 microcontroller. Its functionality is grounded in precision agriculture, facilitating efficient seed sowing at optimal depths and distances between crops and rows, customized for each crop type.
Smita et al.[2], The agricultural sector in India, integral to its economy, faces challenges like labor shortages and low productivity. To address these issues, mechanization and automation have become imperative. Manual farming practices lead to worker fatigue and inefficiencies, prompting a shift towards user-friendly automatic solutions. Sowing, a critical farming operation, relies on traditional methods with inherent limitations. Automatic seed sowing machines emerge as a transformative solution, offering simultaneous operations, cost savings, and increased efficiency. A comparative analysis underscores the advantages of automatic machines over manual and animal-drawn counterparts. Future recommendations include sensor-based automation, solar power integration, and design considerations for lightweight, rust-free materials. In conclusion, the literature review emphasizes the pivotal role of automatic seed sowing machines in revolutionizing agriculture, addressing current challenges, and guiding future innovations.
A.O.Hannure et al.[3], The study introduces an innovative approach to address challenges in plant nurseries by proposing an automatic seed feeder mechanism. In the current agricultural landscape, issues such as labor scarcity, low productivity, and manual-intensive seed feeding processes impact plant nurseries. The conventional manual approach involves time-consuming tasks like individually placing seeds in trays filled with coco peat powder. The automatic seed feeder, however, offers a streamlined solution with a custom-designed belt conveyor system and conical-shaped holes to efficiently transfer seeds from the hopper to the tray. This mechanism minimizes seed spillage through the incorporation of a stripper plate, ensuring a precise and efficient seed feeding process. The proposed system aims to revolutionize traditional seed feeding practices, providing advantages such as reduced plantation time, increased productivity, enhanced efficiency, and cost-effectiveness. The block diagram illustrates a simple yet robust design, emphasizing its potential to significantly decrease manual efforts and time requirements in plant nurseries. In conclusion, the automatic seed feeder represents a pivotal advancement in modernizing and optimizing seed feeding processes, offering a practical and efficient solution for the agricultural sector.
The outlined research introduces an innovative approach to agricultural challenges in India through the development of a multipurpose agricultural robot based on the Internet of Things (IoT). In the work by B. Sai Yaswanth et al.[4], the authors address the significance of agriculture in the Indian context, positioning the country as a global leader in farm output. The proposed agricultural robot aims to streamline essential tasks like seed sowing, grass cutting, and pesticide spraying while incorporating IoT functionalities for real-time crop monitoring. Notably, the study highlights the role of machine learning in assisting non-technical farmers with crop selection based on environmental parameters. Additionally, the integration of solar panels underscores the commitment to sustainable and renewable energy sources. The research emphasizes the potential of this IoT-based agricultural robot to optimize farm operations, reduce costs, and empower farmers with cutting- edge technologies.
Agricultural robotics has emerged as a promising innovation, offering vast opportunities to enhance productivity in the field. In the paper authored by Yuvraj V. et al.[5], the authors present a comprehensive review of the design and implementation of an agriculture robot. The prototype robot showcased in the study is designed to execute essential agricultural tasks such as seed sowing, ploughing, and water spraying. The system utilizes a regulated DC power supply (12V) to energize both the Arduino microcontroller and DC motors connected to the robot's wheels. Notably, Bluetooth connectivity facilitates instructions transmitted through a mobile phone, providing a user-friendly interface. The authors emphasize the potential of this low-cost, portable, and multipurpose robot to significantly assist farmers, reducing labor costs and improving overall efficiency.
In the paper authored by Chandana R et al. [6], the focus is on designing a multipurpose agricultural robot for tasks such as automatic ploughing, seeding, and plant health monitoring. Acknowledging the critical role of agriculture in the Indian economy, the authors highlight the challenges faced by traditional farming methods, including labor shortages and the need for soil testing knowledge. The proposed robot integrates microcontroller technology, HC-05 and HC-06 Bluetooth modules, and various sensors to execute farming processes autonomously.
The robot detects the planting area using sensors, utilizes a gripper arrangement for precise seed placement, and subsequently performs tasks like leveling the mud. Emphasizing the potential benefits of this automated system, the authors envision enhanced accuracy in farming processes, contributing to the overall efficiency of agricultural operations.
III. METHODOLOGY
A. Components
- Arduino UNO: Arduino UNO is one of the type of microcontrollers. It is fundamentally based on the ATmega328P. Arduino UNO microcontroller has 14 Input/output pins. Six pins are used for analogue input, while six pins are used for pulse width modulation. Additionally, it has a USB port for uploading code and a power jack for a five-volt power source, among other things. To transmit and receive data from one component to another, we link every component (sensors, relay, motor driver, servo motor, etc.) to the Arduino. Arduino is also used to supply the components with 5-volt power and a ground connection. Therefore, Arduino is utilized to make appropriate synchronization with all other components as well as to control all robot actions.
