

Ijraset Journal For Research in Applied Science and Engineering Technology
Robot Vehicle with ESP32 CAM
Authors: B. Ashwin Kumar
DOI Link: https://doi.org/10.22214/ijraset.2024.64054
Certificate: View Certificate
Abstract
A surveillance robot equipped with ESP32-CAM is a setup that assembles a portable surveillance gadget from a robot frame and the ESP32-CAM board. The ESP32-CAM board is an affordable development platform featuring an integrated camera and Wi-Fi capabilities. This robot is capable of navigating and capturing video footage across various settings due to its frame. The gadget can be operated through a web-based interface on the ESP32-CAM board. Through this interface, users can direct the robot\'s movements, view real-time video feeds, and capture video snapshots. Moreover, the system can be configured to alert the user whenever it detects movement through computer vision methods such as tracking and identifying objects. This ESP32-CAM surveillance robot finds applications in home security, monitoring from afar, and industrial surveillance. Its low cost and user-friendly interface make it an attractive choice for those looking to remotely oversee their surroundings.
Introduction
I. INTRODUCTION
The creation of surveillance robots has seen a surge in interest due to their wide-ranging uses in areas like industrial oversight, domestic automation, and protection, among others. The ESP32-CAM project is focused on developing a surveillance robot that is both cost-effective and efficient, both for indoor and outdoor use. Surveillance robots have become increasingly prevalent in recent times, thanks to their capability to monitor and gather information from afar. The ESP32 CAM module, with its Bluetooth and Wi-Fi capabilities, allows for remote operation of surveillance robots. This module, a compact camera designed for easy integration into a robot, is operated by the ESP32 microcontroller and produces high-resolution photos. It also features Bluetooth and Wi-Fi, making it simple to communicate with a computer or a remote control device. The ESP32 CAM module can be utilized to create a surveillance robot capable of being controlled from a computer or smartphone. This robot can be set to explore a specific area, capturing images or videos of its environment. These captured images and videos can be wirelessly sent to a remote control station, allowing for real-time viewing and analysis. Its ability to wirelessly transmit data, operate remotely, and capture detailed images and videos makes the ESP32 CAM module an essential component for surveillance robots. It is also user-friendly, making it straightforward to incorporate into a robot without the need for extra equipment. In conclusion, the ESP32 CAM module is a valuable tool for building surveillance robots that serve various purposes, including security, surveillance, and inspection.
An embedded system combines hardware, software, and additional components with networked computer pieces. A personal computer's goal is multitasking, not the execution of a single task. In many cases, a bigger system will include an embedded system. The idea that a general-purpose computer is really made up of several embedded systems might be difficult to grasp. A well-designed embedded system may be able to hide its CPU and software from the user.
II. BLOCK DIAGRAM
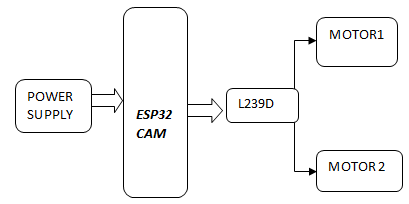
FIG.1. BLOCK DIAGRAM
The above block diagram shows the power flow from the power supply the designing blocks for power supply is shown below and esp32 microcontroller is used for controlling and entire working and the signals are given to drive the motors

FIG.2.Power Supply
The power supply is created with a stepdown transformer. This transformer reduces the voltage, as the project needs a lower voltage than the power supply's standard voltage. Electronic devices operate on direct current (dc), so we employ a diode-based full bridge rectifier and a filter to ensure the output is pure dc, free from any alternating current (ac) ripple. Additionally, a regulator is used to achieve the desired operating voltage of the circuit.
III. DESIGN METHODOLOGY
A. ESP32 Cam
The ESP32-CAM development board is composed of various parts such as an OV2640 camera, an ESP32-S CPU, a slot for a microSD card, and standard-purpose input/output (GPIO) connections. This guide will demonstrate the process of using the GPIOs on the ESP32-CAM board.
