

Ijraset Journal For Research in Applied Science and Engineering Technology
Remote Underwater Robot
Authors: Vulugundam Anitha, Noora Raalah, Jeedipally Vaishnavi, Manusani Sharanya, Gande Sneha
DOI Link: https://doi.org/10.22214/ijraset.2023.54657
Certificate: View Certificate
Abstract
The army, navy, and many other scientific applications use oceanographic robots today, and they also make significant contributions to sustainable development. By keeping an eye on the water\'s physical and chemical characteristics, it hopes to protect underwater life and create a safe home for marine species. In this paper, an oceanic robot is built with all of the aforementioned features that can be produced cheaply and benefit marine life. Our method suggests a reasonably priced, small, sensor- and camera-equipped underwater remote-controlled drone. The system is integrated for use in surveillance and is meant to assess water characteristics like temperature and salinity of ocean waters. The data is gathered by the salinity sensor and sealed digital temperature probe and transmitted to the Raspberry Pi microcontroller. The necessary sites receive the data and process it for further analysis. Information is transferred from the water to the land using a miniature router. The camera in the RUR is a high-resolution, real-time camera that transmits the images it has collected in real-time in response to user requests via the Raspberry Pi and ZigBee Wireless chip. Electronic Speed Controller (ESC) is used to control and regulate the speed of an electric motor.
Introduction
I. INTRODUCTION
The increased use of robotics and automation has a number of benefits and has caught the interest of both business and academic programs. By introducing a number of cutting-edge & distinctive methods of robot control, the observations on various strategies of controlling robots have achieved quite a few successes. These days, underwater robots are really useful. They can be programmed to travel too far, hazardous, and frequently uncharted areas of the ocean in order to measure its key. For underwater robots to become the vast and coordinated ocean monitoring network that Fischell envisions, they need to form underwater ‘swarms’ that move through the ocean—not unlike schools of fish. [1-3]
On land, swarming has already showed promise in disaster relief efforts and other applications, but due to fundamental physics, we haven't been able to apply it to the ocean yet. If you put one of these little ocean robots down there for an hour, it can end up being a kilometre away from where you believe it is because they can drift hundreds of metres every ten minutes. There are several underwater robots available for less than $10,000 [4-6]. In order to get several of these vehicles functioning together for less money than some of the larger and more complicated robots we've had to rely on, we will need to optimise our technology and processes.
II. REMOTE UNDERWATER ROBOT
Remotely controlled vehicle is known as ROV. ROVs are underwater vehicles that can be controlled from the water's surface and used to explore the depths of the ocean. Robotic underwater vehicles, or ROVs, are unmanned and very manoeuvrable. ROVs can transmit photos and video back to the ship since they are outfitted with at least a still camera, a video camera, and lights. Because operators may remain secure (and dry!) on ship decks, ROV operations are easier and safer to execute than diving operations. ROVs allow us to investigate areas that are too deep for humans to safely dive themselves. [7-11]
The objective of this paper was to develop and construct a student-operated, low-cost, user-friendly, portable, safe, and dependable ROV that could be used for scientific research. In order to gain a sense of how ROVs operate, we deployed ROV systems from the RSL. To learn what was needed in a ROV and what to consider when designing one, a thorough survey was done with prospective users, current users, and industry experts. We created a number of rough draughts of potential ROV designs, built a number of prototypes, and solicited input from our customer on each concept.
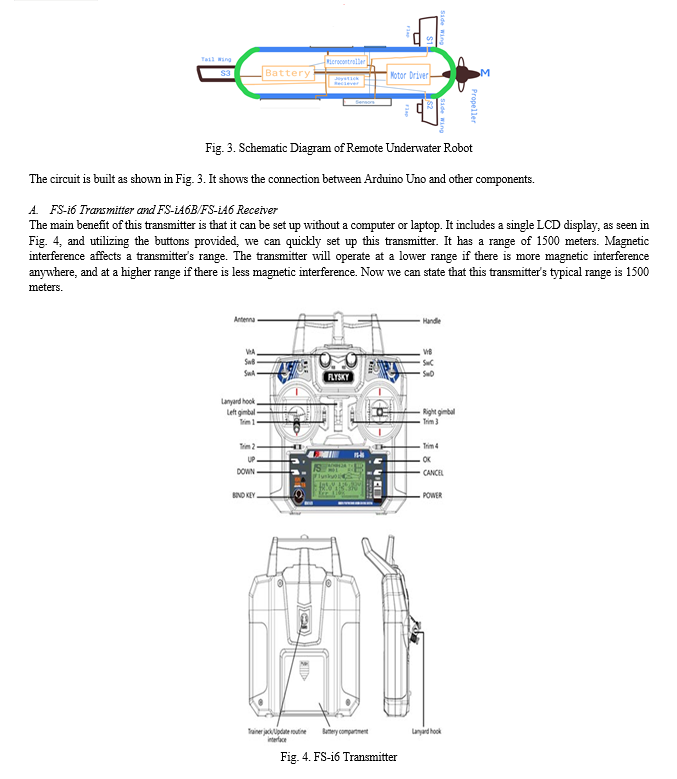
Remote Underwater Robot is used for marine applications. This system is to be implemented using the Arduino uno microcontroller. This robot is designed to monitor features like temperature, salinity and surveillance. The values of temperature and salinity are displayed on the LCD. The robot is controlled using the joystick to move it for surveillance. The robot is developed using a simple block diagram of these basic components is shown in Fig. 1.
