

Ijraset Journal For Research in Applied Science and Engineering Technology
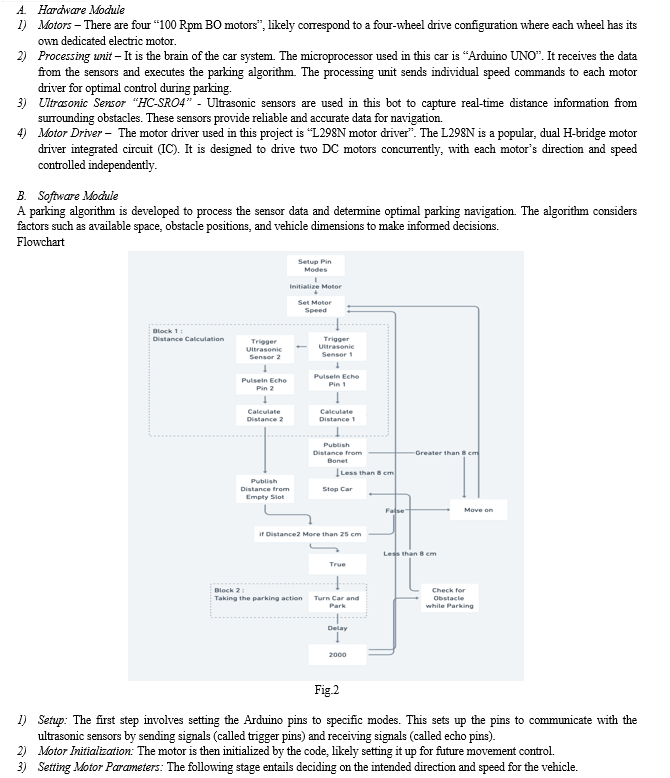
Self Parking Car
Authors: Swaroop Deokar, Somesh Deshmukh, Adityaraje Dhumal, Pushpak Gadhe
DOI Link: https://doi.org/10.22214/ijraset.2024.61751
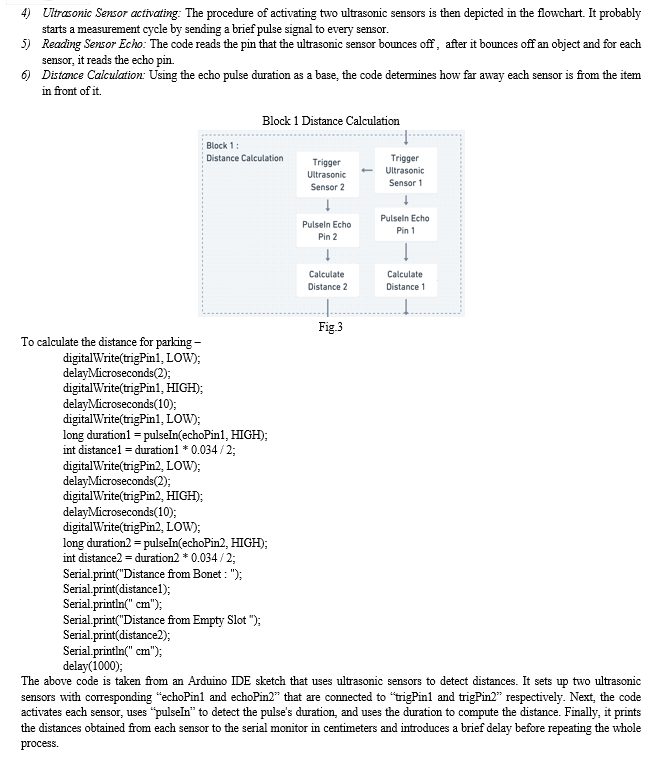
Certificate: View Certificate
Abstract
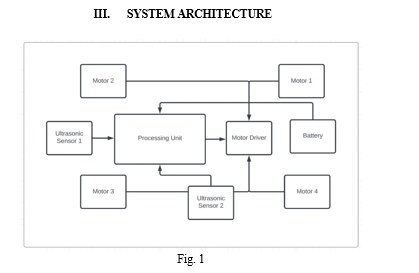
The use of vehicles has increased and results in creating parking issues. This research tackles the pressing need for improved urban parking efficiency and reduced human intervention through the exploration of self-parking cars. In this project, utilizing advanced sensor technologies and refined control strategies, has significantly enhanced accuracy, speed and adaptability in parking procedure, offering sensible solutions to urban challenges like traffic congestion and limited parking accessibility. In our self-parking car project, we use four motors to regulate movement, an Arduino processing unit to make decisions, and two ultrasonic sensors to identify obstacles. The motors allow for accurate vehicle movement, and the processing unit interprets sensor data and controls motor movements. Ultrasonic sensors identify obstacles, allowing the car to drive and park itself. This integration provides safe and efficient self-parking capability. While our work lays a solid foundation, ongoing research is advocated to fully unlock and integrate the transformative potential of self-parking cars into urban environments, addressing contemporary mobility issues. Sure, here\'s a simplified version. Continuously exploring and improving this technology is really important. It helps make sure that self-parking cars become a normal part of how we get around cities, which can change how we plan and move in the future.
