

Ijraset Journal For Research in Applied Science and Engineering Technology
Self Balancing Robot using Arduino
Authors: Shreyash Ramteke, Gaurav Ghyar, Sagar Kute, S. K. Gawade
DOI Link: https://doi.org/10.22214/ijraset.2024.63172
Certificate: View Certificate
Abstract
This research paper presents the design, development, and implementation of an Arduino micro controller-based self-balancing robot. This study looks at how sensors, actuators, and control algorithms can work together to provide stable and dependable balance control. The Two-Wheeled Self-Balancing Robot (TWSBR) was controlled in this work using a Proportional, Integral, and Differential (PID) controller. The suggested system makes use of a PID control algorithm for accurate motor speed adjustment and an inertial measurement unit (IMU) for real-time orientation monitoring of the robot[4]. The two DC stepper motors applied the proper amount of torque in the right direction, which allowed the structure to maintain a vertical equilibrium state. The robot measures its tilt and angular velocity with a gyroscope sensor. The outcomes of the experiments indicate that the suggested method is efficient in preserving equilibrium in different circumstances, highlighting the possibilities of Arduino based systems for the creation of self-governing robotic systems. Through iterative testing and improvement [2], the objective is to build a self-balancing robot that is sturdy and steady and can navigate and adapt to various surfaces and disturbances.
Introduction
I. INTRODUCTION
Self-balancing robots are an exciting branch of robotics due to their remarkable stability and agility as well as their potential to completely transform daily life and various industries. Imagine a robot that can move gracefully through obstructions and quickly adjust its balance while navigating a variety of terrain. This kind of robot represents the potential of autonomous systems that are driven by cutting-edge technology.
The marriage of complex control algorithms and reliable hardware platforms—best exemplified by the combination of Arduino micro controller technology and the idea of self-balancing robots—is at the core of this innovation. This marriage promises progress in the areas of agility, adaptability, and practicality in addition to stability.
Because of their increased speed, stability, and maneuverability, self-balancing robots have become highly versatile platforms with applications across multiple domains [2]. These robots use dynamic control mechanisms, which adapt wheel acceleration in response to variations in the inclination angle measured from the pivot point, to maintain equilibrium by utilizing inverted pendulum technology. This idea of an inverted pendulum, transformed into a structure that is mounted on a cart, serves as the foundation for accurate stability control made possible by advanced controllers and feedback loops.
The agility and compactness of self-balancing robots provide them a distinct advantage over their conventional wheeled counterparts in the field of robotics, especially when maneuvering through tight spaces and carrying out complex tasks. These robots find applications in a variety of settings, ranging from personal assistance and entertainment to industrial automation. To ensure dependable performance, robust control strategies are required.
Maintaining the upper body structure at a predetermined pitch angle is crucial for smooth movement and stability of self-balancing robots. Sophisticated control algorithms that can handle the system's intrinsic instability and nonlinear dynamics are needed to achieve this balance [1]. Numerous control methodologies, such as fuzzy PID, model predictive control, and classical PID control, have been investigated to tackle these issues and improve stability in a range of operational scenarios.
In order to create a self-balancing robot, this study uses an Arduino micro controller in conjunction with a Proportional, Integral, and Differential (PID) controller to provide precise stability control. In order to detect tilt and angular velocity, the system uses sensors like gyroscopes within an Inertial Measurement Unit (IMU) [4]. This allows for real-time feedback for the best possible motor control. The robot's increased responsiveness and agility are a result of its effective processing of sensor data, which is made possible by the Arduino boards' computational power.
Moreover, the robot's capacity to independently control each wheel improves its maneuverability, enabling a variety of movement patterns, including circling and turning. This research aims to improve stability and resilience, especially in response to unexpected disturbances encountered during operation, by implementing automated PID control.
Through the design, development, and implementation of an Arduino self balancing robot, we explore the complex interactions between sensors, actuators, and control mechanisms in this paper. This work advances the field of self-balancing robotics by providing a thorough examination of the design process and experimental validation.
II. OBJECTIVES
- Design and Construction: The self-balancing robot's construction, design, and parts are covered, including the sensors, actuators and Arduino control system that were chosen.
