

Ijraset Journal For Research in Applied Science and Engineering Technology
Rover with Enhanced Manipulation and Vision Capabilities
Authors: Aditya Pathare, Aditya Sharma, Prathik Shetty, Savir Shrigadi, Kalpesh Bagal
DOI Link: https://doi.org/10.22214/ijraset.2024.59653
Certificate: View Certificate
Abstract
From planetary exploration to terrestrial uses, rovers are essential in many sectors. This research aims to improve the adaptability and efficacy of the rover in a variety of contexts by presenting a revolutionary design that is outfitted with sophisticated manipulation and vision capabilities. Modern robotic grippers, arms, and vision systems are all integrated into the system architecture to provide a holistic solution for challenging jobs. The creation, integration, and coordination of these upgraded capabilities are described in depth in this work, with experimental data demonstrating improved performance and providing support. Case studies and real-world applications show the potential effect of the proposed rover, and talks about future work and problems offer ideas for additional improvements in rover technology. This work opens up new possibilities for improved capabilities in difficult circumstances and ads to the field of robotic exploration and manipulation
Introduction
I. INTRODUCTION
Due to their capacity to autonomously navigate across challenging terrain, rovers have become an essential tool for exploratory missions. Yet, it is essential to develop their manipulation and visual skills in order to maximise their efficacy and performance in challenging circumstances. The novel concept we present in this paper combines state-of-the-art robotic arms and vision systems with rover capabilities. Our approach's main goal is to transform rover capabilities by giving them the capacity to see, interact with, and traverse their environment with previously unattainable accuracy and flexibility. Our design enables rovers to efficiently and easily conduct complex tasks, including sample collection, equipment handling, and obstacle removal, by integrating cutting-edge robotic arms. Moreover, our vision systems give rovers sophisticated sensing and perception skills, enabling them to instantly assess and comprehend their surroundings. Because of this, rovers can make well-informed judgements and modify their course of action accordingly, even under erratic and changing circumstances. This study's capacity to properly overcome the constraints of existing rover technology is one of its main accomplishments. Our concept provides an all-encompassing response to the changing requirements of exploration and intervention missions by bridging the gaps in current rover capabilities.
II. Literature Review
A. Rover Architecture
The MinSAC architecture, short for Miniature Sample Acquisition and Caching, employs a unique approach to sample acquisition and caching in robotic exploration missions. In this architecture, samples are acquired directly into specialised sample tubes during the sampling process. The MinSAC architecture revolutionises sample acquisition and caching in robotic exploration missions. Samples are acquired directly in specialised tubes and transferred using "bit change-out" for efficiency. Integrated robotic arms minimise subsystem complexity, optimising rover payload capacity. Additionally, this approach minimises the volume required for storing the cached samples, allowing for more efficient use of space within the rover's payload. To further optimise the design for small rovers with limited payload capacity, the MinSAC architecture utilises the same robotic arm responsible for sample acquisition to also perform tube transfer operations. This integrated approach minimises the overall mass and volume of the Sample Acquisition and Caching (SAC) subsystem, reducing the complexity and resource requirements of the rover system.[1]
B. Robotic Arm Manipulation and Grasping
Grasping, a fundamental aspect of robotic manipulation, relies on mechanical interactions between a gripper and the object it aims to grasp. Grasping in robotics relies on mechanical principles dictating interactions between grippers and objects. Various gripper types, based on mechanical features, offer versatility and task-specific advantages. These grippers are categorised for diverse handling needs and applications.