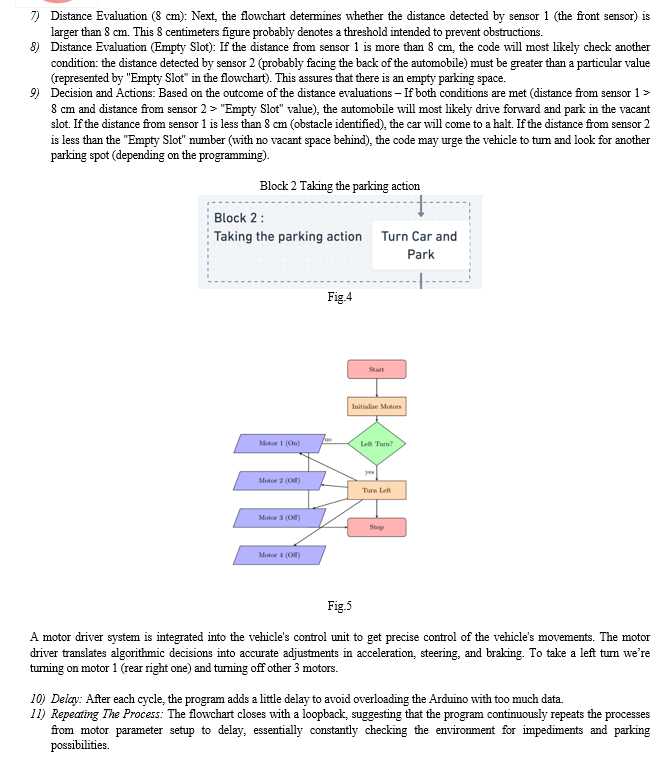
Introduction
I. INTRODUCTION
Due to the increased number of people owning cars, parking is a major problem in many urban areas. This problem is made worse by incorrect estimations of space requirements and poor land use planning. Problems include a lack of parking spots, high parking costs, and delays in traffic brought on by passengers. A driver's greatest concern is parallel parking because it raises the possibility of crashes with other cars and calls for skillful driving. The goal of a self-parking automobile project is to automate parking processes in order to reduce human involvement. The proposal aims to make parking in narrow areas or between two vehicles easier by proposing a module with a circuit that makes it possible cars to parallel park themselves.[1]
In order to accomplish effortless parking, the project replaces human labor in car parking with IoT and mechanical devices. Even if the cost of the current self-parking systems is high, this project intends to provide more accessible solutions that will benefit people. The intention is to lower the cost and increase the accessibility of parking for both developed and developing countries. The self-parking car project automates parking by integrating motor drivers, processing units, and sensors. Sensors monitor the surroundings, collecting information on obstructions and parking space measurements. These data are analyzed by artificial intelligence systems, which then create ideal paths and parking spots. Drivers of cars manipulate the vehicle's motion, modifying its direction, speed, and steering angle as necessary. The system keeps an eye on sensor input to ensure precise placement and avoidance of obstacles. The driver can safely depart the vehicle after the technology breaks down motorized movement, once it has been parked.