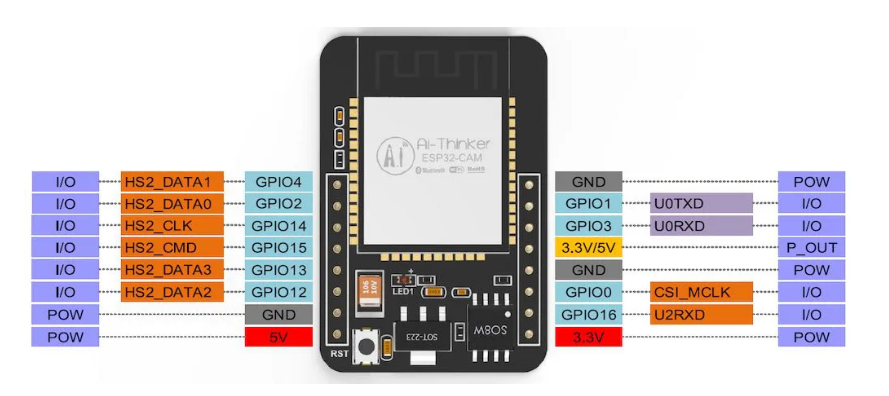
FIG.3. ESP32 CAM
The ESP32-CAM has three black GND pins and two red pins for 3.3V and 5V power. It can be powered through either pin, but it's usually recommended to use the 5V pin. The pin with the silkscreen label, VCC, should not be energized through it. The VCC pin is surrounded by two terminals and indicates two voltage levels. To achieve a 5V output, the terminals need to be connected to the VCC pins. The ESP32 CAM WiFi Module Bluetooth with OV2640 2MP For Face Recognition is a little camera module. It is used by a multitude of IoT applications. The use of a DIP package allows for the direct placement of this module into the backplane. It incorporates two powerful 32-bit LX6 CPUs, WiFi, regular Bluetooth, and BLE Beacon. It has temperature, Hall, and on-chip sensors.
B. Power Supply
The regulated power source supplies the necessary current for the circuit to operate. Following its journey through the transformer, the rectifier lowers the 230V input voltage from the utility grid to 12V a.c. This process creates a pulsed direct current (DC) voltage. The rectifier's output voltage is refined to remove any residual a.c. elements, yielding a clean direct current voltage. Subsequently, a voltage regulator is employed to convert this voltage into a clean, constant direct current.
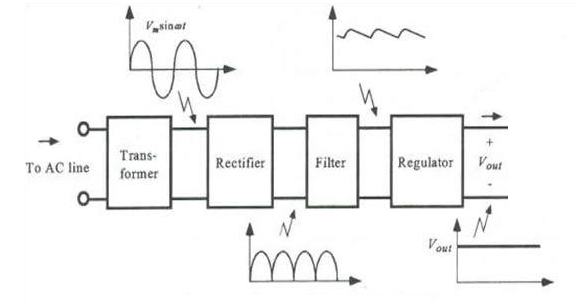
FIG.4.Block Diagram of Power supply
A stepdown transformer is used to reduce the voltage to an appropriate level. The output of the transformer is sent to the rectifier. Rectifiers have several useful applications, but one of the most common is in DC power supply and systems that transfer high-voltage DC power. A capacitive filter is used in the project to reduce ripple and provide a virtually constant DC voltage to the load. The term "voltage regulator" describes an electrical regulator that can keep the voltage level constant on its own.
C. DC Motor
DC motors are commonly used in robotics as the primary actuators. They convert electrical energy into mechanical rotational energy. While they can be directly connected to wheels, they often work in conjunction with gearboxes (gear motors) to optimize torque and speed for specific applications. A DC motor essentially consists of a stator and a rotor.
Stator: This stationary part houses the magnetic field, which can be generated by electromagnets or permanent magnets.
Rotor: The rotating part, also known as the armature, carries the current-carrying conductors.
When current flows through these conductors, it interacts with the stator's magnetic field, producing a torque that drives the rotor. To ensure continuous rotation, DC motors employ a commutator. This is a segmented copper cylinder attached to the rotor shaft. Carbon brushes make contact with the commutator segments, providing a path for current to flow into and out of the rotor windings. As the rotor turns, the commutator switches the current direction in the windings, maintaining the torque in the same direction and preventing the motor from stalling. A motor driver is an electronic circuit that controls the speed and direction of a DC motor. It acts as an interface between the microcontroller or other control system and the motor, providing the necessary power and signals.
D. Aurdino Software
Once the Arduino IDE is installed on your PC, connect the board to it using a USB cable. To access the Arduino IDE, navigate to the Tools menu, then select Boards > Arduino/Genuino Uno from the main menu. Choose the appropriate port using the Tools > Port option. The Wiring-based Arduino programming language is the tool you'll use to program an Arduino Uno. Simply visit the Files > Examples > Basics section and open the example code. To initiate flashing the built-in LED and start using the Arduino Uno board, simply blink. Click the "upload" button located at the top of your integrated development environment (IDE) to submit the sample code you've loaded. The Arduino's built-in LED will flash to signal that the upload has been completed. A sample code flashing can be observed.