- Motor Driver: Robots employ L298n motor drivers, which operate under an H-bridge architecture. Through the L298n driver's four pins, we may direct the two or four motors (two pins for one motor) (clockwise or anti- clockwise). and it includes two enable pins that allow us to adjust the motor speed or vary the speed of the motors in accordance with our needs. The Arduino UNO was given a power source to run the motor driver, which operates on 12-volt electricity.
- DC Motor: We are using four simple BO-DC motor. To control the motion of robot we used BO motors. Main working is to move robot in forward, left, and right direction and they convert electrical energy into mechanical energy.
- Pump: A pump is a mechanical device is. It is a 9-volt DC motor that is turned on. We utilised a water pump to put out the fire. It is a straightforward DC motor pump used to put out fires.
- Relay: The 5-volt SPDT relay in our project serves as a key component, acting as an electronic switch powered by a 9-volt battery. Specifically, it plays a vital role in controlling the water pump, seamlessly switching the circuit on and off as needed, especially in response to fire detection.
- Motor Driver: The L298N is a popular motor driver integrated circuit (IC) frequently used in robotics and electronics projects. It's designed to control the speed and direction of DC motors and stepper motors. The L298N can handle higher currents and voltages, making it suitable for a wide range of applications. It features dual H-bridges, allowing you to drive two motors independently, and it offers built-in protection against back electromotive force (EMF) and overcurrent conditions. With its versatility and reliability, the L298N motor driver is a valuable component for hobbyists and engineers looking to control motors in their projects.
- ESP32 Cam Module: The ESP32-CAM module is a versatile and compact development board based on the ESP32 microcontroller that incorporates a camera, making it a powerful tool for various IoT and DIY projects. This module enables wireless connectivity and image capture, which can be used for applications like video streaming, home security, and surveillance. It features an OV2640 camera sensor, microSD card slot for storage, and GPIO pins for customization. With built-in Wi-Fi and Bluetooth capabilities, the ESP32-CAM is a popular choice among makers and developers for building cost- effective, internet-connected camera solutions.
- Bluetooth Module: A Bluetooth module is a compact electronic device designed to enable wireless communication between electronic devices over short distances. Utilizing Bluetooth technology, these modules facilitate the exchange of data, such as files, audio, and other information, without the need for physical connections like wires or cables. Bluetooth modules are commonly integrated into various electronic devices, ranging from smartphones and laptops to embedded systems and IoT devices. They operate on the globally standardized Bluetooth protocol, allowing for seamless interoperability across different manufacturers and devices.
B. Theory
- Seed Sowing: In the seed sowing phase, Agri Bot begins by digging the land, creating an optimal environment for seeds to take root. The excavated soil is then carefully replaced to form a stable seedbed. Next, the robot precisely places seeds along with fertilizers, promoting uniform growth. Watering follows, ensuring seeds receive the necessary moisture for germination.
- Grass Cutting: Agri Bot's grass-cutting task is driven by the need for weed management. By cutting unwanted grass, the robot ensures crops receive ample sunlight and reduces competition for water, aligning with principles of effective weed control.
- Liquid Fertilizing: The liquid fertilizing function is geared toward delivering essential nutrients directly to plants in a readily absorbable form. This approach optimizes nutrient uptake efficiency, meeting plant requirements at different growth stages. Additionally, Agri Bot's liquid fertilizing aligns with precision agriculture, minimizing resource wastage and contributing to sustainable farming practices. The robot aims to enhance crop productivity through practical applications of agricultural science.
C. Flowchart

The proposed flowchart for the Agri Bot project encapsulates the agricultural system's operational sequence. The initiation involves the comprehensive initialization of components and bluetooth connectivity, encompassing the Arduino microcontroller, ESP32 camera module, servo motors, ultrasonic sensor, and various other critical elements. Subsequently, the ESP32 camera module is activated to capture a live feed, which is then streamed to a mobile application via an established IP address, showcasing real-time monitoring capabilities. In parallel, the ultrasonic sensor performs obstacle detection in the bot's frontal vicinity, crucial for dynamic course adjustments. The heart of the communication system lies in the reception of commands from the mobile application, facilitated by Bluetooth connectivity. These commands undergo interpretation to discern the desired agricultural task, be it sowing, grass cutting, or fertilizing.
