

Ijraset Journal For Research in Applied Science and Engineering Technology
Review Design and Simulation of a Switched Reluctance Motor Using Sensorless Control System
Authors: Mr. Manish Dhawale, K. M. Dhenge , Khushi Khetade, Samiksha Khairkar, Sippy Gajbhiye
DOI Link: https://doi.org/10.22214/ijraset.2024.59297
Certificate: View Certificate
Abstract
This paper mainly introduces the acquisition of the position information of the switched reluctance motor through the inductance, which can make the switched reluctance motor(SRM) correct commutation. The main method is to apply high-frequency and low-duty pulse voltages to the two non-conducting phases of the switched reluctance motor when the motor is in low-speed operation, so that the non-conducting phase generates a response current through the rising slope of the response current The current change rate is obtained by the difference with the falling slope, and then the current change rate is converted into inductance through a formula, and whether the inductance reaches the inductance threshold is judged whether it reaches the commutation position, and the motor is subjected to timely and accurate commutation processing. This method is realized by matlab/simulink simulation, and combined with the high-speed inductance method obtained by the flux ratio current, to realize the position sensorless technology combined with the inductance method in the full speed cycle, and the simulation verifies that the low-speed and high-speed algorithms can be smooth Switch, and can realize its commutation control function, and It provides simulation support for applications such as lawn mower.
Introduction
I. INTRODUCTION
In order to ensure stable operation of a switched reluctance motor, it needs to obtain accurate commutation signals, which requires a position sensor to obtain the position of the rotor. Common position sensors include Hall sensors and encoder sensors. They all convert the real-time position signal of the motor into electrical signals and provide them to the control chip for commutation control. The position sensor ensures the smooth operation of the motor and provides a speed basis for the motor speed control system. But the position sensor still has many shortcomings. First of all, although the switched reluctance motor can operate normally in harsh environments (high temperature, dust), the position sensor is more affected by the harsh environment and its accuracy is reduced, which limits the application of the switched reluctance motor in harsh environments. Nowadays, the main application areas of switched reluctance motors are still in the harsh environments with high dust and high temperature such as coal mines and aerospace [1]-[6]. Secondly, the position sensor increases the cost and volume of the entire control system, which forms a huge obstacle to the promotion and application of the switched reluctance motor, so the research on the position sensorless technology becomes particularly important. At present, many scholars have conducted research on the sensorless technology of switched reluctance motors, and have also proposed many feasible methods, which are gradually moving towards practicality.
Nowadays Switched Reluctance Motor (SRM) becomes more popular among the various electric drives available in the domestic and industrial application due to its simple and robust construction.
The application of the machine, the operation of SR Motor can be categorized in to the low and medium speed operation and high speed operation. The control of SRM drive is developed by the convertor circuit which control excitation of phase by SCS (switching convertor switches). The developed SRM circuit suffers from low power factor and high harmonic capacity which affects the performance of SRM drive. Rotor position of SRM is directly sensed by using sensor is called sensor type SRM. The torque ripples in the SRM are arising, due to phase current commutation.
The simulated performance of SRM drive system is presented to analyse the effect of switch angles on transient and steady state performance of the drive in terms of speed, current and torque response.
A new analytical representation and simulation of the phase inductance of SRM using MATLAB/Mfile is presented. Simulation methods have following advantages.
- It is free from expression
- Can be applied widely
- Demonstrates inductance profile using motor parameters only
- Saves run timeTop of Form
II. PROBLEM IDENTIFICATION
The switched reluctance motor represents one of the earliest electric machines which were introduced two centuries back in the history. The problems associated with the induction and dc machine together with revolution of power electronics and semiconductors in the late sixties of the last century led to the reinvention of this motor and redirected the researchers to pay attention to its attractive features and advantages which helped in overcoming a lot of problems associated with other kinds of electrical machines such as brushes and commutators in dc machines and slip ring in wound rotor inductions machines besides the speed limitation in both these motors. The simple design and robustness of the switched reluctance motor made it an attractive alternative for these kind of electrical machines for many applications recently specially that most of its disadvantages which are mentioned in this project.
III. OBJECTIVES
- Design and Simulation of a Switched Reluctance Motor in Sensor less Control system
- To investigate the developed torque optimization for switched reluctance (SR) motors as a function of various dimensions e.g. pole arc/pole pitch variation, stator shape variation and rotor shape variation.
- To propose the best design for the switched reluctance motor depending on the effect of variation of stator-and rotor pole/pole pitch ratio on the average torque developed by the SRM by using the most effective simulation tools.
- To propose a new controller for SRM. These controllers are independently of any other work.
IV. LITERATURE SURVEY
- Warpatkar and Dalvi [2016] presented a new approach for minimizing torque ripple in an SRM 8/6 poles using computational methods for the design calculation. According to this, the combination of calculations including mechanical, electromagnetic, and electrical design as well as laboratory tests and appropriate investments play an essential role in the development of a successful SRM design.
