

Ijraset Journal For Research in Applied Science and Engineering Technology
Solar Powered QuadCopter Drone
Authors: Dr. Vivek Sharma, Vishal Verma, Vishal Chaudhary, Devendra Kerwal, Yuvraj Pandit
DOI Link: https://doi.org/10.22214/ijraset.2024.60820
Certificate: View Certificate
Abstract
Drones are a common sight today and are being used in a wide range of applications. From selfies to pesticide spraying to military surveillance. Well the problem with surveillance monitoring is that many applications require long time surveillance. Drones do provide a good view for surveillance monitoring but have a huge drawback. This is the drone battery life. The major fear a drone pilot faces in surveillance is that the battery may run out and drone may land on a tree or building or some inaccessible area from where it cannot be retrieved and thus cannot be charged. This is also the case in military surveillance, the possibility of battery life running out and drone being inaccessible creates limitations for drone pilots during surveillance/monitoring. Well we here develop a drone with solution to these problems using solar power to constantly charge the drone to increase its flight time as well as the ability to land the drone anywhere and automatically its battery remotely to take flight later. This will lead to improved flight time as well as automatic battery charging of drones in inaccessible areas so that it can take off from the same spot on charging. The drone is a quad rotor drone that makes use of 4 x high powered drone motors with propellers to provide required lift to the drone. The drone body is integrated with solar panels for high efficiency charging during idle time as well as during flight time for improved flight times. The drone is integrated with a wifi camera that can be monitored over an android smart phone using wifi connection. It makes use of a rc remote controller to receive control commands for the user. The drone onboard rc receiver is used to receive control commands from the user and operate drone motors to achieve desired flight.
Introduction
I. INTRODUCTION
As the demand for commercial deliveries increase within the cities, company face a fundamental limitation in surface road capacity. Drone delivery aims to overcome that limitation by exploiting the vertical dimension above the street. This study looks into how the delivery drones are designed, including how well they fly, how much energy they use, how loud they make, and how safe they are—all factors that are essential to the success of the delivery drones. Importantly, key design constraint and expected performance level also speak to the potential scalability of the concept. This drone can be used for a variety of tasks, such as distributing food, medical supplies, immunizations, shooting wedding and pre-wedding party photos, etc. A common drone charges completely in 60to 90 minutes when using a USB connector, however it charges faster when placed in a charging hub. Speaking of the flight period, a typical drone can fly for 15 to 20 minutes after being fully charged. However, this is too early and we couldn't do as much during this time, so as a backup, we need something that can be used in emergency situations. We suggest a solar-powered self-charging drone that can recharge the battery using the sun's natural light and store the energy for later use in order to address the problem of early battery draining. The flight time won't be prolonged further, and natural resources will also be used. which is excellent step towards green environment theory. Drones are also referred to as UAVs and are managed by remote-controlled computer systems. Because batteries and conventional fuel have limited energy and are expensive, the main issues with standard UAVs are flying time and endurance. Solar energy can be used to alleviate this issue with solar cells, extending flight time without enlarging the battery or fuel system. Because it performs well at lower speeds because less Reynolds numbers were chosen, the sailplane aero foil is known as WE3.55/9.3
II. METHODOLOGY
A. Problem Statement
For the past century, drones have become a piece of technology that has had a pervasive impact on our society whether it be for military, industrial, scientific, commercial, or recreational uses. The major fear of pilot faces in surveillance is that the battery may run out and drones may land on tree or building or some inaccessible area from where it cannot be retrieved and this cannot be charged. This is also the case in military surveillance, the possibility of battery life running out and drone being inaccessible creates limitation for drone pilots during surveillance/monitoring.
???????B. Proposed System
The angular momentum of any of the four rotors generates a torque about the inertial center of mass of the vehicle whichcanbeeffectivelycounterbalancedbythetorquecreatedfromtheopposingrotor.AsolardroneisanUnmanned Aerial Vehicle (UAVs) that is powered by solar energy. It relies on photovoltaic cells to captures solar energy and convert it into electricity, which is used to power the drone’s motors and other system.
Themethodologyforbuildingthesolardronestypicallyinvolvesthefollowingsteps:
- Design: The first step in building a solar drone is to design the drone’s structure, including its wings, body,and propulsion system. The design must take into account the weight of the solar cells, battery, and components, as well as the drone’s intended use and environmental conditions.
- Solar Cells Selections: The selection of solar cells is critical step in building a solar drone. The cells must be efficient enough to generate sufficient power to keep the drone in flight, while also being lightweight and durable.
- Integration: Once the solar cells have been selected, they must be integrated into the drone’s structure in a way that maximizes their exposure to sunlight. This involves carefully positioning the cells on the wings and body of the drone and connection them to the drone’s electrical system.
- Battery Selection: Solar drone also requires a battery to store the energy generated by the solar cells. The battery must be lightweight, durable and able to provide enough power to keep the drone in flight for an extended period.
