

Ijraset Journal For Research in Applied Science and Engineering Technology
Robotic Arm Vehicle for Planting
Authors: C. Chandra Sekhar, K. Gowthami, K. Revathi, K. Purushotham, K. Mounika Reddy, K. Gurudeep
DOI Link: https://doi.org/10.22214/ijraset.2024.58543
Certificate: View Certificate
Abstract
The advancement in Robotics technology has opened up new possibilities in many fields such as manufacturing, medical, industrial and defence. As agriculture labour becomes increasingly costly and scarce, we can displace workers with robotics technology, reducing the financial burden of small farmers. This paper aims to develop an android-controlled 6 DOF robotic arm and drill mechanism attached to a vehicle for planting a sapling. Through a drill mechanism, holes are made on one side and planting is done by a robotic arm on the other side. This prototype will be controlled using an Android application connected to the Arduino board via Bluetooth. Robotic arms are capable of performing a task repetitively.
Introduction
I. INTRODUCTION
The Earth's population is growing, and it is necessary to increase food production. According to survey, agricultural production, particularly field farming, will have to increase by 70 percent by 2050, when the global population should top the 9 billion human mark. Meanwhile, "this intensification of crop production is leading to increased waste, stimulation of irrigation water, the use of synthetic fertilizers and other phytosanitary products, potentially compromising the sustainability of the environment and the profits of farmers," Sylvestre wrote. In this context, using robots in agriculture is a promising response, especially in the context of precision agriculture. The latter in particular leverages technology to ensure that work is done with precision continuously and throughout the working day.The field of agricultural research into autonomous vehicles began in the early 1960s, with a focus on developing an automated steering system. By the 1990s, a great many other systems had been developed and were available commercially, but the industry was prompted to accelerate the development of this technology in part because of labour issues. That was especially true in the US, where increasing numbers of field-farm workers, many of whom are illegal immigrants, just can't be found at a reasonable price.
II. PROBLEM STATEMENT
Some of the tasks in agriculture are tough for farmers to perform by themselves. Shortage of labour is a major problem for farmers because it leads to late establishment of crops, uneven use of fertilizer, inadequate irrigation of crops, forces the farmers to shift to non-agricultural activities. Lack of interest in agriculture is due to less knowledge in technology.
III. LITERATURE SURVEY
The author of [1] gives insight into an Arduino-controlled Agribot that can plough, sow, and water farmland. Work presented by [2] showcases a four-wheel drive robot designed to sow seeds in ploughed farmland, reducing the need for human labour. The input device is a keypad, while an LCD is used as an intermediate device to display the input. In [3], a web-based control system for a robotic arm using the MQTT communication protocol and ESP8266 is designed and implemented. This platform allows for the remote manipulation of robotic devices in real-time, enabling accurate and precise control from any location. The paper in [4] aims to implement a pick-and-place robot on a four-wheeled drive vehicle to make it compatible for both industrial and non-industrial tasks. This study [5] presents the design, construction, and model of an Arduino-based robotic arm that can be controlled through a mobile application from a distance.
IV. EXISTING SYSTEM
Tractors are widely used in farming today. However, due to increasing fuel prices, using a tractor to work in farming is getting expensive for small farmers. As a result, they cannot afford to use modern agriculture techniques and equipment, so they do not benefit from these technologies. Most of the small landholders don’t use modern agriculture because of expensive equipment. Despite large-scale mechanization of agriculture in some parts of the country, most of the agricultural operations in larger parts are carried on by human hand using simple tools and implements such as wooden ploughs, rakes, etc. Hand tools such as dibblers or planting sticks are used to create holes in the soil.
V. METHODOLOGY
The methodology and the block diagram of the Robotic Arm Vehicle are presented in this section. To develop this prototype, the integration of hardware techniques and software tools is necessary. The block diagram in the figure provides a comprehensive overview of the various involved components. A robotic arm, which is a type of mechanical arm usually programmable with similar functions to a human arm, can pick and place things from one place to another. This action can be controlled by giving certain commands to the robotic arm.
Arduino Mega 2560 microcontroller is the main controller of the robotic arm vehicle. To develop this robotic system, the Arduino Mega is connected to the four DC motors, six Servo motors and an HC-05 Bluetooth module. DC motors are connected to wheels for mobility. The Vehicle body is equipped with a mechanism of drill which drill the soil on one side and after drilling the robotic arm picks up the sapling from the storage box and puts it into the hole.