Upon command interpretation, the system seamlessly executes the specified task, highlighting the agility and adaptability of the Agri Bot. Whether it is sowing seeds, cutting grass, or dispensing fertilizer, the bot's actions are orchestrated in response to user instructions received via Bluetooth. A pivotal feature is the display of task completion notifications, ensuring the user is informed when the Agri Bot concludes its designated operations. The program concludes by seamlessly terminating its execution, signifying the successful completion of the tasks. This flowchart effectively illustrates the interconnected processes, emphasizing the dynamic responsiveness of the Agri Bot to user commands and its ability to autonomously perform complex agricultural tasks.
D. Block Diagram
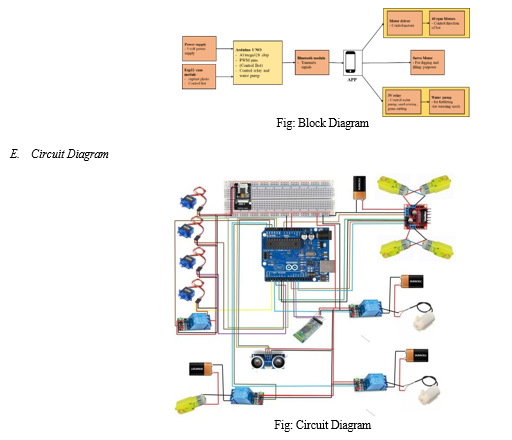
The Agri Bot project utilizes an Arduino UNO microcontroller as the central control unit, responsible for coordinating the functionalities of various components. It receives inputs from sensors and relays signals to actuators, enabling the bot to perform essential agricultural tasks. The ESP32 camera module serves as the system's visual perception system, showing the live feed to user. If an obstacle is identified, the ultrasonic sensor, another crucial component, measures the distance to the obstacle and generates a signal to the Arduino UNO. Upon receiving the signal, the Arduino UNO halts the bot's movement, preventing potential collisions. Four servo motors play pivotal roles in the Agri Bot's operations. The first servo motor adjusts the depth of the pipe used for seed planting, ensuring consistent planting depth across the field. The second servo motor fills the sand after digging. The third servo motor precisely dispenses seeds into the land, ensuring accurate placement and maximizing germination rates. The fourth servo motor distributes water around the seeds, providing essential nutrients for plant growth.
Four 40 RPM DC motors, powered by the 12 Volt source, drive the Agri Bot's locomotion. They are connected to an L298N motor driver, which regulates their speed and direction. This enables the bot to navigate the field efficiently and perform grass cutting, sowing, and fertilization tasks accurately. A 5V relay controls the grass cutter DC motor, which trims the grass surrounding the planted seeds, maintaining a clean and healthy environment for plant growth. Two 9V mini water pumps, connected to 5V relays, provide a constant supply of water to the seeds during planting and fertilizer to the plants during their growth cycle. The relays receive signals from the Arduino UNO, enabling precise control over the water and fertilizer application.
The Agri Bot's circuit diagram meticulously connects each component, ensuring seamless communication and coordination. The Arduino UNO serves as the central hub, receiving signals from sensors, processing information, and relaying commands to actuators. This interconnected network enables the Agri Bot to perform a variety of agricultural tasks autonomously, revolutionizing the way crops are tended to and improving agricultural productivity.
F. App
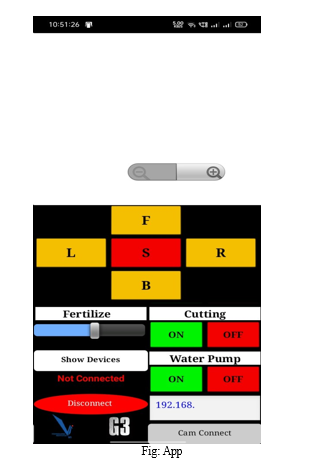
The Agri Bot project incorporates a user- friendly mobile application developed using MIT App Inventor to provide comprehensive control over the bot's operations. The app's intuitive interface features an array of buttons, sliders, and a live camera feed, enabling users to seamlessly command the bot's movement, monitor its surroundings, and manage various agricultural tasks. Directional control buttons allow users to effortlessly guide the bot's movement, maneuvering it forward, backward, left, and right. A dedicated camera window displays a live feed from the ESP32 camera, providing users with real- time visual feedback of the bot's surroundings, enhancing situational awareness and enabling obstacle avoidance. Four ON/OFF buttons facilitate precise control over the bot's relays, each corresponding to specific tasks. Activating the grass cutter relay initiates grass trimming, maintaining a tidy environment around the crops. Engaging the water pump relays ensures timely and controlled water application to the seeds during planting and fertilizer to the plants during growth. The sowing servo relay activation triggers seed dispensing, ensuring accurate seed placement. Three sliders provide granular control over the servo motors, enabling users to adjust the depth of land, regulate the filling of the land with sand, and control the distribution of fertilizer. These adjustments optimize planting conditions and ensure optimal nutrient delivery for plant growth. Bluetooth connectivity serves as the communication backbone between the mobile app and the Agri Bot, enabling wireless transmission of commands and data. This wireless interface streamlines control, allowing users to operate the bot from a safe distance while maintaining real- time monitoring capabilities.