II. LITERATURE REVIEW
The first article "Automatic Self-Car Parking Using IoT" discusses the use of sensors, microcontrollers, actuators/motors, wireless communication, and IoT technologies in creating an automated parking system that improves efficiency and convenience for urban drivers. However, the limited detection range of ultrasonic sensors may hinder the identification of obstacles in larger parking spaces. [1]. The next was based on automatic parallel parking system developed by utilizing an Arduino UNO microcontroller and sensors which is “Automatic Parallel Car Parking System using Sensors and Arduino UNO". The system identifies obstructions and performs precise parking operations, providing a hassle-free experience. However, the implementation of LiDAR technology can be costly and complex, limiting its scalability and accessibility [2]. “Advanced Automatic Self Car Parking Using Arduino” research showed that through the integration of sophisticated algorithms with Arduino, how a system is able to recognize parking places, move around obstructions, and park itself precisely. The goal of this project is to improve drivers' convenience and efficiency by offering a smooth, automated parking experience [3].
The study "Method of Automatic Parking of a Car – Theoretical Considerations and Simulation Studies" explores theoretical concepts and simulation experiments for automated vehicle parking. It aims to develop autonomous parking algorithms and assess their effectiveness using simulation tests. Integration challenges include compatibility, regulatory compliance, and coordination with other vehicles and pedestrians. Real-world testing is necessary to address safety concerns and ensure reliable performance [4]. The next paper which we referred was also based on Arduino which was "Ultrasonic Sensor Parking Assistant with Arduino UNO" project uses an Arduino UNO microcontroller and ultrasonic sensors to create a parking help system. This technology helps drivers park by identifying obstructions and giving them immediate feedback via visual or audible cues. The project intends to improve parking accuracy and safety by integrating ultrasonic sensors with Arduino UNO, making parking operations for drivers easier and more effective [5]. A technique for automated parking utilizing LiDAR technology is presented in the paper "Automatic Parking of Self-Driving Car Based on LiDAR". LiDAR sensors make it possible to precisely map the environment around the car, which makes parking and autonomous navigation easier. The suggested solution makes use of LiDAR data to help self-driving cars find parking spots that are acceptable, avoid obstructions, and park safely and accurately [6]. An automatic car parking system using Arduino microcontrollers is implemented. The system uses Arduino to integrate sensors and actuators to identify impediments and steer the car into a parking spot on its own. With the use of Arduino technology, this project seeks to streamline parking procedures, improve driver convenience, and show that automated parking systems are feasible [7]. The goal of “Automatic Parking Vehicle System" at is to create a complete automated parking system. In order to allow cars to drive themselves and park in approved spots, this system probably combines actuators, sensors, and sophisticated algorithms. The project intends to maximize space use, expedite parking procedures, and improve motorist convenience and efficiency by utilizing cutting-edge technologies [8]. The study most likely examines the performance of two types of sensors, infrared (IR) and ultrasonic, for detecting obstacles of various materials in vehicle/robot navigation applications. As a result, this study's technologies include infrared and ultrasonic sensors. Because of their ability to estimate distance through signal emission and reception, these sensors are widely used for proximity sensing and obstacle identification in a variety of applications [9]. The article most likely explores technologies for autonomous parallel parking for cars. Sensors such as ultrasonic, cameras, and radar are commonly used in such systems to identify obstacles, as well as sophisticated control algorithms to safely and accurately drive the vehicle into parking spaces. Furthermore, advances in machine learning and artificial intelligence may improve the system's ability to identify parking spaces and optimize parking maneuvers [10].
The literature on urban parking has grown significantly, with self-parking automobile technology being a potential game-changer. However, there is a significant gap in the thorough examination and incorporation of cutting-edge sensor technology. This literature review acknowledges the achievements and limitations of current systems, emphasizing the complexity of algorithmic frameworks. Further study is needed to understand the potential of self-parking technology to transform urban transportation and evaluate its existing condition. A research project aims to analyze current self-parking algorithms, incorporate cutting-edge sensor technologies, and assess their performance in real-world scenarios.
