

Ijraset Journal For Research in Applied Science and Engineering Technology
Smart Agrobot: An Integrated Approach to Seed Sowing, Pesticide Application
Authors: Prof. Dnyaneshwar Kanade, Chandrashekhar Chandekar, Atharva Chaudhari, Soham Chavan, Ankita Dhage, Akhilesh Mane
DOI Link: https://doi.org/10.22214/ijraset.2024.61018
Certificate: View Certificate
Abstract
A state-of-the-art multifunctional autonomous agricultural robotic vehicle intended to transform farming methods is presented by the suggested system. This robotic vehicle is mostly operated via Bluetooth, but it also has sophisticated navigation features like GPS and object detection sensors, which allow it to navigate precisely and cautiously over fields of crops. The autonomous irrigation system with soil sensors and intelligent seeding mechanisms for different crops are just two of the robotic vehicle\'s many features that make it stand out. Farmers have freedom thanks to the Bluetooth control capability, which enables remote operation and monitoring. Safety features protect workers\' health and prevent equipment damage, such as emergency stop buttons and collision avoidance procedures. This robotic system also performs exceptionally well in drip irrigation management in places that receive rain, optimizing fertilizing depending on soil conditions, and controlling weeds using computer vision. The suggested method, which reduces human intervention and increases total production, is a comprehensive and intelligent approach to automated and sustainable agriculture with an emphasis on energy conservation, data logging, and analytics.
Introduction
I. INTRODUCTION
Agriculture is changing quickly in the modern era because of things like changing trade rules and the world population growth, which affect the cost, distribution, and supply chain of food goods. At the same time, consumer tastes are moving towards organic and sustainably grown fruits and vegetables, especially in Western nations, which calls for more workers. Remarkably, agricultural pursuits employ almost 53% of India's population.
The agriculture sector is facing difficulties such as a lack of workers and rising labour costs as it tries to meet the ever-increasing and ever-changing demands. Modernizing agricultural operations has resulted from the deployment of automation as a solution to this problem. This method's main goal is to decrease the need for manual labour by introducing automation at different phases. introducing automation at several crop-cultivation stages.
An autonomous vehicle has been designed and controlled to perform duties including planting, mowing, and ploughing. Remote vehicle control is made possible by the combination of sophisticated communication technology and smart sensors. Additionally, in order to reduce water waste, an irrigation system has been created that uses soil moisture levels and weather forecasts to identify the best times to water.
A crucial aspect of this modernization endeavour is the development of a system to forecast weather patterns and identify crops that are appropriate for particular seasons. The study includes the development of a seeding prototype that enables the vehicle to move in all directions using a DC motor driven by an H-bridge. The farmer can remotely control the motor by using Bluetooth connectivity and an app on his smartphone..
II. LITERATURE SURVEY
The productivity of agriculture is steadily rising due to advancements in automation. Crop monitoring, shortage of water resources, rising input costs, and the availability of qualified labor are some of the main issues facing Indian agriculture. Robotic automation technologies were applied to agriculture to address these issues. The use of automation in agriculture may allow farmers to work less. The robot that carries out tasks like assessing the moisture content of the soil, planting, dousing herbicides, clearing compost from the field, and detecting metal objects in its path.The paper likely provides a comprehensive review of autonomous agricultural robots for smart farming, focusing on their applications, technologies, and advancements. It may discuss the impact of such robots on modern agriculture, addressing efficiency, sustainability, and the overall improvement of farming practices.[1]The paper from 2011 likely introduces the concept of a multipurpose agricultural robot and explores its various functionalities.
It may cover aspects such as crop monitoring, soil analysis, and potentially address challenges and advancements in the field of agricultural robotics.[2]The paper seems to focus on a specific application of agricultural robotics, specifically aiding in mango cutting. It likely discusses the design, implementation, and performance of a robot tailored for this agricultural task.[3] investigating the use of wireless sensor networks based on Zigbee for monitoring and controlling irrigation water. It might go over the advantages, effectiveness, and applications of applying this technology to farming methods.[4]Appearing to focus on a specific agricultural rover designed for self-guided digging and seed sowing. It likely covers the design principles, command-based operation, and potential advantages of such a system.[5]
Delving into the design and implementation aspects of an agricultural robot specialized in seeding and fertilizing. It may discuss the technical details, performance, and implications for precision agriculture.[6] concentrating on a robotic farming vehicle that uses Dual-Tone Multi-Frequency (DTMF) signals for control. It probably goes over the control method, system architecture, and possible uses in intelligent farming.[7]
Exploring the design and operation of an integrated agrobot system using Wi-Fi connectivity. It may discuss the advantages of such integration, its performance, and potential applications in modern agriculture.[8]
III. SYSTEM ARCHITECTURE
A. Software Component
- Arduino IDE
B. Hardware Component
- Servo motor
- DC BO motors
- Water pump
- Battery
- Wheels
- Chassis
- Jumper wire
- Bluetooth Module
Software Component:
- Arduino IDE
Description: The software program known as Arduino Integrated Development Environment (IDE) is used to program and upload code to Arduino microcontrollers. It offers an intuitive graphical user interface for creating, assembling, and uploading code to the Arduino platform.