- Testing: Once the drone has been assembled, it must be tested to ensure that it can fly for reasonable amount of time and perform it’s intended function, this involves testing the drone in various weather conditions and making any necessary adjustments to it’s design.
- Deployment: Finally, the solar drone can be deployed for it’s intended use, which may include environmental monitoring, surveillance, or other applications.
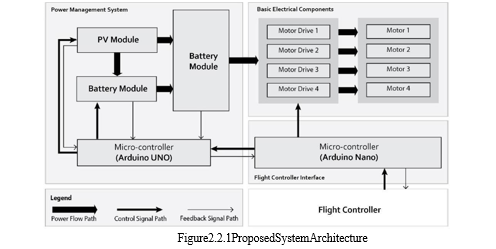
???????C. Power Management System
The power management system refers to the puissance control unit where the potency is stored from the solar plates in the battery. As mentioned in fig. 2.2.1 PV module is a semiconductor material commonly kens as solar panels a web that magnetizes the solar power and transforms it into use able energy. The battery will be utilized as a puissance storage module for further use. All the modules of the puissance control system will be directly connected to the microcontroller (Arduino UNO), which will perpetually pass the signal to other electrical components as well assensors implemented in the drone.
???????D. Electrical Components
This section contains 4 motor drivers who are responsible for drone flying, from the battery they will get a potency supply and will work on the injunctive authorizations of microcontrollers and the flight control unit from the ground, which has Arduino nano as its system control unit.

 ???????
???????
Conclusion
The addition of solar power to UAVs has the potential to expand the range of applications for these aircraft by increasing their flight time. The main goal of this project is to equip the RC glider with a solar power system in order to increase its flight time. In the end, the flight test proved that the project\'s goal had been accomplished. The installation of the solar power system on the aero plane results in a 22.5% reduction in the use of battery stored capacity under good experimental settings with suitable weather (solar radiation level exceeding 700 W/m2). The rate of battery voltage declines for the solar-powered UAV(\'Sun\') is substantially faster when compared to the battery voltage graphs during circuiting.
References
[1] Hayajneh, M., & Badawi, A.R. (2019). “Automatic UAV Wireless Charging over Solar Vehicle to Enable Frequent Flight Missions”, Proceedings of the 2019 3rd International Conference on Automation, Controland Robots. [2] K. S. Rahman, Md. Rokonuzzaman, G. B. Xue, R. I. Thakur, K. M. Kabir, M. A. Matin, S. K. Tiong, N.Amin (2019), “A Light Weight Solar Powered Mini Quadcopter for Environmental Monitoring”, International Journal of Engineering and Advanced Technology (IJEAT) ISSN: 2249-8958 (Online), Volume-9 Issue-2, December, 2019 [3] S Sivachandran, Vasanth kumar R, Prakashraj K.M, Zubair M.,”Security Surveillance Drone”, International Journal Of Innovative Research In Technology, Volume 7 Issue 10 | ISSN: 2349-6002 [4] H Ali, LYHang,T YSuan, VR Polaiah,MI F Aluwi, AAMohd ZabidiandMElshaikh, “Developmentof surveillance drone-based internet of things (IoT) for industrial security applications”, J. Phys.: Conf. Ser. 2107 012018 [5] Aurello Patrik, Gaudi Utama, Alexander Agung Santoso Gunawan, Andry Chowanda, Jarot S. Suroso,Rizatus Shofiyanti and Widodo Budiharto, “GNSS-based navigation systems of autonomous drone for delivering items”, (2019) 6:53 https://doi.org/10.1186/s40537 019 0214 3 [6] GNSS-based navigation systems of autonomous drone for delivering items, “Using Unmanned AerialVehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Civil Security and Public Safety”, Journal of Big Data 6(1) DOI:10.1186/s40537-019-0214-3 [7] Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Stastny, T.; Wawrzacz, B.; Hinzmann, T.; Leutenegger, S.; Alexis, K.; Siegwart, R. Design of small hand-launched solar-powered UAVs: From concept study to amulti- dayworld endurance record flight. J. Field Robot. 2017, 34, 1352–1377. [Google Scholar] [8] Morton,S.; D’Sa,R.; Papanikolopoulos, N.SolarPoweredUAV:Design and Experiments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany,28 September–3 October 2015. [Google Scholar] [9] Safyanu, B.; Abdullah, M.; Omar, Z. Review of Power Device for Solar-Powered Aircraft Applications. J. Aerosp. Technol. Manag. 2019, 11, 4119. [Google Scholar] [10] Green, M.A.; Dunlop, E.D.; Levi, D.H.; Hohl-Ebinger, J.; Yoshita, M.; Ho-Baillie, A.W.Y. Solar cell efficiency tables (version 54). Prog. Photovolt. Res. Appl. 2019, 27, 565–575. [Google Scholar]
Copyright
Copyright © 2024 Dr. Vivek Sharma, Vishal Verma, Vishal Chaudhary, Devendra Kerwal, Yuvraj Pandit. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60820
Publish Date : 2024-04-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online