The mechanical features discussed extend beyond grippers to other robotic systems. Classification aids in understanding and comparing diverse grasping approaches in robotics. These principles serve as the foundation for various types of robotic grippers, each offering unique advantages and suited to specific tasks and environments. While somewhat arbitrary, this classification framework aims to organise the myriad of gripper designs into coherent categories, facilitating understanding and comparison.[2]
C. Innovations in Vision Systems
Rover vision systems play a crucial role in providing visual perception and situational awareness to robotic exploration vehicles, enabling them to navigate, analyse, and interact with their environment effectively. Historically, these vision systems have predominantly relied on solid-state imaging technologies such as CCD (charge-coupled device) or CID (charge injection device). In contrast, CMOS-based APS technology offers several advantages, including direct readout electronics typically implemented through field-effect transistors (FETs). In CMOS sensors, electronic charge is trapped in potential wells within individual pixels, acting as capacitors. The transition from CCD or CID to CMOS APS technology represents a significant advancement in rover vision systems. CMOS sensors offer improved performance, lower power consumption, and potentially higher levels of integration compared to their CCD or CID counterparts.[3]

IV. ENHANCED MANIPULATION CAPABILITIES
This section would briefly explain the robotic arm capabilities:
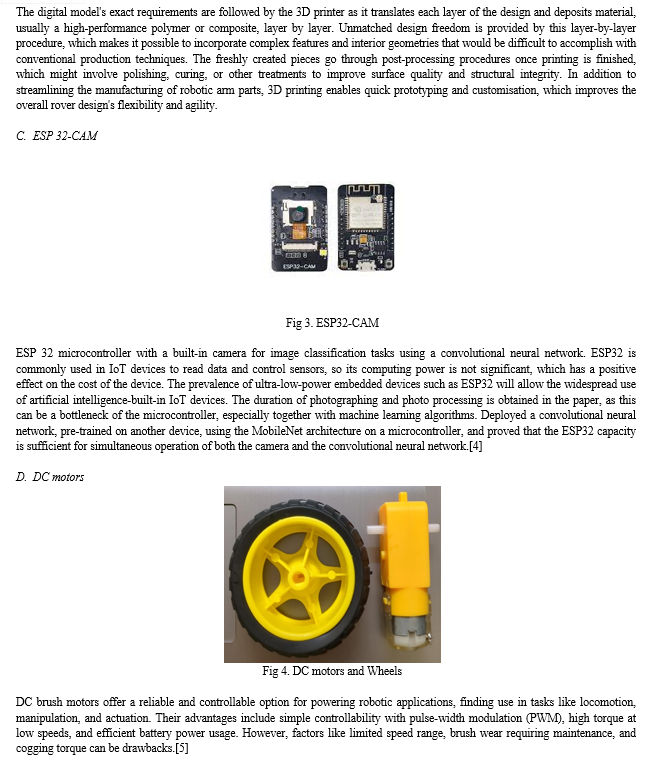
A. Design and Fabrication
The 5-DOF robotic arm's complex and customised pieces may now be created via 3D printing, resulting in a build that is both lightweight and robust. The structural elements of the printed arm are guaranteed to match the mechanical specifications thanks to the use of sophisticated materials throughout the printing process. A robotic arm is an artificial arm designed to carry out specific activities. For many non-human scenarios where human communication is impossible, there are more and more reasons to construct robotic arms nowadays. People pick up things without thinking about the procedures necessary, and robotic arms that are controlled manually via wired and wireless technology are also used. [8]
???????B. Degrees of Freedom and MG996R Servo Motors
The robotic arm's 5-DOF architecture suggests that it can move and articulate in five separate directions, giving it more versatility while doing manipulation tasks. This versatility is made possible in large part by the MG996R servo motors, which supply the torque and control required for every degree of freedom. They are ideal for precise applications like managing the joints of a robotic arm because of their dependable performance. The 5-DOF robotic arm offers enhanced maneuverability with independent movement along five axes. Its versatility is enabled by MG996R servo motors, providing precise control and torque. These motors facilitate precise joint management, crucial for manipulation tasks. MG996R servo motors incorporate feedback control mechanisms for accurate position, speed, and acceleration control. Together, they empower the robotic arm to perform complex tasks with reliability and efficiency.
???????C. Control System
Position control algorithms are implemented by the control system that operates the MG996R servo motors in the 5-DOF arm. A complicated movement may be performed by the arm through the combined control of all servo motors, each of which is in charge of driving a specific joint. The arm's segments may be positioned precisely and consistently because to the servo motors' responsiveness to input signals. Position control algorithms are essential components of the control system governing the operation of the MG996R servo motors within the 5-DOF robotic arm. Position control algorithms manage MG996R servo motors in a 5-DOF robotic arm, enabling precise joint positioning. These algorithms orchestrate coordinated movements for executing complex tasks efficiently. The arm's segments achieve consistent and accurate positioning due to the servo motors' responsiveness to input signals. MG996R servo motors offer reliability and smoothness in executing intricate movements, crucial for diverse applications. Overall, these components enhance manipulation capabilities in fields like manufacturing and research.
V. VISION CAPABILITES
The rover's visual skills play a crucial role in facilitating all-encompassing observation and augmenting its versatility in a variety of situations. The rover incorporates a complex vision system that uses the latest developments in computer vision algorithms, cameras, and sensors.
