

Ijraset Journal For Research in Applied Science and Engineering Technology
Security Drone for Surveillance in Military
Authors: Nallu Sahithya, D. Srinivasulu Reddy, Vattivella Chandu, G. Sai Yashaswini, Akula Mounika Reddy, G. Sukrutha
DOI Link: https://doi.org/10.22214/ijraset.2024.58557
Certificate: View Certificate
Abstract
This paper presents the design and development of a sophisticated military security drone equipped with advanced components including Pixhawk flight controller, GPS module, camera, receiver, telemetry system, BLDC (Brushless Direct Current) motors, and electronic speed controller (ESC). The Pixhawk flight controller serves as the brain of the drone, managing flight dynamics, navigation, and mission planning with remarkable precision and reliability. Integrated with a high-accuracy GPS module, the drone achieves autonomous navigation capabilities, enabling it to execute pre-defined flight paths and perform missions with minimal human intervention. A high-resolution camera system is incorporated into the drone, providing real-time video surveillance and reconnaissance capabilities. This camera system is complemented by a receiver module, facilitating remote control and data transmission between the drone and ground control station.Furthermore, the telemetry system enables remote monitoring of the drone\'s vital parameters, including altitude, speed, battery status, and sensor readings. This real-time telemetry data enhances situational awareness and facilitates informed decision-making during missions.The propulsion system of the drone consists of BLDC motors and electronic speed controllers, offering efficient and reliable propulsion for sustained flight operations. These components are carefully integrated to optimize power consumption, flight endurance, and maneuverability, ensuring the drone\'s effectiveness in various operational scenarios. In summary, the integration of Pixhawk flight controller, GPS module, camera, receiver, telemetry, BLDC motors, and electronic speed controller in the design of the military security drone represents a significant advancement in unmanned aerial technology. The resulting drone platform offers enhanced capabilities for surveillance, reconnaissance, and security applications, contributing to the effectiveness and efficiency of military operations in diverse environments.
Introduction
I. INTRODUCTION
In modern military operations, the utilization of unmanned aerial vehicles (UAVs) has become increasingly prevalent due to their versatility, efficiency, and effectiveness in providing surveillance, reconnaissance, and security capabilities. Among these UAVs, the integration of advanced technologies such as Pixhawk flight controller, GPS module, camera systems, receiver modules, telemetry systems, BLDC (Brushless Direct Current) motors, and electronic speed controllers (ESCs) has revolutionized the capabilities of military security drones. The deployment of military security drones equipped with these advanced components represents a significant leap forward in enhancing situational awareness, mission effectiveness, and operational efficiency for defence and security forces. This introduction provides an overview of the key components and functionalities of such drones.
- Pixhawk Flight Controller: The Pixhawk flight controller serves as the central processing unit of the drone, governing its flight dynamics, navigation, and mission planning. Known for its reliability and versatility, the Pixhawk enables autonomous flight capabilities, allowing the drone to execute predefined missions with precision and accuracy.
- GPS Module: Integrated with the Pixhawk flight controller, the GPS module provides high-accuracy positioning data, enabling autonomous navigation and waypoint following. This ensures that the drone can navigate complex environments and execute missions with minimal human intervention.
- Camera Systems: Equipped with high-resolution cameras, military security drones capture real-time imagery and video footage, providing crucial visual intelligence for surveillance and reconnaissance missions. These camera systems are often equipped with pan-tilt-zoom capabilities, allowing operators to focus on specific areas of interest.
- Receiver Modules: Receiver modules enable communication between the drone and ground control station, facilitating remote control and data transmission. This allows operators to monitor the drone's status, adjust flight parameters, and receive real-time video feeds during missions.
- Telemetry Systems: Telemetry systems provide remote monitoring of the drone's vital parameters, including altitude, speed, battery status, and sensor readings. This data is transmitted in real-time to the ground control station, enhancing situational awareness and enabling informed decision-making during missions.
- BLDC Motors and Electronic Speed Controllers (ESCs): The propulsion system of the drone consists of BLDC motors and ESCs, offering efficient and reliable propulsion for sustained flight operations. These components are carefully integrated to optimize power consumption, flight endurance, and maneuverability, ensuring the drone's effectiveness in various operational scenarios.