In essence, the MIT App Inventor-based mobile application serves as the Agri Bot's command center, providing a user-friendly and intuitive interface for controlling the bot's movement, monitoring its surroundings, and managing various agricultural tasks, revolutionizing the way crops are tended to and enhancing agricultural productivity.
G. Algorithm
The Arduino code developed for the Agri Bot project represents a pivotal element in the implementation of the autonomous agricultural system. The code begins by incorporating essential libraries for SoftwareSerial and Servo control, setting the foundation for seamless communication and precise motor control. It initializes key pins for servo motors, Bluetooth communication, and motor control, ensuring an organized and efficient hardware setup. The inclusion of global variables, such as servo positions, Bluetooth data, and motor speed, underscores the adaptability and configurability of the system. The setup function further establishes the groundwork by attaching servo pins and configuring motor control pins as outputs, while also initializing serial communication for both USB and Bluetooth interfaces. Within the loop function, the code interprets incoming Bluetooth data, dynamically adjusting servo positions for digging, filling, and fertilizer dispensing based on the received information. Moreover, it responds to numeric commands, enabling the Agri Bot's movement and controlling various components, including water pumps, sowing mechanisms, grass cutters, and fertilizer dispensers. This algorithmic framework encapsulates the code's ability to seamlessly integrate hardware components, interpret Bluetooth commands, and execute precise agricultural tasks through servo and motor control, marking a significant advancement in autonomous agricultural technology.
IV. RESULTS AND DISCUSSION
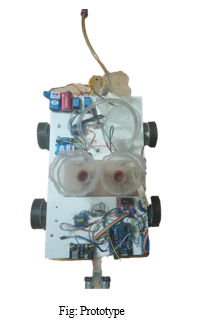
The implementation of the Agri Bot project has yielded promising results, showcasing the successful integration of various hardware components and the seamless execution of agricultural tasks. The system effectively utilizes an Arduino UNO microcontroller as the central processing unit, interfacing with an ESP32 camera module for obstacle detection and providing a live feed for remote monitoring through a dedicated mobile application. The inclusion of ultrasonic sensors ensures the timely halting of the bot in the presence of obstacles, enhancing the safety and efficiency of its operations. The four servo motors, each assigned specific agricultural tasks, demonstrated precise control over digging depth, sand filling, seed sowing, and fertilizer dispensing. The integration of four 40 RPM DC motors regulated by the L298N motor driver facilitated smooth bot locomotion, enabling precise navigation across agricultural fields. Additionally, a dedicated DC motor for grass cutting, two 9-volt mini water pumps for targeted water supply and fertilizer dispersion, and four 5-volt relays for controlling various components were effectively incorporated into the system. The mobile application, developed using MIT App Inventor and employing Bluetooth communication, serves as an intuitive control interface. Users can effortlessly manage the Agri Bot's direction, monitor the live camera feed, and activate/deactivate specific agricultural tasks through a user-friendly interface. The incorporation of sliders for servo motor control and buttons for relay activation provides a versatile and adaptable control mechanism.
The successful implementation of the Agri Bot project underscores its potential as an innovative solution in the realm of autonomous agriculture. The integration of advanced technologies such as the ESP32 camera module and ultrasonic sensors enhances the bot's ability to navigate and operate efficiently in dynamic environments. The precise control offered by servo motors ensures the accurate execution of tasks critical to agricultural processes, including digging, sowing, and fertilizing. The modular design of the system, featuring dedicated components for each agricultural task, provides a scalable framework that can be customized based on specific farming requirements. The use of Bluetooth communication for remote control via a mobile application enhances the accessibility and user-friendliness of the Agri Bot, allowing farmers to manage agricultural operations with ease.
V. FUTURE SCOPE
The Agri Bot project holds significant promise for future innovations in autonomous agriculture. Key areas for development include implementing autonomous navigation algorithms for optimized field trajectory and integrating machine learning for crop recognition in precision agriculture. Addressing energy efficiency through sustainable power solutions, such as solar panels, is crucial for minimizing environmental impact. Enhancements to the mobile application, like real- time data visualization, can offer comprehensive remote monitoring. Exploring swarm robotics and integration with smart agriculture platforms can amplify operational efficiency. Improving obstacle detection and introducing weather-adaptive functionality are vital for enhancing versatility. Collaboration with experts for field trials and feedback will refine capabilities, contributing to the evolution of sustainable farming practices.
