

Ijraset Journal For Research in Applied Science and Engineering Technology
Pipe Inspection Robot
Authors: Krunal More, Sujal Ingale, Glen Joe Dixon, Atharva Tamore, Pranit Mehata
DOI Link: https://doi.org/10.22214/ijraset.2024.59752
Certificate: View Certificate
Abstract
A pipe inspection robot is device that is inserted into pipes to check for obstruction or damage. These robots are traditionally manufactured offshore, are extremely expensive, and are often not adequately supported in the event or malfunction. This had resulted in associated environmental services limited. A New Zealand utilize of this equipment, facing significant periods of down time as they wait for their robots to be the repaired. Recently, they were informing that several robots were no longer supported. This project was conceived to redesign the electronics control systems one of these PIR, utilizing the existing mechanical platform. Requirements for the robot were that it must operate reliably in confined, dark and wet environments and provides a human wear with a digital video feed of the internal status of the pipes. There robot should as much as possible incorporate off the shaft components, cheap, and potentially onsite repair. This project details the redesign and constructions of such robots. Its employees their electronic boards integrated with mechanical components and provides video feedback via custom graphical interface although at the prototypes state the electronics has been successful with cost of less than a length of the original robot purchase prize.
Introduction
I. INTRODUCTION
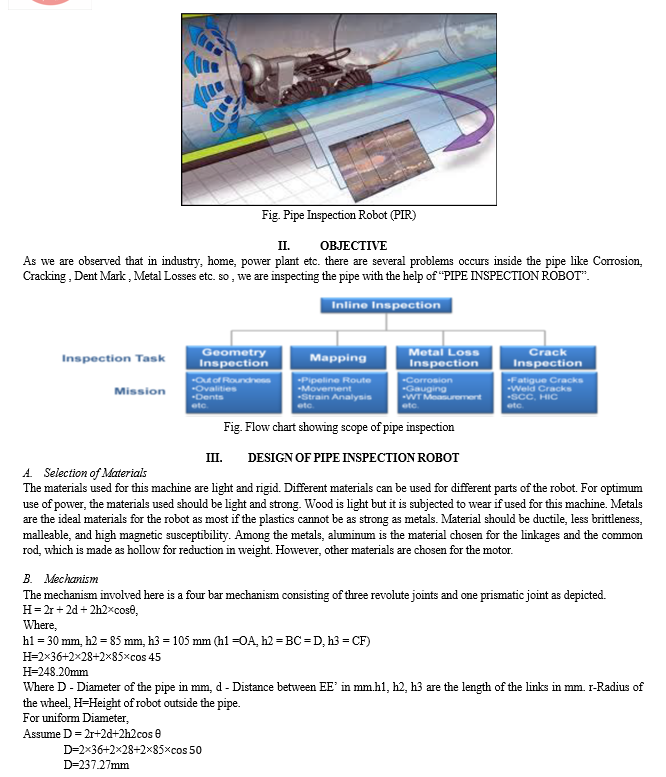
Pipeline systems deteriorate progressively over time. Corrosion accelerates progressively and long-term deterioration increases the probability of failure (fatigue cracking). Limiting regular inspecting activities to the "scrap" part of the pipelines only, results ultimately into a pipeline system with questionable integrity. The confidence level in integrity will drop below acceptance levels. Inspection of presently uninspected sections of the pipeline system becomes a must. This project provides information on the "robotic inspection technology". Pipelines are proven to be the safest way to transport and distribute Gases and Liquids. Regular inspection is required to maintain that reputation. The larger part of the pipelines system is accessible by In-Line Inspection Tools but this access is limited to the section in between the launching and receiving traps only. Unfortunately, corrosion does not have this limitation. The industry looks for means of inspecting these in-accessible pressure holding piping systems, preferably, without interrupting the operations. It is a fact that sufficiently reliable and accurate inspection results can only be obtained by direct pipe wall contact/access. If that is not feasible from the outside, we have to go inside. Since modifying pipeline systems for In-Line Inspection is mainly not practical, PIPE INSPECTION ROBOT pursues development of ROBOTIC inspection services for presently in-accessible pipeline systems. Robotics is one of the fastest growing engineering fields of today. Robots are designed to remove the human factor from labor intensive or dangerous work and also to act in inaccessible environment. The use of robots is more common today than ever before and it is no longer exclusively used by the heavy production industries. The inspection of pipes may be relevant for improving security and efficiency in industrial plants. These specific operations as inspection, maintenance, cleaning etc. are expensive, thus the application of the robots appears to be one of the most attractive solutions. Pipelines which are tools for transporting oils, gases and other fluids such as chemicals, have been employed as major utilities in a number of countries for long time. Recently, many troubles occur in pipelines, and most of them are caused by aging, corrosion, cracks, and mechanical damages from the third parties. So, continuous activities for inspection, maintenance and repair are strongly demanded. The robots with a flexible (adaptable) structure may boast adaptability to the environment, especially to the pipe diameter, with enhanced dexterity, manoeuvrability, capability to operate under hostile conditions. The