Top of Form
Bottom of Form
The organizational framework of this study divides the research work in the different sections. The Literature survey is presented in section 2. In section 3 and 4 discussed about Existing and proposed system methodologies. Further, in section 5 shown Simulation Results is discussed and Conclusion and future work are presented by last sections 6.
II. LITERATURE SURVEY
The preliminary research that was carried out by several authors on this appropriate work and we are going to take some important articles into consideration and further extend our work.
Amarjot Singh “Eye in the sky: Real- time Drone Surveillance (DSS) for Violent Individuals Identification using Scatter Net Hybrid Deep Learning Network”. The paper proposed the real-time Drone Surveillance System (DSS) framework that can detect one or more individuals engaged in violent activities from aerial images [1].
K.VV.Mani Sai Kumar, M d Sohail and Dr. Usha Rani “Crowd Monitoring and Payload Delivery Drone using Quadcopter based UAV System”. Quad copter is designed in this paper was used to carry the payload of 250g m cover from one place to another with 6min flight was tested. By mounting high resolution wireless camera, and used for monitoring the crowd in the campus. It can be used for surveillance applications [2].
Velan Y,Musica “Cost Effective Design and Development of Manned Drone”. Unmanned Aerial Vehicles, referred to as drones are aerial platforms that fly without a human pilot onboard. UAV’s are controlled autonomously by a computer in the vehicle or under the remote control of a pilot stationed at a fixed ground location [3].
Pooja Srivastava, Tejaswi Ninawe, Chitral Puthran, Vaishali Nirgude “Quadcopter for Rescue Missions and Surveillance”. For developing a small and compact sized quadcopter which can be used to carry out rescue operations and provide audio/video aid to the people in distress.It saves human pilots from flying in dangerous conditions that can be encountered not only in military applications but also in other scenarios involving operation in bad weather conditions, or near to buildings, trees, civil infrastructures and other obstacles[4].
Mr. Kalpesh N. Shah, Mr. Bala j. Dutt, Hardik Modh “Quadrotor – An Unmanned Aerial Vehicle”.To study the complete designing process of quadrotor from the engineering perspective and to fabricate working model of UAV-Quadrotor with improvement in its weight carrying capacity [5].
Rajeshwari Pillai Rajagopala “Drone: Guidelines, Regulations and policy gaps in India” (ISBN journal). This paper examines drone operations in India and analyses the major policy gaps in the country’s evolving policy framework. It argues that ad-hoc measures taken by state and central agencies have been ineffective, whether in addressing issues of quality control, or response mechanisms in the event of an incident, questions of privacy and trespass, air traffic, terrorist threat management, and legal liability[6].
III. EXISTING METHOD
The existing method of military drone deployment utilizing flight controllers, cameras, receivers, ESCs (Electronic Speed Controllers), and BLDC (Brushless Direct Current) motors typically follows a structured process to ensure effective operation. Below is an overview of the existing method.
A. Design and Integration
Military drones are designed to meet specific operational requirements, considering factors such as payload capacity, flight endurance, and environmental conditions.
Flight controllers, such as Pixhawk or similar systems, are selected based on their reliability, versatility, and compatibility with mission objectives.
High-resolution cameras with advanced imaging capabilities are integrated into the drone to capture real-time imagery and video footage for surveillance and reconnaissance purposes.
Receiver modules are chosen to establish communication links between the drone and the ground control station, enabling remote control and data transmission. BLDC motors and ESCs are selected based on their efficiency, power output, and compatibility with the drone's design specifications.
B. Assembly and Testing
Components are assembled according to the drone's design specifications, ensuring proper integration and functionality.Flight controllers are programmed with mission parameters, including flight paths, waypoints, and operational modes.
Camera systems are calibrated and tested to ensure optimal performance and image quality.Receiver modules are configured to establish reliable communication links with the ground control station.BLDC motors and ESCs are calibrated to optimize propulsion efficiency and flight stability.