Hardware Components:
2. Servo Motor
Description: An actuator that rotates and provides accurate angular position control is called a servo motor. It is frequently used to regulate the motion of different mechanical parts in robotics and automation..
3. DC BO Motors
Description: DC (Direct Current) BO (Geared) Motors are commonly used in robotics and electronic projects. The geared mechanism provides torque, making them suitable for applications like moving robots or vehicles.
4. Water Pump
Description: A water pump is a device designed to move water from one place to another. It is commonly used in projects such as automated irrigation systems or other applications requiring fluid movement.
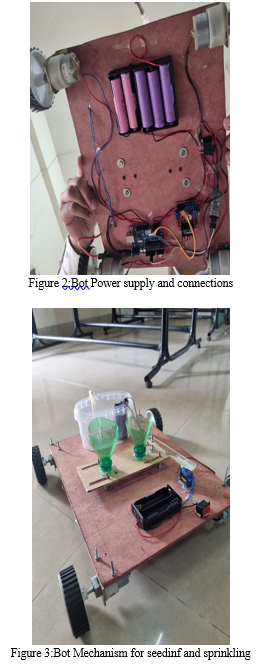
5. Battery
Description: Electronic equipment are powered by batteries, which both store and produce electrical energy. The project's power requirements determine which battery is best. Rechargeable lithium-ion batteries and non-rechargeable alkaline batteries are common varieties.
6. Wheels
Description: Wheels are essential components for vehicles and robots, providing mobility. They come in various sizes and materials, and the selection depends on the specific requirements of the project.
7. Chassis
Description: The chassis is the framework or structure that holds and supports all other components. It provides the basic structure for building a robot or a device, ensuring stability and allowing for the attachment of other components.
8. Jumper Wire
Description: Jumper wires are short wires with connectors at each end used to make electrical connections on a breadboard or between components. They are essential for creating the electrical connections needed for a circuit.
IV. METHODOLOGY
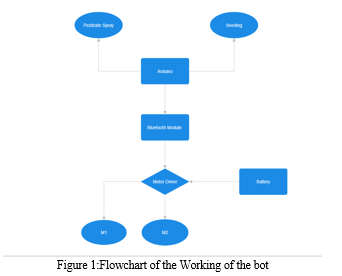
In this paper, the multitasking vehicle system is also referred to as the farming robot. The Arduino Uno microcontroller is the one we utilize to regulate the many functions of the suggested system. The microcontroller's Ports 1 and 2 and the motor drivers are used to carry out tasks including crop cutting, pesticide spraying, and sowing. Here, the DC motor activities are managed by the motor driver. The vehicle is driven by DC motor operations. the goal with the sliding mechanism's assistance. Pesticide is sprayed here using a water pump, and crop cutting is done with a blade attached to a DC motor that is controlled by a microcontroller. Additionally, a Bluetooth module that is connected to a mobile app is used to manage a farming truck overall.
A. Seed Sower
In this section, we design and build a completely automated seed sower that turns on when the user taps the app's "seed sower" button.The mechanism attached to it can move back and forth thanks to a shaft that is connected to the motor.It permits the opening and closing of seed-sowing points.
B. Pesticide Spraying
Weed killers and chemicals are kept in containers. Weed and pesticides are pumped and sprayed using a pump.
V. RESULTS AND DISCUSSIONS
A. Results
- This fully automated robot minimizes the need for human labor by performing a lot of work in farms. Its rapid activity will result in time savings.
- Agrobot is capable of operating in any kind of environment. The robots are able to operate error-free and constantly..
- Defense against the negative effects of substances.
- Can also be used in green house farming.
B. Discussion
An important development in agriculture technology is a smart agrobot that may be used for seeding and sprinkling crops. It brings automation, accuracy, and efficiency to conventional farming methods. This innovative solution integrates robotics and smart technologies to enhance agricultural practices. Here's a discussion on the key aspects of this smart agrobot:
- Precision Agriculture: The agrobot leverages sensors, cameras, and GPS technology to navigate and operate with precision. It can accurately identify suitable areas for seeding and determine the optimal locations for sprinkling water, ensuring efficient resource utilization.
- Seeding Efficiency: The agrobot is equipped with a precision seeding mechanism that can handle various types of seeds. It follows predetermined patterns or adjusts its course based on real-time data, ensuring uniform seed distribution across the field. This level of precision leads to improved crop yields and resource management.