wheeled robots are the simplest, most energy efficient, and have advantages in manoeuvrability with the ability to adapt to in-pipe unevenness, move vertically in pipes, and stay stable without slipping in pipes. These types of robots also have the advantage of easier miniaturization. The key problem in their design and implementation consists in combining the capacity of self-moving with that of self-sustaining and the property of low weight and dimension. A very important design objective is represented by the adaptability of the in-pipe robots to the inner diameters of the pipes. Currently, the applications of robots for the maintenance of the pipeline utilities are considered as one of the most attractive solutions available Pipe Inspection Robot is shown in Figure 1.1


VI. ADVANTAGES AND DISADVANTAGES OF PIRA. Advantages
- The pipe inspection robot inspects situation inside the pipe which will be recorded and displayed on the monitor screen, it also facilitates working personnel for effective observation, detection, quick analysis and diagnosis.
- Save comprehensive investment, improve work efficiency, more accurate detection.
- Reduce the frequency of entering into the testing environment.
- Operating cost related to other method is low.
- Cost of manufacturing of this robot is relatively low.
B. Disadvantages
- Pipe inspection robots have such limitations as their ability to turn in a T-shaped pipe or move in a plug valve.
- Another drawback of earlier robots is that the friction between the pipe and the cables for communication and power supply makes it difficult to move a long distance. A fiber optic communication system can reduce the friction.
- This robot does not work in water.
- This robot works only in empty pipe.
Conclusion
Robots play an important role in inside pipe-network maintenance and their repairing. Some of them were designed to realize specific tasks for pipes with constant diameters, and other may adapt the structure function of the variation of the inspected pipe. In this project inside pipe modular robotic system are proposed. An important design goal of these robotic systems is the adaptability to the inner diameters of the pipes. The given prototype permits the usage of a mini-cam for visualization of the in-pipe inspection or other devices needed for failure detection that appear in the inner part of pipes (measuring systems with laser, sensors etc). The major advantage is that it could be used in case of pipe diameter variation with the simple mechanism. We developed a pipe inspection robot that can be applied to 203mm- 254mm pipeline. A real prototype was developed to test the feasibility of this robot for inspection of in-house pipelines. The types of inspection tasks are very different. A modular design was considered for easily adapted to new environments with small changes. Presence of obstacles within the pipelines is a difficult issue. In the proposed mechanism the problem is solved by a spring actuation and increasing the flexibility of the mechanism. The robot is designed to be able to traverse horizontal and vertical pipes. Several types of modules for pipe inspection mini robot have been presented. Many of the design goals of the Pipe inspection robot have been completely fulfilled.
References
[1] Theory of Machine -Prof. R. S. Khurmi & Prof. J. K. Gupta. [2] Automation production systems, and Computer-Integrated Manufacturing - Prof. M. P. Groover [3] http://www.ulcrobotics.com/products [4] Introduction to Pipe Inspection and Cleaning Robot [5] http://www.sciencedirect.com/science/article/pii/S0094114X06002254 [6] http://capitalpipeliners.com/cctv-pipe-inspection-method-applicability [7] http://www.google.co.in/patents?hl=en&lr=&vid=USPAT5084764&id=tislAAAAEBAJ&oi=fnd&dq=+of+pipe+inspection&printsec=abstract#v=onepage&q=of%20pipe%20inspection&f=false [8] http://ieeexplore.ieee.org/xpl/mostRecentIssue.jsp?punumber=3951 [9] http://www.faadooengineers.com/tube/2012/06/11/mechanical-engineering-project-pipe-inspection-robot/ [10] En.wikipedia.org/wiki/Pipeline_vedio_inspection
Copyright
Copyright © 2024 Krunal More, Sujal Ingale, Glen Joe Dixon, Atharva Tamore, Pranit Mehata. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59752
Publish Date : 2024-04-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online