IV. RESULTS
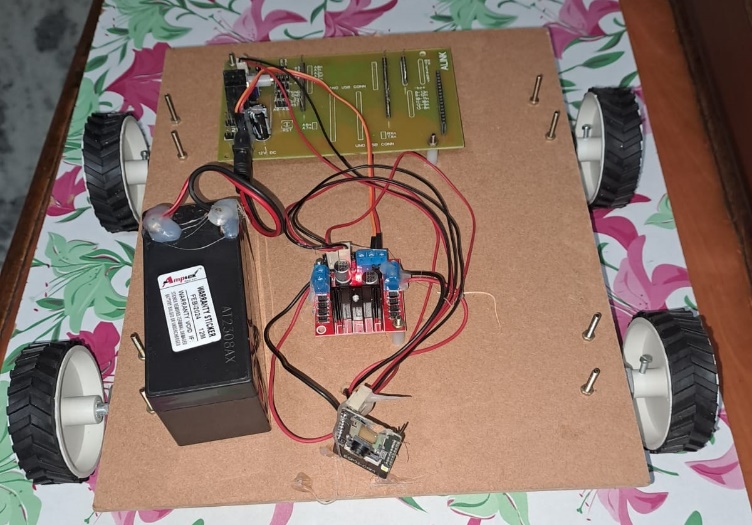
FIG.5. Prototype Model
The ESP32-CAM-based robot is a versatile device designed to navigate and capture video in a wide range of environments, rendering it an invaluable asset for surveillance, monitoring, and exploration purposes. Equipped with an ESP32-CAM board, this robot seamlessly integrates a camera module and Wi-Fi connectivity, enabling it to stream live video feeds that can be viewed remotely. The robot's movement and video capabilities are effortlessly controlled via a web interface, accessible from any device connected to the internet.
Users can control the robot through their smartphones or laptops by connecting to the ESP32-CAM's network. The control interface, accessible via a web browser, provides features such as live video streaming, motion control, and the ability to capture screenshots of the video feed. The "Network Scanner App" for smartphones and the "Advanced IP Scanner" for laptops simplify the process of discovering and connecting to the ESP32-CAM's IP address, ensuring a user-friendly setup experience.
In practical applications, this system enables users to remotely monitor environments in real-time, control the robot's movements to explore various areas, and capture images for later review. This feature renders the ESP32-CAM-based robot especially valuable in situations where human presence is either impractical or unsafe, such as in hazardous areas, confined spaces, or for wildlife monitoring. The simplicity of control through a web interface further enhances its accessibility, making it ideal for both technical and non-technical users. Overall, the ESP32-CAM robot stands as a cost-effective and versatile solution for a broad spectrum of remote monitoring and control applications.
Conclusion
In conclusion, this paper introduces an innovative development in the field of remote monitoring and surveillance: the ESP32-CAM surveillance robot. This system represents a significant advancement in accessible and cost-effective surveillance technology, with a wide array of potential applications, particularly in securing residential and commercial spaces. The ESP32-CAM module, known for its compact size and affordability, offers seamless video capture and image-taking capabilities. When integrated onto a mobile robotic platform, it enables users to remotely control and monitor the robot in real-time, providing a practical solution for areas where direct human supervision is challenging or undesirable.As the demand for efficient and remote surveillance solutions continues to grow, this study presents a promising approach that could address various security and monitoring challenges. The ESP32-CAM surveillance robot not only offers a robust and adaptable tool for maintaining constant vigilance but also underscores the potential for developing more sophisticated, yet affordable, surveillance systems. This research contributes to the field by demonstrating how emerging technologies can be leveraged to create effective, user-friendly, and low-cost solutions for remote monitoring needs.
References
[1] Prof. Congduc Pham, “A Low-Cost LoRa Gateway with QoS Features”, http://www.univpau.fr/~cpham, Université de Pau, France, May 2016. [2] Semtech Corporation, “SX1272/73 - 860 MHz to 1020 MHz Low Power Long Range Transceiver”, www.semtech.com, March 2015. [3] LoRa Alliance Technical committee, “LoRaWAN™ Regional Parameters”, LoRa™ Alliance, July 2016. [4] Hong Sun Hag, Cho Kyung Soon, “Full Stack Platform Design with MongoDB”, Journal of the Institute of Electronics and Information Engineers, THE INSTITUTE OF ELECTRONICS ENGINEERS OF KOREA, pp.152- 158. Dec 2016. [5] Brouwer, A.S.; van den Broek, M.; Seebregts, A.; Faaij, A. Impacts of large-scale Intermittent Renewable Energy Sources on electricity systems, and how these can be modeled. Renew. Sustain. Energy Rev. 2014, 33, 443–466. doi: 10.1016/j.rser.2014.01.076. [6] Kamaruzzaman, Z. Effect of grid-connected photovoltaic systems on static and dynamic voltage stability with analysis techniques—A review. Przeglad? Elektrotechniczny 2015, 1, 136–140. doi:10.15199/48.2015.06.27. [7] Hung, D.Q.; Shah, M.R.; Mithulananthan, N. Technical Challenges, Security and Risk in Grid Integration of Renewable Energy. In Smart Power Systems and Renewable Energy System Integration; Jayaweera, D., Ed.; Springer International Publishing: Cham, Switzerland, 2016; pp. 99–118. doi:10.1007/978-3-319-30427-4_6.
Copyright
Copyright © 2024 B. Ashwin Kumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET64054
Publish Date : 2024-08-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online