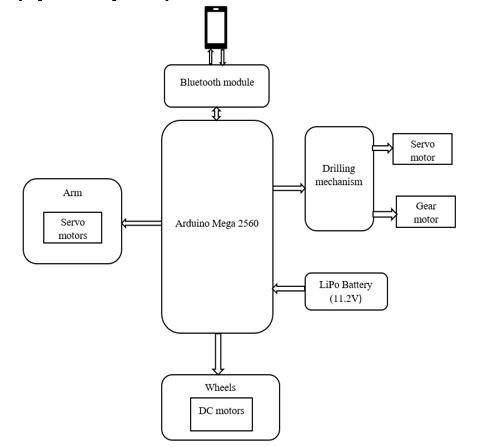
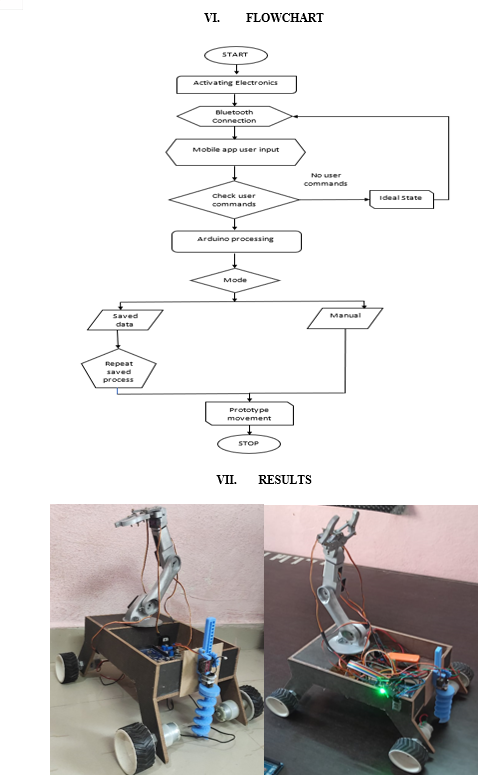
An Android controller app is used to operate the prototype. The app communicates with the robotic arm vehicle through Bluetooth. Once connected, we can begin sending commands to the robot using manual or saved programs for autonomous operation. In the manual mode, the Android app user can manually control the robot by pressing the directions keys on the app screen. The user can be able to control both the arm movements and the vehicle movements using the keys in application. The arm is controlled by sliders, and the movement direction is controlled by direction keypad.
When the user gives an arm motion command, the user's mobile application will send this command signal over Bluetooth. The Bluetooth receiver module will receive this command. Now, this module sends this command to Arduino Mega controller. The microcontroller decodes this command and activates the required servo motors so as to perform the required arm motion based on the user inputs. Lithium Polymer battery of 11.1V (nominal) and 1500mAh of capacity is used to power the microcontroller. This is a rechargeable battery.
Conclusion
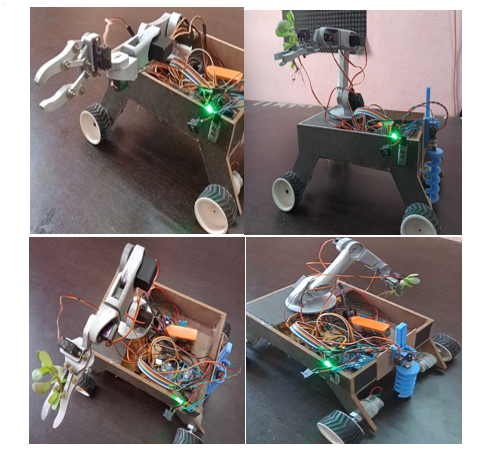
In conclusion, the development of a robotic arm vehicle for planting can revolutionize traditional planting methods by automating and enhancing efficiency. The main aim is to develop a four-wheeled vehicle equipped with a 6 DOF robotic arm and a drill mechanism, which can pick and place small plants such as tomato and cabbage, using an Arduino microcontroller. This prototype can be controlled via Bluetooth using a smartphone application developed with MIT app inventor. This can be upgraded by adding different tools for various purposes in farming such as spraying, weeding, sprinkling water, and also beneficial for gardening.
References
[1] Sujon, M.D.I., Nasir, R., Habib, M.M.I., Nomaan, M.I., Baidya, J. and Islam, M.R., 2018, March. Agribot: Arduino controlled autonomous multi-purpose farm machinery robot for small to medium scale cultivation. In 2018 international conference on intelligent autonomous systems (ICoIAS) (pp. 155-159). IEEE. [2] Jayakrishna, P.V.S., Reddy, M.S., Sai, N.J., Susheel, N. and Peeyush, K.P., 2018, September. Autonomous seed sowing agricultural robot. In 2018 International Conference on Advances in Computing, Communications and Informatics (ICACCI) (pp. 2332-2336). IEEE. [3] Fu, Shuangquan, and Pritesh Chandrashekhar Bhavsar. \"Robotic arm control based on internet of things.\" In 2019 IEEE Long Island Systems, Applications and Technology Conference (LISAT), pp. 1-6. IEEE, 2019. [4] \"Arduino Based Pick and Place Robotic Arm \", International Journal of Emerging Technologies and Innovative Research (www.jetir.org | UGC and ISSN Approved), ISSN:2349-5162, Vol.8, Issue 2, page no. pp2266-2269, February-2021. [5] Mohammed Ali, Hussein, Yasir Hashim, and Ghadah A AL-Sakkal. \"Design and implementation of Arduino based robotic arm.\" International Journal of Electrical and Computer Engineering 12, no. 2 (2022): 1411-1411. [6] G. V. Nagamani, International Journal of Research in Engineering, IT and Social Sciences, ISSN 2250-0588, Impact Factor: 6.565, Volume 13 Issue 05, May 2023, Page 40-48. [7] Cheng, Chao, Jun Fu, Hang Su, and Luquan Ren. \"Recent advancements in agriculture robots: Benefits and challenges.\" Machines 11, no. 1 (2023): 48.
Copyright
Copyright © 2024 C. Chandra Sekhar, K. Gowthami, K. Revathi, K. Purushotham, K. Mounika Reddy, K. Gurudeep. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58543
Publish Date : 2024-02-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online