- Control Algorithm Development: Develop and implement a self-balancing robot control algorithm. Discuss the theory and methodology underlying the algorithm, highlighting any advancements or novelties over current practices.
- Sensor Fusion: Examine methods for combining sensors to increase the robot's accuracy and stability when balancing. Integrating data from accelerometer, gyroscopes, and other sensors may be necessary for this.To obtain the minimum time taken for a measuring orcontrol.
III. LITERATURE REVIEW
Mobile robots are becoming popular and are used for various applications in industries as well as for human assistance, research, entertainment etc.
According to Nikita T. [1] et al. paper evaluates the technology, due to their better and faster mobility in confined spaces, wheeled robots are replacing humanoid robots in increasing numbers. Inverted pendulum technology is used by these wheeled robots for mobility and wheel balancing. In this paper, traditional control theory is applied to robot balancing using a micro controller and the output of a gyroscope sensor.
Paulescu [2] et al. suggested self-balancing cars are an intriguing subject for future transportation technology. The fact that they are lightweight, useful, portable, and simple to use can be an advantage. This article's primary objective is to examine and evaluate a PID classic controller on an experimental two-wheel robot. The primary goal is to keep the position vertical with the least amount of angle deviation. The proposed system uses stepper motors to drive the robot and uses a gyroscope module and accelerometer, respectively, to obtain position and angle velocity.
The goal of the Aditi S. [3] et al. study was to identify new software, technologies, and outcomes that have been applied to advance the field's technological research and improve the navigation method for up- and-coming scholars. Many programming languages, PID, fuzzy logic, and LiDAR technologies were used in its early stages. The paper delves deeply into topics such as image processing and the navigation system via the Bluetooth module.
Ali A [4] et al. outlined the process through which a Two- wheeled Self-Balancing Robot (TWSBR) stability is achieved by a Proportional, Integral, and Differential (PID) controller. Vertical equilibrium is achieved by manually adjusting the PID parameters on an Arduino, an IMU, and geared DC motors. Based on mechanical principles, the robot's mathematical model is verified using real-time responses in MATLAB. The robot's stability via angle feedback and PID control is confirmed by the results. Future research should consider integrating sensors and precisely calibrating two-wheeled robots to achieve efficient self-balancing.
Das A [5] declared that this research provides a model for self-balancing The inverted pendulum, a two-wheeled vehicle that self-adjusts to a vertical position in relation to the ground, serves as the basis for robot operation. It involves using both equipment and programming. It uses a nonexclusive feedback controller (PID controller) to determine its stable inverted position. The core components of the mechanical model are an Arduino micro controller, an IMU (inertial mass unit) sensor, a motor driver, and two DC motors with encoders. The parameters are also referred to as system parameters since they establish the anticipated external force needed to raise the robot. By applying wheel acceleration in line with its tilt from vertical to horizontal, it stayed upright.
This literature review explores self-balancing robots using Arduino, focusing on control systems, sensor integration, and stability mechanisms. Studies reveal the prevalence of PID controllers, accelerometer, and gyroscope sensors. Emphasis is placed on real-time response, manual tuning, and chassis design. This review, which covers key components and control schemes, informs the development of a self-balancing robot project.
IV. METHODOLOGY
- Project Planning and Problem Definition: Clearly define the problem or difficulty that the self-balancing robot is supposed to resolve. Determine the precise goals and objectives of the research based on the problem definition.
- System Design and Component Selection: Design the mechanical framework of the self-balancing robot, taking stability, weight distribution, and size into account. Choose the proper actuators [8] (such as motors or servos) and sensors (such as gyroscopes and accelerometer).