C. Operational Deployment
Prior to deployment, the drone undergoes pre-flight checks to verify system integrity and functionality. Mission parameters, including flight plans and operational objectives, are finalized and loaded into the flight controller.The drone is launched from a designated location and begins executing its mission according to predefined parameters. Operators monitor the drone's status and receive real-time video feeds from the on-board cameras via the ground control station. In the event of mission adjustments or emergencies, operators can remotely control the drone's flight path and behaviour using the receiver module.
D. Post-Mission Analysis
Upon completion of the mission, data collected by the drone, including imagery and telemetry information, is analysed to extract actionable intelligence. Performance of the drone and its components is evaluated to identify any issues or areas for improvement. Maintenance and repairs are performed as necessary to ensure the drone remains operational for future missions.The block diagram of existing method is shown in figure 1.
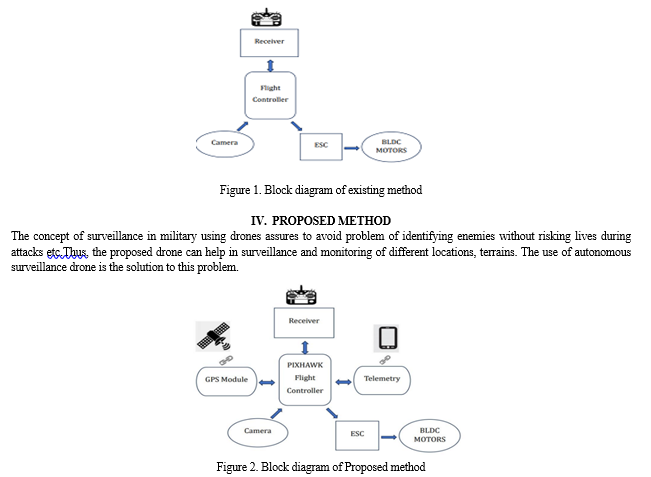
The block diagram of a drone system is shown in figure 2. It shows the different components of the drone and how they are connected.
The components of the drone system include a receiver, GPS, camera, ESC, BLDC motors, telemetry, and a Pixhawk flight controller.
The receiver is connected to the Pixhawk flight controller, which is connected to the ESC and BLDC motors. The GPS and camera are also connected to the Pixhawk flight controller. The receiver is a device that receives signals from the remote control and sends them to the flight controller.
These signals typically include commands for various drone functions, such as throttle, pitch, roll, and yaw. The receiver then relays these commands to the flight controller. The GPS is used to determine the drone’s location and altitude. It relies on signals from multiple satellites to calculate the drone's position with high accuracy. This information is crucial for features like waypoint navigation, return to home, and geofencing. The camera is used to capture images and video. Drones can be equipped with various types of cameras, including RGB cameras for photography, and specialized cameras for tasks like thermal imaging or multispectral analysis.
The camera's feed is often transmitted to the operator's ground station for realtime monitoring or recording.The ESC (Electronic Speed Controller) controls the speed of the motors. An electronic speed controller or ESC is a device installed to a remote-controlled electrical model to vary its motor's speed and direction.
It needs to plug into the receiver's throttle control channel.The BLDC motors (Brushless DC motors) are used to power the drone and provide lift.
They are more efficient and durable compared to brushed motors. BLDC motors are often used in combination with propellers to generate thrust and lift, allowing the drone to move in different directions.The telemetry is used to transmit data between the drone and the ground station.
It can include information such as battery voltage, GPS coordinates, altitude, and more. Telemetry data is crucial for real-time monitoring, mission planning, and ensuring the drone's safe operation. The Pixhawk flight controller is the brain of the drone, which processes all the data from the sensors and controls the drone’s movement. It processes data from various sensors, including GPS, accelerometers, gyroscopes, and barometers. The flight controller uses this data to stabilize the drone, control its movement, and execute flight plans. It also manages communication with other components like ESCs, GPS, and telemetry.
