

Ijraset Journal For Research in Applied Science and Engineering Technology
Fire Fighting Robot
Authors: Shreyansh Mishra, Amar Shete, Shravyasri , Sanket Shinde, Prof. Vrinda Parakhi
DOI Link: https://doi.org/10.22214/ijraset.2023.56997
Certificate: View Certificate
Abstract
Fire safety is the major priority in this time of rapid industrialization. As in many factories, mainly the chemical industries and also in clothe, electrical factories, many fire accidents happen. According to the global report about 10000 deaths happen on average every year because of the fire accidents in the world. Since we are using many technologies to avoid these accidents, we also need to focus on post-accidents technologies. As many countries and factories use such technologies, it has been seen that the death rate because of fire accidents has decreased by some percent in past years. Means this works and we are working in the right direction. So, keeping the same in mind we came with a project that is a fire-fighting robot – an autonomous vehicle and robot. It is based on sensor-based object detection. This model is practically a working model and able to detect the fire of its own. Also, this vehicle is self-driven while checking the safety issues.
Introduction
I. INTRODUCTION
Fires are one of the most devastating and life-threatening disasters that can occur in various environments, including buildings, industrial facilities, and natural landscapes. Traditional firefighting methods, although effective, often pose significant risks to the lives of firefighters and are limited by human capabilities and physical constraints. To address these challenges and enhance the efficiency and safety of fire suppression operations, the field of robotics has emerged as a promising avenue for research and development. Fire-fighting robots are autonomous machines designed to navigate hazardous environments, detect fires, and extinguish flames with minimal human intervention.
These robots combine advanced technologies such as artificial intelligence, computer vision, and robotics to provide effective and efficient fire response capabilities. By leveraging these cutting-edge technologies, firefighting robots have the potential to revolutionize the way we approach fire emergencies.
This paper will provide an in-depth analysis of the key components and technologies involved in the development of a firefighting robot. It will explore the sensor systems utilized for fire detection, the navigation algorithms employed for autonomous movement, and the firefighting mechanisms implemented for effective flame suppression. Furthermore, the paper will discuss the challenges and limitations associated with the deployment of firefighting robots and propose potential areas for future research and improvement.
II. LITERATURE SURVEY
- Fire-fighting is the act of extinguishing fires i.e. it sprinkles water on to the fire. Monitors the areas where natural calamities and bomb explosions occur. Robot detects temperature at the site where the robot exists. This robot is helpful in those areas where natural calamities and bomb explosions will occur. If fire is detected with the help of sensors or manually operates the water pump mechanism through a relay circuit.
- The Robot when detects fire, it moves on its own. Arduino will control the motor through the motor driver circuit. To rotate to either right or left direction, one motor will remain off and other one will move, thus resulting in rotation of the body. If Arduino flame sensor will detect the fire then the robot will move forward to the fire slowly. Here, algorithm is written such that it makes a slow approach of the robot towards fire. As soon as it detects fire, robot needs to stop at a certain limit and should not run over the fire. The LM35 sensor used here senses the heat. If it sensor output is greater than threshold value, it stops and moves back slightly to accommodate extinguishing.
- The project is being implemented by using an android application and web server. The water container is placed on the robot when the fire is detected, it sprays the water on the fire and extinguishes it. The robot accurately and efficiently finds the fire and within minimum time after the fire is detected it is extinguish.
- This study developed a fire inspection robot with two parts: autonomous inspection, and automatic fire extinguishing. The hardware for the autonomous inspection system primarily consists of a motion unit and sensor unit. In contrast, the hardware of the automatic fire-extinguishing system primarily consists of a video monitoring system and a fire extinguishing system.
- The fire-fighting robot developed is a remotely controlled robot with two independent built-in fire extinguishing cylinders, built-in flame detection sensors and 3 mounted IR camera units. The exterior of the robot is Ag-coated, and it is operable under high temperatures (approximately 700º C). The interior features a mounted insulation board, designed to protect the interior from external heat. The crawler system steel chain is applied to move within fire scenes, and designed to climb stairs for the rescue work within buildings.