???????A. Cameras and Sensors
High-resolution cameras included into the rover's vision system can capture precise pictures in a range of lighting situations. The camera configuration is enhanced with advanced sensors, such as ESP32 cam, which offer more information for environmental study. Together, these sensors provide a thorough awareness of the rover's environment, facilitating accurate obstacle identification and navigation. ESP32 SoC is the second generation of Espressif corporation IoT solution and it includes WiFi and Bluetooth. It is based on the 32-bit RISC Tensilica Xtensa LX106 MCU with included FPU and DSP. Clock speed is 240 MHz, and it has 520 KB SRAM. Ivkovic put it in the MCU IoT Ready group because of FPU, DSP and WiFi components integrated.[9]
???????B. Computer Vision Algortihms
The rover's perception is greatly improved by the use of cutting-edge computer vision technologies. These studies-inspired algorithms provide the rover the ability to carry out tasks like object tracking, feature identification, and depth perception. The rover's capacity to adapt and learn from its surroundings is further strengthened by machine learning techniques, which gradually improve its decision-making abilities.
A system using an Esp32 cam, wifi module, motor driver system, and FTDI USB-UART interface board has been developed to fulfill this requirement. In such scenarios, we cannot hamper human life and put another human's life in danger by exposing them to such acute and severe diseases just for monitoring. We should not waste lives, especially of those of great value to the system due to their knowledge, such as doctors and nurses, and we should try and provide them with a device that could enter the contaminated areas and allow them to see what is happening.[10]
VI. INTEGRATIONS AND CO-ORDINATION
The rover's overall efficacy depends on the smooth integration of improved manipulation and vision capabilities into a coherent system. The sophisticated vision system and the robotic arm's superior manipulation characteristics work together harmoniously to overcome obstacles and provide a synergistic platform for intelligent interaction with the environment.
???????A. Integration of Manipulation and Vision
Aligning the vision system's output with the manipulation system's input needs is a necessary step in the integration process. With its sophisticated cameras and sensors, the vision system records information about the rover's environment in real time. After that, computer vision techniques are applied to this data to detect items of interest and provide spatial information. Using this data, the robotic arm-powered manipulation system performs accurate motions and interactions.
???????B. Challenges and Solution
Difficulties with integration might include sensor calibration discrepancies or latency problems that impair real-time responsiveness. Strict calibration and testing protocols are used to solve these issues. The smooth interaction between the systems is ensured by coordination between the development teams responsible for vision and manipulation. Furthermore, putting in place strong feedback mechanisms and communication protocols reduces latency issues and allows the rover to react quickly to visual inputs from its surroundings.


Based on the location accuracy of manipulated objects, task completion time, and navigation success rate, the rover's manipulation and vision skills were quantitatively evaluated. The precision of object recognition and the capacity to adjust to abrupt changes in the surroundings were important measures of the vision system's effectiveness. Qualitative data showed the rover's capacity to deal with unforeseen hurdles and adjust to changing situations, offering insights into overall performance. A thorough grasp of the rover's capability was aided by observations about the precision of the robotic arm in manipulation activities and the responsiveness of the vision system to environmental cues.
???????C. Performance Comparison
Notable differences were found while comparing the rover's performance with current systems or benchmarks. The 5-DOF robotic arm's improved manipulation capabilities, together with the vision system's effectiveness, presented a competitive advantage. Comparing the rover to benchmarked systems, it demonstrated better flexibility in negotiating intricate terrain and precisely handling things. The effectiveness of the integrated system in striking a balance between autonomy, perception, and manipulation was highlighted by these results.
VIII. APPLICATIONS AND CASE STUDIES
A rover with improved vision and manipulation skills finds many uses in several fields, transforming the way robotic systems interact with and move through challenging situations. The incorporation of a 5-degree-of-freedom robotic arm, sophisticated vision systems, and state-of-the-art control algorithms enhances the rover's practicality.
???????A. Search and Rescue Operations
The rover's cutting-edge vision system can effectively travel through rubble in disaster-stricken areas, detect survivors, and give vital situational awareness. Its item manipulation skills are improved by the 5-DOF robotic arm, which makes it possible for it to clear paths and carry necessary supplies to unreachable areas.
???????B. Planetary Exploration
Because of its accuracy and versatility, the rover is a great choice for planetary exploration missions. The robotic arm makes it easier to gather samples or set up scientific equipment in alien locations, while the improved vision system allows for in-depth geological study. This was shown in simulated Martian environments, where the rover demonstrated its agility and efficiency in carrying out scientific missions.
???????C. Industrial Inspection and Maintenance
The rover's vision system may be used in industrial settings to examine vital infrastructure, such storage tanks, reactors, and pipelines. Because of its manipulation capabilities, the robotic arm can perform maintenance jobs in tight or dangerous places, which lowers the need for human involvement and improves operational safety.
???????D. Agricultural Automation
The rover can go through fields in precision agriculture, using its vision system to track crop health and identify irregularities. By using the robotic arm for focused interventions like accurate pesticide application or soil sample, agricultural operations and resource utilisation may be optimised.