- Nagesh et al. [2020] modeled and analyzed the SRM 8/6 with a simple PI controller and showed after simulation that torque ripples were reduced for different load values.
- Pratapgiri and Narsimha [2012] have put in evidence that the DTC technique can minimize torque ripple by regulating torque with a specified hysteresis band. A four-phase non-symmetrical converter has a total of 81 space voltage vectors while only 8 space voltage vectors are sufficient to apply the DTC technique to the SRM.
- Ghani et al. [2016] asserted based on the simulation results that the fuzzy logic controller produces better results. When compared to the results obtained by the ANN controller, the torque ripple has become weaker and the current waveform has become smoother.
- In 2015, Shrivastava [2015] used the fuzzy logic controller of the SRM 8/6 in combination with the DTC. This proposed technique reduced torque ripples and current distortion, produced a very fast torque response and good control precision.
This project compares the use of two intelligent speed controls associated with direct torque control (DTC) to minimize torque ripples caused by peripheral discontinuities imposed by the shape of the SRM rotor. The DTC associated with the fractional order controller (PIα) is better than that associated with the controller of the artificial neural network (ANN).
V. PROPOSED SYSTEM
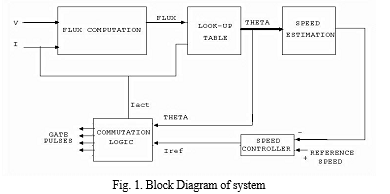
- SRM model is simulated in MATLAB/SIMULINK environment in Sensor-less mode. Flux-current method is used for simulating the model.
- The SRM flux-current characteristics are stored in the form of look-up table. Voltage and current are used for calculating flux; this calculated flux along with current is fed to ψ-i-θ look-up table, which gives rotor position θ as output.
This rotor position along with current is fed to look-up table, which gives torque as output. Rotor position information is obtained from this look up table ψ-i-θ, which is accordingly used for carrying out the commutation of different phases.
VI. SRM SPECIFICATION
A. SRM Drives
Switched reluctance motor (SRM) is a rotating electrical machine and falls under a special class of motor wherein both stator and rotor have salient poles. It is a type of a stepper motor, an electric motor that runs by reluctance torque.
- Stator winding comprises of a set of coils, each of which is wound on one pole. SRM is excited by a sequence of current pulses applied at each phase. The individual phases are consequently excited, forcing the motor to rotate. The rotor does not have any windings or magnets. It is made up of silicon steel, so the inertia of the rotor is very less.
- The stator and the casing are connected to facilitate heat dissipation. The rotor has no complicated structure. The entire motor body is parallel.
- Without permanent magnets, SRM has the advantages of low cost, simple structure and long life compared with permanent magnet synchronous motors.
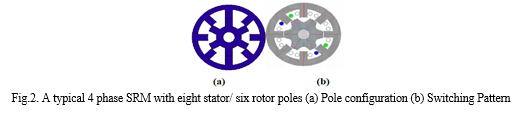
- The stator and rotor structures of common SRM motors include two-phase 4/2 poles, three-phase 6/4 poles.
B. SRM Configurations
- Switched reluctance motors come in different configurations such as 12/8, 8/6, 6/4, and 4/2. But here, our emphasis is on 6/4 configuration.
- This has 3-pole pairs at the stator and 2-pole pairs at the rotor. It is also referred to as 3-phase SRM.
- The SRM is fed by a threephase asymmetrical power converter having three legs, each of which consists of two IGBTs and two freewheeling diodes.
- During conduction periods, the active IGBTs apply positive source voltage to the stator windings to drive positive currents into the phase windings.
- During free-wheeling periods, negative voltage is applied to the windings and the stored energy is returned to the power DC source through the diodes.
- The fall time of the currents in motor windings can be thus reduced. By using a position sensor attached to the rotor, the turn-on and turn-off angles of the motor phases can be accurately imposed.
- These switching angles can be used to control the developed torque waveforms. The IGBTs switching frequency is mainly determined by the hysteresis band.
C. Construction Of SRM Circuit
- In switched reluctance motor the torque is developed because of the tendency of the magnetic circuit to attain the minimum reluctance i.e. the rotor moves line with then stator pole thus maximizing the inductance of the excited coil.
- When a rotor pole is aligned with a stator pole, there is no torque because field lines are orthogonal to the surfaces. If one displaces the rotor of its position, there will be torque production that will tend to bring back the rotor toward the aligned position. If current is injected in the phase when in the unaligned position there will not be torque production.
- If one displaces the rotor of the unaligned position, then a torque tends to displace the rotor towards the next aligned position. The magnetic behaviour of SRM is highly nonlinear.
- But by assuming an idealistic linear magnetic model, the behaviour pattern of the SRM can be easily studied without serious loss of integrity from the actual behaviour pattern. SRM, when compared with the other AC and DC machines has some advantages and limitations.
- Changing the shape and size of stator and rotor
- Dimensional variations for stator and rotor poles
5. Rotor poles for the 3-phase, 6/4 poles SRM. After gathering the results of the highest developed torque for the stator, and the rotor poles, a new SRM optimized design is obtained.