V. METHODOLOGY
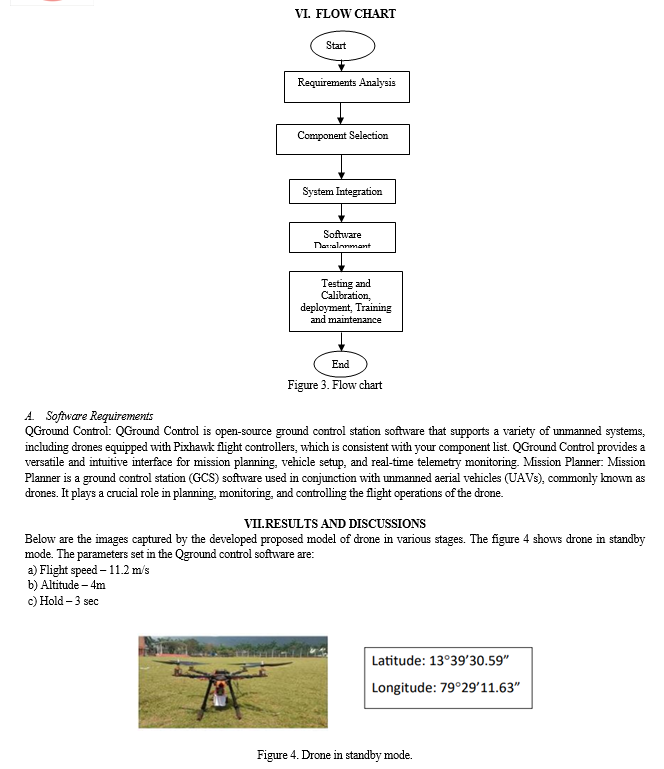
- Requirements Analysis: Define the operational requirements and mission objectives for the military security drone, considering factors such as surveillance range, payload capacity, flight endurance, and environmental conditions.
- Component Selection: Research and select appropriate components including Pixhawk flight controller, GPS module, high-resolution camera, receiver module, telemetry system, BLDC motors, and electronic speed controller based on their compatibility, reliability, and performance characteristics.
- System Integration: Integrate the selected components into the drone's airframe, ensuring proper wiring, mounting, and compatibility between different subsystems. Configure the Pixhawk flight controller to communicate with the GPS module, camera, receiver, telemetry system, BLDC motors, and electronic speed controller.
- Software Development: Develop and customize software algorithms for the Pixhawk flight controller to enable autonomous flight capabilities, waypoint navigation, and mission planning. Implement image processing algorithms to enable real-time video streaming and analysis from the onboard camera system. Develop software interfaces for telemetry data transmission and reception between the drone and ground control station.
- Testing and Calibration: Conduct comprehensive testing of the drone's subsystems, including flight control, navigation, camera, telemetry, and propulsion systems. Calibrate sensors, actuators, and communication modules to ensure accurate and reliable operation under various operating conditions.
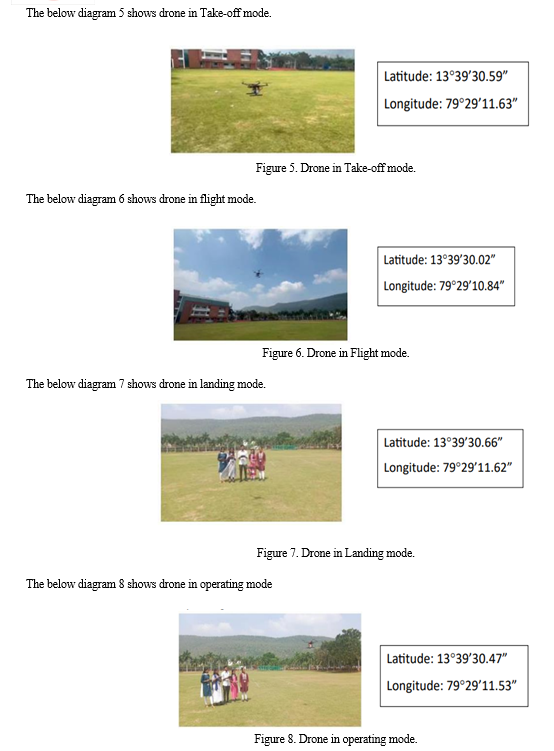
- Flight Testing: Perform flight testing in controlled environments to evaluate the drone's performance, stability, and reliability.Operational Deployment: Deploy the military security drone in operational environments. Conduct field trials and exercises to assess the drone's effectiveness in fulfilling mission objectives such as surveillance, reconnaissance, and security monitoring. Gather feedback from operators and stakeholders to identify areas for improvement and refinement.