- Automated Sprinkling System: The sprinkling functionality is designed to optimize water usage. The agrobot can assess soil moisture levels using sensors and make data-driven decisions on when and where to sprinkle water. This automated system minimizes water wastage and promotes sustainable irrigation practices.
- Real-time Monitoring and Control: Farmers can monitor and control the agrobot remotely through a user-friendly interface, often accessible via a mobile app or computer. Real-time data on seeding progress, soil conditions, and water usage allow for prompt decision-making, ultimately contributing to better crop management.
- Adaptability to Field Conditions: The agrobot is engineered to adapt to various terrains and field conditions. Its mobility is enhanced through robust wheels or tracks, allowing it to navigate through uneven surfaces with ease. This adaptability ensures that the agrobot can effectively operate in diverse agricultural landscapes.
- Data Analytics for Decision Support: The smart agrobot generates and analyzes a wealth of data, providing valuable insights into soil health, crop growth, and environmental conditions. Farmers can use this data to make informed decisions, such as adjusting seeding rates, optimizing irrigation schedules, and implementing targeted interventions for crop health.
- Environmental and Economic Benefits: By optimizing seed distribution and water usage, the smart agrobot contributes to environmental sustainability. It minimizes the environmental impact associated with excessive water consumption and promotes the efficient use of resources. Additionally, increased productivity can have positive economic implications for farmers.
- Challenges and Considerations: Despite the potential advantages, challenges such as initial costs, maintenance, and the need for continuous technological updates should be considered. Farmers may also need training to effectively integrate and manage these sophisticated systems into their existing farming practices.
VI. ACKNOWLEDGMENT
Prof. Dnyaneshwar Kanade, who served as our project mentor, has our profound gratitude for his significant contributions to this paper and Project. Finally, we would like to express our gratitude to our friends and family for their assistance throughout the project.
Conclusion
A revolutionary step toward increased sustainability and efficiency is being taken in agriculture with the integration of robotics and the Internet of Things (IoT). Equipped with sensors, these agricultural robots not only improve resource management by offering up-to-date information on crop status, weather trends, and soil health, but they also significantly save labor costs. IoT and robotics work together to create a potent synergy that has the potential to transform farming methods and provide answers to sustainability and food security problems. These robots optimize resource use and boost yields by streamlining agricultural processes by automating tasks like spraying, sowing seeds, and cutting crops. The network\'s interconnection makes communication easy and allows farmers to act quickly with well-informed judgments.
References
[1] Ashish Lalwani, mrunmai Bhide, S. K. Shah, A Review: Autonomous Agribot For Smart Farming, 46th IRF International Conference, 2015 [2] Akhila Gollakota, M.B.Srinivas, Agribot-A multipurpose agricultural robot, India Conference (INDICON), IEEE, 2011. [3] Sandeep Konam, “Agricultural Aid for Mango cutting (AAM),” Electronics & Communication Engineering, RGUKT, R.K. Valley Kadapa, India, 978-1-4799-3080-7 IEEE 2014. [4] Rasin, Z., H. Hamzah and M.S.M. Aras, 2009. Application and evaluation of high power Zigbee based wireless sensor network in water irrigation control monitoring system. Proceedings of the IEEE Symposium on Industrial Electronics and Applications, Volume, 2, October 4-6, 2009, Kuala Lumpur, Malaysia, pp: 548-551. [5] M. priyadarshini, Mrs. L. Sheela, “Command based self guided digging and seed sowing rover”,International Conference on Engineering Trends and Science & Humanities, ISSN: 2348 – 8379, ICETSH-2015. [6] Shivaprasad B. S., Ravishankara M. N.,B. N. Shoba, “Design and implementation of seeding and fertilizing agriculture robot”, International Journal of Application or Innovation in Engineering & Management (IJAIEM), Volume 3, Issue 6, June 2014. [7] Amritanshu Srivastava, Shubham Vijay, Alka Negi, Akash Singh, “DTMF Based Intelligent Farming Robotic Vehicle,” International Conference on Embedded Systems (ICES ), IEEE 2014. [8] Gulam Amer, S.M.M. Mudassir, M.A. Malik, “Design and operation of Wi-Fi Agribot Integrated system”, International Conference on Industrial Instrumentation and control (ICIC), IEEE, 2015. [9] Bhargav Narayanavaram, E. Manoj Kumar Reddy & Rashmi M. R. “Arduino based Automation of Agriculture A Step towards Modernization of Agriculture”
Copyright
Copyright © 2024 Prof. Dnyaneshwar Kanade, Chandrashekhar Chandekar, Atharva Chaudhari, Soham Chavan, Ankita Dhage, Akhilesh Mane. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61018
Publish Date : 2024-04-25
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online