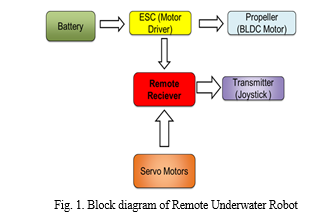
As seen in Fig. 1, a microcontroller, motor drivers, communication protocol converter, and video feed amplifier are all housed in a primary electronics bottle. The microcontroller manages the sensors, lights, and camera. The thrusters are managed by the motor drivers. The entire system is powered by a battery pack that is mounted in a separate bottle. The microcontroller gets instructions from the topside station to operate various parts and drive thrusters. It also gathers and transmits sensor data. This tether, which connects the ROV to the topside console, is made comprised of a communication wire and a camera feed. Three topside control methods are intended for the ROV.
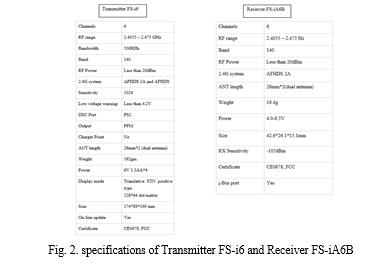
ROV uses motors and propellers [2] to move through water. Combination of such propellers and motors are called thrusters. Nozzles are thrusters that have a cowling attached to them and blades that are precisely designed to fit the interior of the cowling. Propellers have specific qualities that help determine the best combination for the task and size of the ROV. The specifications of Transmitter FS-i6 and Receiver FS-iA6B are as shown in Fig. 2.
III. WORKING & IMPLEMENTATION OF UNDERWATER ROBOT
The ROV is controlled by the user using radio communication through the FS-I6 remote transmission. The range of diving depth is around 100m-1.5 km and the transmission range is around 1000m. It consists of a thrust generating pump which will be used for translational motion and can be converted in any direction by using directional fins on the left, right and hind of the body. The whole model is extremely compact in size and weight and can be deployed for applications such as follows: Fault Analysis in sophisticated underwater systems like geothermal power plants; Capturing high resolution images for mapping and surveillance; Diving into trenches and to check various physical parameters like temperature and salinity for environmental and social applications.

1) Working
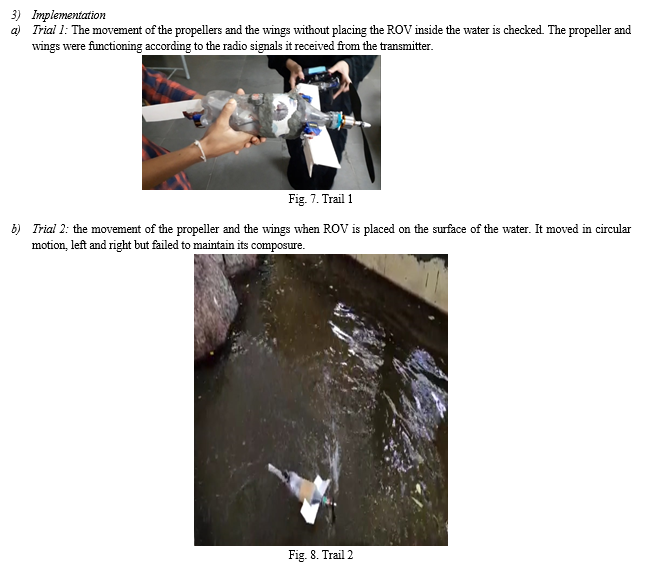
The system is designed in such a way that the main part is covered with waterproof material and the motors are responsible for the movement of the robot. The system is controlled by the transmitter/receiver and operated by the motors. The propeller, side wings on the other hand support for easy and desired movement of the robot. During the movement, externally mounted sensors can collect the information in the water and send it to the microcontroller which displays it on the lcd. Digital trims, backlit LCD screen, and simple programming give the FS-i6 a modern feel with all the features you want. Therefore, the whole system collects basic information of the underwater environment at low cost and efficiently.
The ergonomic design of the ultra-slim casing fits your hands well, reducing hand fatigue, especially on lengthy trips. The FS-i6 is simple to store and there is little risk of breaking it thanks to its low-profile antenna. The radio's comfort features also include adjustable length sticks and a loop for a neck strap. The FS-i6 comes equipped with two adjustable knobs, a 3-position switch, and several flap position options.
The AFHDS2A system contains an automatic identification feature that can change the current mode automatically between one-way and two-way communication. The multiple channel coding and error-correction features of AFHDS2A increase communication stability, lower the error ratio, and increase the range of reliable transmission.