- This project is about a real-time firefighting robot that moves at a steady pace, detects a fire, and then uses a pumping mechanism to put it out. The smoke sensor, gear motor and its driver, relay driver, and other components were all interfaced to the Arduino for detection and extinguishment. The robot communicates with a smartphone through Bluetooth and uses the analogue and digital data from the sensors to detect whether or not there is a fire in the vicinity.
- As per the sketch of design and enforcement of a firefighting device that moves towards the fire and pumps out gas to extinguish the fire is presented in this project. The project explained how to interface ARM7 with different components. The system may be useful for accompanying fire fighters and preventing an outbreak. This is one of the ample opportunity to automation. It will be used in the location or sites where it is impossible to reach or dangerous for humans.
- This paper has presented a unique vision of the concepts which are used in this particular field. It aims to promote technology innovation to achieve a reliable and efficient outcome from the various instruments. Experimental work has been carried out carefully. The result shows that higher efficiency is indeed achieved using the embedded system. With a common digitalized platform, these latest instruments will enable increased flexibility in control, operation, and expansion; allow for embedded intelligence, essentially foster the resilience of the instruments; and eventually benefit the customers with improved services, reliability and increased convenience
- Overall, a fire-fighting robot that can be controlled from some distance has been successfully developed. It has advantageous features such as ability to detect location of fire automatically besides having a compact body and lightweight structure. QRob also has the ability to avoid hitting any obstacle or surrounding objects due to its provision of an ultrasonic sensor. The QRob robot can be used at a place that has a small entrance or in small spaces because it has a compact structure. The operator is able to extinguish fire using remote control from longer distance. Operators can also monitor the environmental conditions during the process of firefighting by using the camera that is connected to the smartphone.
- This model of Fire Extinguishing Robot aids to share out the burden of fire fighters in firefighting task. Our project aims to build a real time firefighting robot which moves in a constant speed, identify the fire and then extinguish it with the help of pumping mechanism. The detection and extinguishing was done with the help basic hardware components attached with the robot. Firstly, IR Flame sensors are used for the detection of fire. Secondly, BO Motors and Rubber wheels are used to navigate the robot to reach the fireplace.
III. METHODOLOGY/EXPERIMENTAL
Extinguish the fire is one of the important jobs but it is very risky occupation. It is very harmful for human beings. Due to that, in modern time the humans are replaced by the robots, the robot automatically finds the fire then robot will go to that place and extinguish fire easily. Because of the automation the risk to victim is decreased. In our firefighting robot flames sensors play an important role.