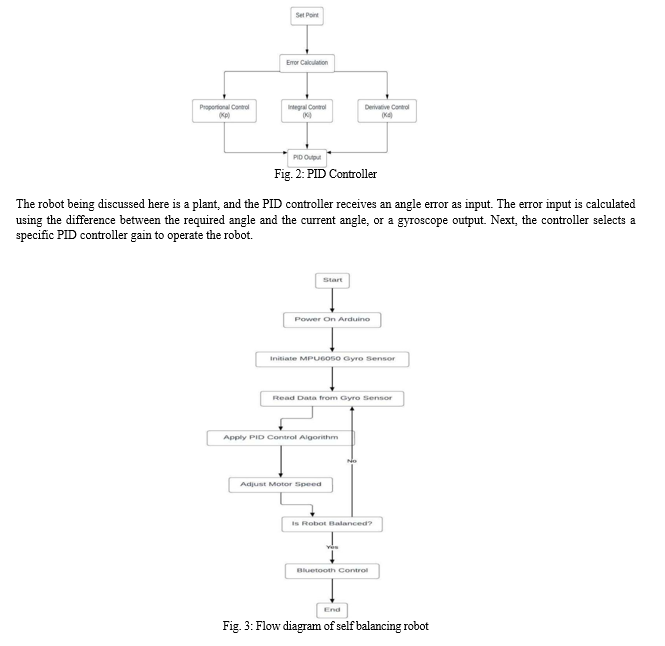
- PID Controller: The component known as a controller works to reduce the variation between a system's actual and desired values. Different controllers are used depending on the application, such as the derivative controller (D), the integral controller (I), the proportional controller (P), or a mix of the three [3]. The combination of all three PID controllers is used for the experiment because it improves controller response speed, eliminates oscillations, quickly adapts to changes in the controller's input and raises the control signal to drive the error towards zero.

References
[1] Nikita, T., and K. T. Prajwal. \"PID controller based two wheeled self balancing robot.\" 2021 5th International Conference on Trends in Electronics and Informatics (ICOEI). IEEE, 2021. [2] Paulescu, Flavius-C?t?lin, et al. \"Two-wheeled self-balancing robot.\" 2021 IEEE 15th International Symposium on Applied Computational Intelligence and Informatics (SACI). IEEE, 2021. [3] Supekar, Aditi, Sharif Nadaf, Shankari Venkatesh, Uddhav Kadam, and B. K. Patle. \"Review on Self-balancing Robot Navigation.\" [4] Ali, A. Taifour, et al. \"Design and Implementation of Two- Wheeled Self-Balancing Robot Using PID Controller.\" 2020 International Conference on Computer, Control, Electrical, and Electronics Engineering (ICCCEEE). IEEE, 2021. [5] Das, A., Rahman, M.M., Adib, A.R. and Anam, M.R., 2021. OBJECT AVOIDING SELF-BALANCING ROBOT WITH PID CONTROLLER USING ULTRASONIC SENSOR. [6] Chien, Shao-Yu, An-Sung Wang, and Ching-Chang Wong. \"Design and implementation of two-wheeled self-balancing vehicle based on load sensors.\" 2020 International Conference on System Science and Engineering (ICSSE). IEEE, 2020. [7] Mwangi, S., 2022. A Hopping Two-Wheeled Segway (Doctoral dissertation, WORCESTER POLYTECHNIC INSTITUTE). [8] Vinothkanna, Mr R. \"Design and analysis of motor control system for wireless automation.\" Journal of Electronics and Informatics 2.3 (2020): 162-167. [9] Smys, Dr S., and Dr G. Ranganathan. \"Robot assisted sensing, control and manufacture in automobile industry.\" Journal of IoT in Social, Mobile, Analytics, and Cloud 1.3 (2019): 180-187. [10] Santoso, S., and S. Yuliananda. \"Design and Control Self Balancing Robot.\" Proceedings of the 1st Asian Conference on Humanities, Industry, and Technology for Society, ACHITS 2019, 30-31 July 2019, Surabaya, Indonesia. 2019. [11] Shekhawat, Anmol Singh, and Yogesh Rohilla. \"Design and control of two-wheeled self-balancing robot using Arduino.\" 2020 International Conference on Smart Electronics and Communication (ICOSEC). IEEE, 2020. [12] URL https://en.wikipedia.org/wiki/Segway.
Copyright
Copyright © 2024 Shreyash Ramteke, Gaurav Ghyar, Sagar Kute, S. K. Gawade. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET63172
Publish Date : 2024-06-07
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online