2) Procedure
Step1: Switch on the switch to on battery.
Step 2: Bind the ESC to transmitter- lower the throttle for two beeps and then move the throttle up till you get four beeps.
Step 4: Put the ROV into the water.
Step 3: The thrust speed of ROV is controlled from the throttle.
Step 5: To move the device left or right, move the back tail right or left respectively using the transmitter sticks.
Step 6: To make the device come up or to change the altitude of the ROV inside the water, use the side wings in up or down motions as required.
Step 7: The ROV is now inside the water, we can now use it for several other applications.

A. Applications Of The Project
There are many applications of underwater remote controlled vehicle.
- Infrastructure upkeep: - The underwater remote camera of the ROV can be used by municipalities and service providers to conduct routine inspections of water tanks, sewer pipes, and storm water/drainpipes.
- Photography: - Underwater photography is done with it. It's used to record the inner beauty of lakes, oceans, etc.
- Search and rescue: - underwater drones used in rescue operations to locate missing bodies during floods, as well as to look for accidentally wrecked pieces of aircraft, ships, etc.
- Aquaculture - Fishermen can use this to inspect the wellbeing of aquatic animals.
- Military operations: - Underwater ROVs can be utilised for surveillance or espionage tasks that are beneficial for military operations.
B. Advantages Of The Project
The main advantages of this project are
- Underwater robots are faster and stronger than humans under the water.
- Children and elder people can easily control the remote without much difficulty.
- Safe and comfortable device under the water.
C. Limitations Of The Project
The limitations of this project are:
- The components used should be of waterproof since it stays in the presence of water for most of the time.
- The device cannot be operated out of the geographical range of transmitter.
- The device cannot be operated using either analog or digital signals but only using radio signals.
- Transmitter and receiver are slightly costly.
Conclusion
Underwater drones perform a very important function in the modern world. For the purpose of this project, a relationship between buoyancy, materials, propulsion, and size was determined. It will also limit human loss due to various underwater applications of drones in the oceans which replaces humans. Research in underwater applications is active both from the technological and methodological point of view. Improved energy and power capability will enable longer missions, higher speed. The goal is to develop fully autonomous, reliable, robust decision-making autonomous drones. There are still communication problems that need to be solved. Here, with the help of the receiver, the movement of the drone can be controlled in the water either left or right, top or bottom using the flaps with the help of servo motors. Further future developments can be developed in the scope of underwater drones by installing various sensors like salinity sensor, camera for security surveillance and temperature sensors. Internal environment of the oceans and seas can be known without the involvement of the humans actually going into the ocean which saves manpower and also avoids various other risks. The design can be 3D printed and can be mass employed for government as well as commercial applications.
References
[1] SaveTheSea. Interesting Ocean Facts. SavetheSea.org. [Online] 2013. [Cited: April 20, 2013.] http://savethesea.org/STS%20ocean_facts.htm. [2] NOAA. Ocean. National Oceanic and Atmospheric Administration. [Online] United States Department of Commerce, April 18, 2013. [Cited: April 20, 2013.] http://www.noaa.gov/ocean.html. [3] Pressure increases with ocean depth. National Oceanic And Atmoshperic Administration. [Online] United States Department Of Commerce, January 11, 2013. http://oceanservice.noaa.gov/facts/pressure.html. [4] Yuh, J. and S.K. Choi (1999). Semi-Autonomous Underwater Vehicle for Intervention Missions, Sea Technology, October, Vol. 40, No. 10, pp. 37- 42. [5] Yuh,. and J. Nie (2000). Application of NonRegressor Based Adaptive Control to Underwater Robots: Experiment, Int \'l J. of Computers and Electrical Engineering, pp. [6] Yang, K. e., J. Yuh, and S.K. Choi (1999). FaultTolerant System Design of an Autonomous Underwater Vehicle -- ODIN: an Experimental Study, Int \'I Journal of Systems Science, Vol 30, No. 9, pp. 1011-1019. [7] Eastern Edge Robotics. “ROV PROGRAM”. December 2010. http://www.marinetech.org/files/marine/files/MIROV2MANUAL.pdf [8] MATE. “Underwater Robotics Competitions”. Spring 2013. http://www.marinetech.org/rov-competition-2/ [9] NOAA. Ocean. National Oceanic and Atmospheric Administration.gov. [Online] United States Department of Commerce, April 18, 2013. [Cited: April 20, 2013.] http://www.noaa.gov/ocean.html [10] IP Ratings with Guide - Industrial, Retail & Commercial Lighting - Wirefield. url:https://www.wirefield.co.uk/ip_ratings.asp (visited on 09/16/2017). [11] Natick High School InvenTeam Awarded U.S. Patent — Lemelson-MIT Program. url:http://lemelson.mit.edu/news/natick-high-school-inventeam-awarded-uspatent.
Copyright
Copyright © 2023 Vulugundam Anitha, Noora Raalah, Jeedipally Vaishnavi, Manusani Sharanya, Gande Sneha. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54657
Publish Date : 2023-07-06
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online