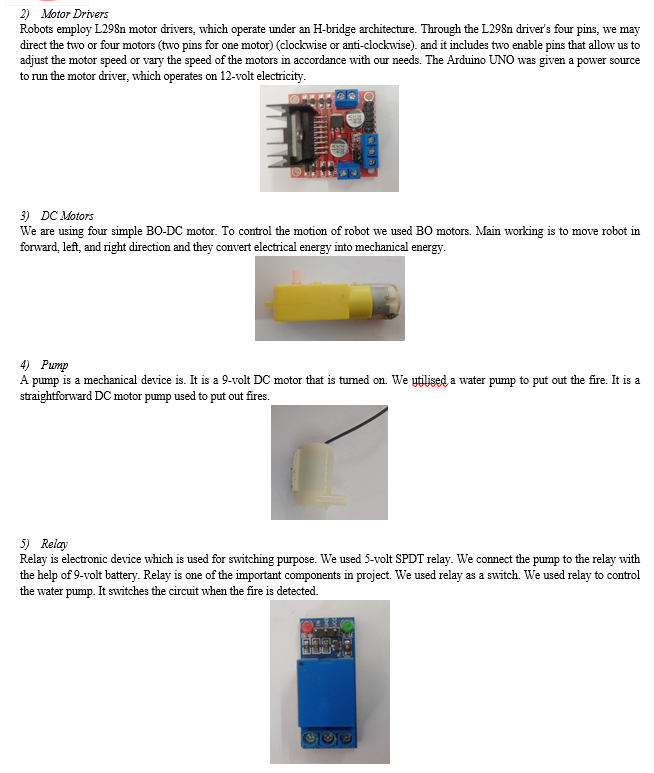
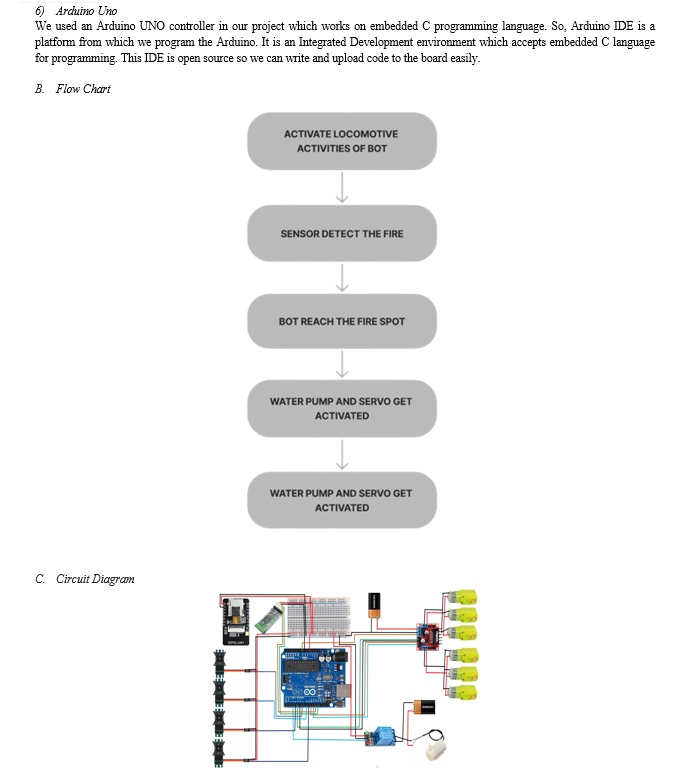
The Arduino UNO, which is the core component of the robot and is depicted in the circuit diagram, is crucial for controlling all other components. To detect the flames, we employ three flame sensors, each of which is located on a separate side and so covers a 180-degree region. Flame sensors contain three pins (VCC, ground, and DO), and since they operate on a 5-volt DC source, VCC is linked to the Arduino UNO 5-volt pin, GND to the ground pin, and the DO pins to the I/O pins. The bot's mobility is controlled by four BO motors. The motor driver is linked to the BO motors. The motor controls the speed, ON/OFF, and direction of all BO motors. The speed, directions(left, right and forward) and ON/OFF of each BO motor is control by the motor driver. Since the motor driver requires a 12-volt DC supply, we connected a 12-volt battery to it. All six of the pins on the motor driver, which are linked to the I/O pins of the Arduino UNO, are used to control the speed and direction of the motors, respectively. Since the Arduino UNO runs on a 5-volt DC supply, we link its vin pin to the motor driver's 5-volt output pin to provide power. There is a DC water pump to put out the fire, and it requires a power source of between 5 and 12 volts, so we connected one terminal to the 9-volt DC supply and the other to the relay. Basically, we utilized relays in this situation to switch the pump. The relay is attached to the battery's last terminal. The Arduino UNO is connected to the relay's three pins (VCC, ground, and l/O). To disseminate the water and cover a vast region, we utilized one servo motor. We link an Arduino to a servo motor.
D. Algorithm
Include library for servo motor servo.h.
We initialize the servo motor as servo.
We initialize the initial position of servo motor as integer variable as pos and set its value at zero as pos=0.
Define one Boolean expression for detecting the fire as fire and set fire = false.
Declaring three integer variables x,y,z for three sensors.
We define the pins of three flame sensors as left=9 , right = 10 and forward = 11.
Define the pins and enable pins of motors as LM1=2, LM1=3, RM1=7, RM2=8, enb=5 and enb =6
Initialize the pump pin as pump=12.
In setup () function we declare the pin modes for all sensors and motors pins as input or output, define three flame sensors as an INPUT and motors pins as an OUTPUT.
We define the servo motor pin as 4 and declare its position at 90 degrees.
Create one function as put_off_fire () for star the pump and servo motor.
In function put_off_fire () first we set pump as HIGH and give delay of 50 microseconds
Used for loop for servo motor and declare its position from 50 to 130 degree and incrementing the value of position by 1.
In for loop, we assign the position to the servo motor and give 10 microseconds delay.
Use another for loop for revers the servo motor by decrementing the value of position.