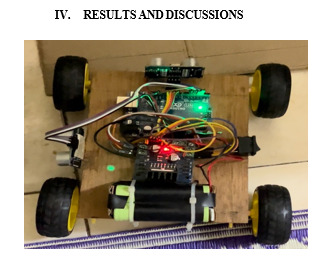
In the results and discussion section of the research paper, we delve into the innovative self-parking capabilities of a miniature car prototype, measuring just 12 cm in length and equipped with two ultrasonic sensors. The left ultrasonic sensor serves as a crucial component, tasked with detecting parking spaces exceeding the car's length threshold of 12 cm. Upon identifying a suitable spot, the car initiates a turning maneuver, leveraging its four-wheel-drive system to shift leftward. This maneuver is facilitated by the forward movement of the right front and back wheels, enabling the car to smoothly navigate into the parking space. As the car advances forward, the front ultrasonic sensor diligently monitors the distance between the car and any potential obstacles, such as a wall-like surface. Specifically set to trigger at a distance of 3 cm, the front ultrasonic sensor ensures the car halts promptly upon nearing an obstacle, thereby preventing collisions and ensuring safe parking. This comprehensive system, implemented in a prototype form, demonstrates the feasibility and potential of autonomous parking technology, offering a glimpse into its transformative impact on urban driving experiences.
Conclusion
The efficiency, accuracy, and safety of the algorithm are assessed as this study investigates the possibilities of self-parking automobile technology in urban transportation and parking experiences. Findings show that parking precision has significantly improved, relieving driver stress and increasing productivity. Positive user feedback supports autonomous parking systems\' perceived safety and user-centric design. Innovations in artificial intelligence, sensor technology, and smart city infrastructure integration bode well for the future. Nonetheless, issues with public trust, standardization, and regulatory frameworks continue to exist. Subsequent investigations have to concentrate on augmenting the resilience of self-parking systems in challenging circumstances, like inclement weather or dimly lit surroundings, through the efficient modification of algorithms and sensor technologies. This study adds to the body of knowledge by highlighting the revolutionary potential of self-parking technology to improve urban parking, ease traffic, and boost transportation effectiveness. It also lays the groundwork for resolving issues under unfavourable circumstances.
References
[1] “Automatic Self- Car Parking Using IoT” by Rahul Scanda Vadde, Sayooj Dinan and N. Krishnaraj. [2] “Automatic Parallel Car Parking System using Sensors and Arduino UNO” by Soma Ram Ganesh, V.Sai Ganesh, Mir Farazuddin Hamza, Sahil Ramwal , Siddhartha Ghosh, 2019. [3] Katkar Kalyani S., Miss. Patil Nikita V., Miss.Kale Puja D., Miss. Ghule Pooja R, Prof. Pawar Monal D.,\" ADVANCED AUTOMATIC SELF CAR PARKING USING ARDUINO 1628083488\",2021 [4] Method of Automatic Parking of a Car – Theoretical Considerations and Simulation Studies by Maciej Trojnacki,2019. [5] “ULTRASONIC SENSOR PARKING ASSISTANT WITH ARDUINO UNO” by Supriyono and Marjuki,2020. [6] Bijun Lee, Yang Weia, Yuan Guo, “AUTOMATIC PARKING OF SELF-DRIVING CAR BASED ON LIDAR\",2017 [7] Nihal Deochand Chaudhari, Ayushi Singh,\"Automatic Car Parking System Using Arduino\",2020 [8] Dr. Gene Yeau-Jian Liao,Dr. Chih-Ping Yeh, Dr. Jimmy Ching-Ming Chen,\"Automatic-parking-vehicle-system\",2016 [9] Adarsh S1, Mohamed Kaleemuddin S1, Dinesh Bose1, K I Ramachandran2 S Adarsh et al 2016 IOP Conf. Ser.: Mater. Sci. Eng. 149 012141, Performance comparison of Infrared and Ultrasonic sensors for obstacles of different materials in vehicle/robot navigation applications, ICon AMMA 2016, Pp – 7 [10] Claire Chen, The Menlo Roundtable, Autonomous Parallel Parking Car, 2015 [11] Dhiraj Thote, Harsha Tembhekar, Ankit