IX. CHALLENGES AND FUTURE WORK
A. Challenges Faced
The integration of the robotic arm's 3D-printed parts with the mechanical framework presented difficulties for the rover's development, necessitating repeated refinements to the printing process and material choices. Calibration adjustments had to be made carefully in order to align the vision and manipulation systems. It was challenging to optimise the power management system for improved functionalities, requiring a careful balancing act between energy efficiency and performance.
???????B. Solutions Implemented
To tackle these obstacles, a thorough strategy was implemented. To improve the structural integrity of 3D-printed items, iterative testing and improvement were carried out. The implementation of strict calibration processes and cooperative efforts between the software, electrical, and mechanical engineering teams guaranteed comprehensive problem-solving. Through modelling and experimental testing, the power management system was optimised to provide a balanced solution that satisfied the rover's energy requirements without sacrificing performance.
???????C. Future Enhancements and Research Directions
The goal of rover technology research in the future is to expand on the achievements of the present project and discover new areas. Important areas for further development and research efforts consist of:
- Advanced Autonomy
- Multimodal Perception
- Swarm Robotics
- Human-Rover Interaction
- Energy Harvesting
- Adaptable Manipulation Tools
- Environmental Adaptability
- Collaborative Research Platforms
Conclusion
While undergoing the dynamic process of growth, our rover leaves the lab and faces and conquers obstacles like unfavourable weather and uneven terrain. Every experience with real-world challenges refines it, transforming wounds and bruises into strokes of advancement. The rover resists gravity and discovers hidden passages thanks to its upgraded sensors and well calibrated motors. During testing in the field, it becomes a tough explorer that uses advanced algorithms and environmental sensors to discover the delicate balance of life in uncharted territory. The rover is an essential instrument for scientific study as it collects key environmental data and helps with animal monitoring. This continuing project demonstrates the boundless potential of creation in the face of uncertain circumstances by showcasing the transformational journey of our paper prototype into a versatile knowledge emissary.
References
[1] P. Backes, P. Younse and A. Ganino, \"A minimum scale architecture for rover-based sample acquisition and caching,\" 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2013, pp. 1-10, doi: 10.1109/AERO.2013.6497399. keywords: {Electron tubes;Robots;Grippers;Mars;Actuators;Rocks;Springs}, [2] Babin, V., & Gosselin, C.(2021). Mechanisms for robotic grasping and manipulation. Annual Review of Control, Robotics, and Automation Systems, 4, 573-593 [3] Ellery, A. (2016).Rover vision-fundamentals. In: planetary rovers. Springer Praxis Books(). Springer, Berlin, Heidelberg. [4] Sineglazov, Victor, and Volodymyr Khotsyanovsky. \"Camera Image Processing on ESP32 Microcontroller with Help of Convolutional Neural Network.\" (2022). [5] Comparison of Different Drives for a Mobile Robot\" by M.A. Rahman, M.O. Tokhi, and S.M. Shahed in the 2008 IEEE International Conference on Industrial Technology [6] Y. Yorozu, M. Hirano, K. Oka, and Y. Tagawa, “Electron spectroscopy studies on magneto-optical media and plastic substrate interface,” IEEE Transl. J. Magn. Japan, vol. 2, pp. 740–741, August 1987 [Digests 9th Annual Conf. Magnetics Japan, p. 301, 1982]. [7] Bell, C. (2022). Introducing the Raspberry Pi Pico. In: Beginning MicroPython with the Raspberry Pi Pico. Maker Innovations Series. Apress, Berkeley, CA. https://doi.org/10.1007/978-1-4842-8135-2_1 [8] Indirapriyadharshini, J., et al. \"Design and fabrication of 5 degrees of freedom robotic arm.\" AIP Conference Proceedings. Vol. 2914. No. 1. AIP Publishing, 2023. [9] Dokic, Kristian. \"Microcontrollers on the edge–is esp32 with camera ready for machine learning?.\" Image and Signal Processing: 9th International Conference, ICISP 2020, Marrakesh, Morocco, June 4–6, 2020, Proceedings 9. Springer International Publishing, 2020. [10] Verma, Kartikeya, et al. \"Internet Regulated ESP32 Cam Robot.\" 2023 7th International Conference On Computing, Communication, Control And Automation (ICCUBEA). IEEE, 2023.
Copyright
Copyright © 2024 Aditya Pathare, Aditya Sharma, Prathik Shetty, Savir Shrigadi, Kalpesh Bagal. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59653
Publish Date : 2024-03-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online