Then set pump pin as LOW.
Set servo position at 90 degrees.
And use Boolean condition as fire=false.
In the void loop () first assign the values of three sensors to the integer x, y, z as x=left, y=right and z=forward.
Initialize the servo position at 90 degrees.
Use if-else condition for moving the robot forward, left and right.
In if condition write logic for moving the bot forward as left==LOW and right== LOW and Forward ==LOW OR left==HIGH and right== HIGH and Forward ==LOW then move the robot forward direction by setting the pins of motor LM1=RM1= HIGH and LM2=RM2= LOW and set the speed of motor as ena=enb=140.
Give the one second delay and set fire= true to start the pump and servo motor.
In else-if condition write logic for moving the bot right as left==HIGH and right== LOW and Forward ==LOW OR left==HIGH and right== LOW and Forward ==LOW then move the robot in right direction by setting the pins of motor LM2=RM1= HIGH and LM1=RM2= LOW and set the speed of motor as ena=enb=140.
Give the one second delay and set fire= true to start the pump and servo motor.
In else-if condition write logic for moving the bot left direction as left==LOW and Right== HIGH and Forward ==LOW OR left==LOW and Right== HIGH and Forward ==HIGH then move the robot in left direction by setting the pins of motor LM1=RM2= HIGH and LM2=RM1= LOW and set the speed of motor as ena=enb=140.
Give the one second delay and set fire= true to start the pump and servo motor.
In else condition write logic for stop the bot by setting the pins of motor LM2=RM1= LM1=RM2= LOW and set the speed of motor as ena=enb=0.
Give the 10-microsecond delay and set fire= false to off the pump and servo motor.
Use while loop for start the put_of_fire () function by setting fire– true.
IV. RESULTS AND DISCUSSIONS
The real model for our project is shown in Figure 8. The robot is moved by four BO-DC motors with a 150 RPM speed. Model dimensions are approximately 18 cm in length, 15 cm in breadth, and 1.5 KG in weight. According to the diagram below, every component is installed on the board. We link the water pump pipe to the servo motor so that the robot may move easily on a level surface and sprinkle water in the x-axis while also being able to do so in a 180-degree region. We employ three flame sensors that have a 180-degree field of detection

V. FUTURE SCOPE
The future scope of fire-fighting robot projects involves further advancements in artificial intelligence (AI) and machine learning (ML) techniques. By harnessing AI and ML algorithms, robots can continuously learn from past firefighting experiences, adapt their strategies to new scenarios, and optimize their performance in real-time. This could include developing more sophisticated decision-making algorithms, predictive analytics for fire behavior, and intelligent path planning algorithms. Multiple firefighting robots could collaborate and coordinate their efforts to combat large-scale fires. Research could explore swarm robotics techniques, where a team of robots communicates and collaborates to distribute tasks effectively, share information, and work collectively to suppress fires more efficiently. This approach would allow for better coverage, faster response times, and improved situational awareness.
VI. ACKNOWLEDGMENT
I would firstly like to thank our project guide Prof. Vrinda Parakhi. I appreciate her useful information to complete the project. I would like to thank teachers of Vishwakarma Institute of Technology. I am grateful to my family for their unwavering support throughout my life. Most importantly, I would like to thank the authors of the research papers and developers to whom I have referred throughout the project. These references greatly aided me in completing this paper.
Conclusion
In conclusion, the development of fire-fighting robots represents a significant advancement in the field of firefighting and emergency response. These autonomous machines offer the potential to revolutionize fire suppression operations by providing enhanced efficiency, safety, and effectiveness. The research and development efforts discussed in this paper have highlighted the key components and technologies involved in the design of fire-fighting robots. These include advanced sensor systems for fire detection, intelligent navigation algorithms for autonomous movement, and multifunctional firefighting mechanisms for flame suppression. By integrating these technologies, fire-fighting robots can autonomously navigate through hazardous environments, detect fires with precision, and effectively extinguish flames, reducing the risks faced by human firefighters. By leveraging advanced technologies and continuous research, we can enhance the efficiency, effectiveness, and safety of fire suppression operations, ultimately saving lives, protecting property, and minimizing the devastating impact of fires on society. Continued research and collaboration in this field will contribute to the ongoing improvement and development of fire-fighting robots, leading us towards a safer and more resilient future.