VI. ACKNOWLEDGMENT
We would like to express our sincere gratitude to Prof. Vijaykumar Bhanusae for his invaluable guidance and unwavering support throughout the development of the Agri Bot project. His expertise, encouragement, and commitment have been instrumental in shaping the project and navigating its complexities. Prof. Bhanusae's passion for innovation and dedication to fostering a collaborative learning environment have significantly contributed to the success of this endeavor. We are truly fortunate to had the opportunity to work under his mentorship, and his insights will undoubtedly resonate in the continued evolution of this project.
Conclusion
In conclusion, the Agri Bot project stands as a remarkable achievement in the realm of autonomous agriculture, successfully integrating robotics, IoT, and mobile application development to address contemporary farming challenges. The implemented system, featuring an Arduino UNO microcontroller, ESP32 camera module, servo motors, and various sensors, has demonstrated its capability to execute precise agricultural tasks such as digging, filling, seed sowing, and fertilizer dispensing. The mobile application, developed using MIT App Inventor and utilizing Bluetooth communication, provides an intuitive control interface for users to remotely manage the Agri Bot\'s operations. The success of the Agri Bot project is not only evident in its hardware and software integration but also in its potential to revolutionize traditional farming practices. The inclusion of advanced technologies, such as obstacle detection sensors and machine learning for crop recognition, hints at the project\'s scalability and adaptability for future agricultural needs. The modular design, coupled with the collaborative potential of swarm robotics, suggests a pathway toward more extensive and efficient agricultural operations. As the project lays the groundwork for autonomous agriculture, its impact extends to practical applications and highlights the evolving role of technology in shaping the future of farming. The Agri Bot project marks a promising milestone in the fusion of technology and agriculture, showcasing a future where autonomous systems play a pivotal role in enhancing the efficiency and sustainability of farming practices.
References
[1] Gulam Amer, S.M.M. Mudassir, M.A. Malik, \"Design and Operation of Wi-Fi Agribot Integrated System\", IEEE International Conference on Industrial Instrumentation and Control, May 2015. [2] Smita N. Solanki , R. T. Ramteke, Pragati S. Dhande Agricultural Automatic Seed Sowing Machine: A Review. International Journal of Research in Engineering, Science and Management. Volume 5, Issue 2, February 2022. [3] A.O.Hannure, S.P.Kshirsagar, V.S.Kodam, O.N.Patange, V.S.Nakod, Literature Review on Automatic Seed Feeder, International Journal of Engineering Trends and Technology (IJETT) – Volume 36 Number 7- June 2016. [4] Bysani Sai Yaswanth, N. Pruthvi Raj, B. P. Rahul, Venktesh M. Moger, and B. T. Venkatesh Murthy, Solar Power Based Agriculture Robot for Pesticide Spraying, Grass Cutting and Seed Sowing, September 2022. [5] Yuvraj Vilas Deshmukh, Vaishnavi Sudhir Ghodke, Yamini Bharat Deore, and Abhilash, A Review paper on Design and Implementation of Agriculture Robot, IJARIIE-ISSN(O)-2395- 4396, Vol-8 Issue-2 2022. [6] Chandana R, Nisha M, Pavithra B, Sumana Suresh, and Nagashree R N, A Multipurpose Agricultural Robot for Automatic Ploughing , Seeding and Plant Health Monitoring, International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 Published by, www.ijert.org IETE – 2020. [7] Abhijit Phaltane , Gopal Kayasth , Anil Dapekar, FABRICATION AND IMPROVEMENT IN AGRICULTURE MACHINE, International Journal of Advance Research in Science and Engineering Volume No.07, Special Issue No.05, March 2018. [8] Abdulrahman, Mangesh Koli, Umesh Kori, Ahmadakbar, Seed Sowing Robot. International Journal of Computer Science Trends and Technology (IJCST) – Volume 5 Issue 2, Mar – Apr 2017 [9] Punam K. Jadhav, Shivani S. Deshmukh, Prerana N. Khairnar, SURVEY PAPER ON AgRo-Bot AUTONOMOUS ROBOT, International Research Journal of Engineering and Technology (IRJET) Volume: 06 Issue: 12| Dec 2019
Copyright
Copyright © 2024 Shreyansh Mishra, Amar Shete, Shravyasri , Vijaykumar Bhanuse. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62180
Publish Date : 2024-05-15
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online