Bharambe, Ankit Bansod,Mayur Meshram, Prajit Meshram, Automatic Self-ParkingChair, International Research Journal of Engineering and Technology(IRJET) Volume: 05 Issue: 03 Mar-2018 [12] Maksura Mubashirin, Srabosti Mahmud, Automated Car ParkingSystem [13] Ray_Shine Run 1, Jui-Cheng Yen 2, and Chihhsuan Chen, A Study ofAutomatic Parallel Parking System - from the Viewpoints of User andManufacturer, July – 2011Roberto Cabrera-Cósetl, Miguel Zeus Mora-Álvarez, RubénAlejos-Palomares, Self-Parking System Based in a Fuzzy LogicApproach, 2009 International Conference on Electrical,Communications, and Computers [14] Shidian Ma, Haobin Jiang, Mu Ha, Ju Xie, Chenxu Li, Research onAutomatic Parking Systems Based on Parking Scene Recognition,Published October 18, 2017 [15] Suvarna Nandyal, Ph.D., Sabiya Sultana, Sadaf Anjum, Smart CarParking System using Arduino UNO, International Journal ofComputer Applications (0975 – 8887)Volume169 – No.1,July2017 [16] Tom Airaksinen, Hedvig Aminoff, Erik Byström, Gustav Eimar, Iracema Mata, David Schmidt Cognitive Science Program, Universityof Linköping, June 2004, Automatic Parallel Parking Assistance System User [17] Research on Automatic Parking Systems Based on Parking Scene Recognition”, date of publication October 18, 2017. [18] Research on Automatic Parking Systems Based on Parking Scene Recognition”, date of publication October 18, 2017. [19] Self Parking car prototype”, Conference Paper · September 2018 DOI: 10.1109/ICACCI.2018.8554543 [20] 2014InternationalConferenceonComputerCommunicationandInformatics(ICCCI-2014),Jan.03–05,2014,Coimbatore,india.“automatedcarparkingsystem [21] commanded by android application [22] ISSN:2278–7798International Journal of Science, EngineeringandTechnologyResearch(IJSETR)Volume2,Issue4,January2013“AutonomousSelfParking [23] and Self Retrieving Vehicle With GPS Less Keyfob for Vehicle Tracking” [24] Li, T. H. S. and Chang, S. J. “Autonomous Fuzzy Parking Control of a Car-Like Mobile Robot.” IEEE [25] Transactions on Systems, July 451-465, 2003. [26] I. E. Paromtchik, and C. Laugier, \"Motion Generation and Control for Parking an Autonomous Vehicle, \" Proc. of the IEEE Int. Conf. on Robotics and Automation, Minneapolis, USA, (April 22-28, 1996), pp. 3117-3122 [27] Lyon, D., “Parallel parking with curvature and nonholonomic constraints.” Proceedings of the Intelligent Vehicles \'92 Symposium, Jul. 341-346, 1992. [28] Wang, J.M., Wu, S.T., Ke, C.W., and Tzeng, B.K., “Parking Path Programming Strategy for Automatic Parking System.” Vehicle Engineering (VE) Volume 1 Issue 3, September 2013 [29] M. S. Brandon Schoettle, \"A SURVEY OF PUBLIC OPINION ABOUT AUTONOMOUS AND SELF-DRIVING VEHICLES IN U,S, U.K., AUSTRALIA,\" 2014. [30] S. M. M. T. Mike Daily, \"Self-Driving Cars,\" 2017. [31] A. S. I. R. Jean-Francois Bonnefon, \"The social dilemma of autonomous vehicles,\" 2015. [32] U. o. M. Centre for Sustainable Systems, \"Autonomous Vehicles Factsheets,\" 2018 [33] N. Corporation, \"End to End Learning of Self-Driving Cars,\" 2016. [34] Chaocheng Li, Jun Wang, Xiaonian Wang, and Yihuan Zhang. A model based path planning algorithm for self-driving cars in dynamic environment. pages 1123–1128, 11 2015. [35] Syed Ali Chishti, Sana Riaz, Muhammad Zaib, and Mohammad Nauman. Self-driving cars using cnn and q-learning. pages 1–7, 11 2018 [36] Qudsia Memon, Muzamil Ahmed, Shahzeb Ali, Azam Ra?que, and Wajiha Shah. Self-driving and driver relaxing vehicle. 11 2016. [37] Akash Undale , Shruti Mendgule , Nisha Metkari , Darshana Savairam , Prof. J. P. Kharat, \"Self Parking Vehicle\",2020
Copyright
Copyright © 2024 Swaroop Deokar, Somesh Deshmukh, Adityaraje Dhumal, Pushpak Gadhe. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61751
Publish Date : 2024-05-07
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online