References
[1] Automatic Surveillance and Fire Fighting Robot Using IOT Dr. S.Ponlatha1 , R.Praveenraj2 , P.Santhosh Kumar3 , S.Saran4 , A.Saravanan5 1Associate Professor, Department of ECE, Mahendra Engineering College (Autonomous) 2,3,4,5Department of ECE, Mahendra Engineering College (Autonomous) [2] Review Paper on Arduino Based Autonomous Fire Fighting Robot Mrs. Wrushali Deshmukh1 , Akash Verma2 , Omkar Kandalkar3 , Ayush Kale4 , Avishkar Pol5 Lecturer, Department of Electronics & Telecommunication1 Students, Department of Electronics & Telecommunication2,3,4,5 Bharti Vidyapeeth Institute of Technology, Navi Mumbai, India [3] Fire Fighting Robot 1Sukanya Prashant Karpatil, 2Apeksha Rajendra Patil, 3Deepak Dinesh Sharma, 4Mrs.Farheen Talib 1,2,3Students, 4Professor Information Technology Department Pillai HOC College of engineering Raigad, Maharashtra [4] An Indoor Autonomous Inspection and Firefighting Robot Based on SLAM and Flame Image Recognition Sen Li 1 , Junying Yun 1 , Chunyong Feng 2 , Yijin Gao 1 , Jialuo Yang 1 , Guangchao Sun 1 and Dan Zhang 1,* 1 The School of Building Environment Engineering, Zhengzhou University of Light Industry, Zhengzhou 450001, China 2 The School of Mechanical and Electrical Engineering, Xi’an University of Architecture and Technology, Xi’an 710055, China * Correspondence: zhangdan@zzuli.edu.cn [5] World Conference on Technology, Innovation and Entrepreneurship New Concept for Indoor Fire Fighting Robot AlHaza Ta*, Alsadoon Aa , Alhusinan Za , Jarwali Ma , Alsaif Kb a Kacst , robotics and intelligent systems center b King saud university / Kacst, robotics and intelligent systems center Hanol Inc. [6] FIRE FIGHTING ROBOTIC VEHICLE USING ARDUINO Aftab Nagarji*1, Aniket Vani*2, Pratik Kumathe *3, Prof. N.S.Nadaf* 4 * 1,2,3Student, Department Of Electronics And Telecommunication Engineering, Dr. Magdum College Of Engineering, Jaysingpur. India. * 4Associate Professor, Department Of Electronics And Telecommunication Engineering , Dr. J. J Magdum College Of Engineering, Jaysingpur, India [7] Fire Fighting Robot S. Kavitha 1 , Krishnarajendra sagar 2 , Mohamed Tousif 3 , Nishanth C.R 4 , Likith. V 5 1Professor, Department of Electronics and Communication Motorering, Atria Institute of Technology, Bangalore, India 2,3,4,5Student, Department of Electronics and Communication Motorering, Atria Institute of Technology, Bangalore, India [8] FIRE FIGHTING ROBOT Sahil S.Shah1 , Vaibhav K.Shah2 , Prithvish Mamtora3 and Mohit Hapani4 1,2,3,4D.J.Sanghvi College of Engineering, Vile Parle – West, Mumbai, India [9] Development of Fire Fighting Robot (QRob) Mohd Aliff1 , MI Yusof3 Malaysian Institute of Industrial Technology Universiti Kuala Lumpur Johor, Malaysia Nor Samsiah Sani2 Center for Artificial Intelligence Technology (CAIT) Universiti Kebangsaan Malaysia Selangor, Malaysia Azavitra Zainal4 Malaysian Institute of Industrial Technology Universiti Kuala Lumpur Johor, Malaysia [10] Review Paper on Arduino Based Fire Fighting Robot Authors: Anam Sheikh, Gopal Purohit, Vaishnavi. C. Raut, Rehan Rashid Abdul, Prof. C. H. Kidile
Copyright
Copyright © 2023 Shreyansh Mishra, Amar Shete, Shravyasri , Sanket Shinde, Prof. Vrinda Parakhi. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56997
Publish Date : 2023-11-24
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online