- Training and Maintenance: Provide training to operators and maintenance personnel on the operation, maintenance, and troubleshooting of the military security drone system.
VIII. FUTURE SCOPE
The future scope of military security drones is vast and continuously evolving, driven by advancements in technology, changing threat landscapes, and emerging operational requirements. Some potential areas of future development and enhancement for military security drones include:
Further advancements in artificial intelligence and machine learning could enable military security drones to operate autonomously with minimal human intervention. This includes autonomous mission planning, adaptive decision-making, and real-time situational awareness capabilities.
Conclusion
The importance of drone technology is quite clear from the above discussion. Drones have found many applications in various sectors. They have become increasingly popular due to their compact size and extensive capabilities. With more weight capacity, powerful and advanced technology, longer flight duration, and maneuverability, drones could be much more effective in the future than they are now. From agriculture and construction to public safety, security, waste management, sanitation, traffic monitoring, etc., drones have huge scope. Therefore, governments and businesses should build the necessary infrastructure and use drones with advanced capabilities to improve businesses.
References
[1] Amorjotsingh “eye in the sky: real time drone surveillance (DSS) for violent individual identification using scatter net hybrid deep learning network”(10/11/2018,pg no. 1710). [2] K.VV.Manisaikumar, M d Sohail and DR. Usha rani “ crowd monitoring and payload delivery drone using quadcopter based UAV system” (ICSSIT journal, pg no. 1522). [3] Velan Y, Musica “Cost effective design and development of manned drone” (ICRAAE journal, pg no. 1126). [4] PoojaShrivastav,TejaswiniNinawe,ChitralPuthran,VaishaliNirgude “Quad copter for rescue mission and surveillance” (IOSR journal, p-ISSN: 2278-8727, PP48-52).Encrypted Wi-Fi Traffic. IEEE Trans. Inf. Forensics Secur. 2019, 15, 2346–2360. [5] Mr. Kalpesh N. Shah, MrBala J. Dutt, HardikModh “Quadcopter- An unmanned aerial vehicle” (2014 IGEDR, vol-2, issue-1). [6] Rajeshwari Pillai Rajagopala “Drone: Guidelines, Regulations and policy gaps in India” (ISBN journal). [7] Ishii Keita; Harashima Katsumi research paper \"Optimal Layout of Purchased Delivery Drones at An Outlet Mall\" (published in the International Journal of Engineering Research & Technology in 2018). [8] Babar Shahzaad; Athman Bouguettaya. research paper \"Service-Oriented Architecture for Drone-based Multi-Package Delivery\" (published in the International Journal of Innovative Technology and Exploring Engineering in 2019) presents a study on the design and implementation of a real- time monitoring system. [9] Batool Madani; Malick Ndiaye research paper \"Hybrid Truck-Drone Delivery Systems: A Systematic Literature Review\" (published in the International Journal of Engineering and Technology in 2018). [10] Desheng Wang; Peng Hu; Jingxuan Du “Routing and Scheduling for Hybrid Truck-Drone Collaborative Parcel Delivery With Independent and TruckCarried Drones” published in IEEE Internet of Things Journal ( Volume: 6, Issue: 6, December 2019). [11] Mao Nishira; Satoshi Ito; Hiroki Nishikawa research paper \"An ILP-based Approach to Delivery Drone Routing under Load-dependent Flight Speed\" (published in the International Journal of Innovative Research in Science, Engineering, and Technology in 2018).
Copyright
Copyright © 2024 Nallu Sahithya, D. Srinivasulu Reddy, Vattivella Chandu, G. Sai Yashaswini, Akula Mounika Reddy, G. Sukrutha. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58557
Publish Date : 2024-02-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online