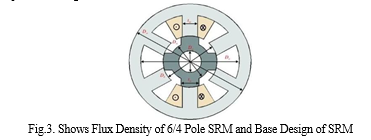
The base design and the optimized design for 3- phase, 6/4 poles SRM. The stator pole arc/pole pitch ratio (β) for the optimized SRM is 0.5; the rotor pole arc/pole pitch ratio???? for optimized SRM is 0.38. Fig.3 shows the flux density through the stator pole, air gap, and rotor for 3- phase, 6/4 poles base and optimized cross section design SRM.
VII. ADVANTAGES
- Switched Reluctance Motors (SRMs) offer several advantages in sensorless control systems:
- Simplicity: SRMs have a simple and robust construction with no windings on the rotor, making them mechanically robust and suitable for high-speed applications.
- High Efficiency: SRMs have a high efficiency over a wide range of speeds and loads, making them suitable for variable speed drive applications where energy efficiency is crucial.
- Sensorless Operation: SRMs can be operated without the need for position or speed sensors, reducing system complexity, cost, and maintenance requirements.
- Fault Tolerance: SRMs are inherently fault-tolerant due to their simple construction and can continue to operate even in the event of a stator or rotor winding fault.
- Adaptability: SRMs are suitable for harsh operating environments, including high temperatures and vibrations, making them suitable for a wide range of industrial applications.
- Regenerative Braking: SRMs can be easily configured for regenerative braking, allowing for energy recovery during deceleration, thereby improving overall system efficiency.
- Cost-Effectiveness: SRMs are often more cost-effective compared to other motor types, especially in high-speed and high-power applications, due to their simpler construction and lower manufacturing costs.
VIII. APPLICATION
- Electric Vehicles (EVs)
- Industrial Automation
- HVAC Systems (heating, ventilation, and air conditioning (HVAC) systems )
- Home Appliances
- Renewable Energy
- Pumps and Compressors
- Aerospace and Marine
Conclusion
This project has presented a simple method for designing SRM operating under sensor less condition. This SRM design method takes into account the practical machine constraints very easily and can be simply implemented as an enhancement to existing design methods. The utilization of Switched Reluctance Motors in sensorless control systems offers numerous benefits across a wide range of applications. By eliminating the need for position or speed sensors, sensorless control systems simplify motor control, reduce system complexity, and lower overall costs.
References
[1] Arthue V. Radum, Caio A. Ferreira, Eike Richter, 1998 Two Channel Switched Reluctance Starter/generator Results( IEEE Trans. on Ind. Applicat) pp 34(5) 1026-1034. [2] G. L. Fronista, G. Bradbury. 1997 An electromechanical actuator for a transport aircraft spoiler surface, (Proceedings of the 32nd Intersociety Energy Conversion Engineering Conference Honolulu, HI, USA) pp 694-698. [3] C. Cossar, L. Kelly, T. J. E. Miller, et al. 1999 The design of a switched reluctance drive for aircraft flight control surface actuation. (IEE Colloquium on Electrical Machines and Systems for the More Electric Aircraft, London) pp 1-8. [4] A. Schramm, D. Gerling. 2006 Researches on the Suitability of Switched Reluctance Machines and Permanent Magnet Machines for Specific Aerospace Applications Demanding Faul Tolerance. (International Symposium on Power Electronics, Electrical Drives, Automation and Motion Taormina) pp 7-11. [5] Drive An Application for Switched Reluctance Machines. (IEEE 58th Vehicular Technology Conference) pp 3226-3230. C. S. Edrington, B. Fahimi. Coolant Pump 2003 [6] S. Aida, A. Komatsuzaki, I. Miki. 2008 Basic characteristics of electric vehicle using 40kW switched reluctance motor. (International Conference on Electrical Machines and Systems) pp 3358-3361. [6] [7] D.Cheok and Z.F.Wang. 2005 Fuzzy logic rotor position estimation based switched reluctance motor DSP drive with accuracy enhancement. (IEEE Trans. Power Electron) pp 20(4): 908-921. [7] A [8] H.Gao, F.R.Salmasi, and M.Ehsani. 2000 Sensorless control of SRM at standstill.(In Proc. IEEE APEC) pp 850-856. [9] Shao Weijian, Zhong Rui, Guo Xiaoqiang, et al. 2017 Analysis of the null current gradient position for sensorless control of SRM (IECON 2017-43rd Annual Conference of the IEEE, Beijing),pp 1816-1821. [10] Gan Chun,Wu Jianhua, Hu Yihua, 2016 Online Sensorless Position Estimation for Switched Reluctance Motors Using One Current Sensor(IEEE Transaction on Power Electronics) pp.31(10): 7248-7263.
Copyright
Copyright © 2024 Mr. Manish Dhawale, K. M. Dhenge , Khushi Khetade, Samiksha Khairkar, Sippy Gajbhiye. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59297
Publish Date : 2024-03-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online