

Ijraset Journal For Research in Applied Science and Engineering Technology
Stair Climbing Electric Wheelchair
Authors: Adwaith Sahadevan, Mohamed Shaddad, Pranav Anil, Shalu K M
DOI Link: https://doi.org/10.22214/ijraset.2024.64104
Certificate: View Certificate
Abstract
From 18 century many types of wheelchairs had been designed, by developing its functionality. Our project focuses on addressing the mobility challenges faced by individuals with disabilities, particularly those who encounter difficulties navigating staircases. The project introduces a novel solution in the form of an electric stair- climbing wheelchair designed to provide enhanced accessibility in both indoor and outdoor environments. The wheelchair incorporates innovative technologies, including electric motors and intelligent control systems, to enable seamless and safe navigation on various types of stairs. The important parts of this product are conveyor belt, frame and driving mechanism climbing wheelchair for regular use by old disabled people. The design of frame will be done by considering various loads, stresses at various positions. The main factor of wheelchair are the angle of stair and center of gravity of whole system. The design process involves considerations for user comfort, safety, and ease of operation, with a particular emphasis on accommodating diverse user needs. Through a combination of both electrical and mechanical engineering principles and modern electronics, the wheelchair is equipped to ascend and descend stairs smoothly, offering a versatile solution for individuals with mobility impairments. We also plan to explore user feedback and ergonomic evaluations to refine the wheelchair\'s design and functionality. Preliminary testing would be done to demonstrates the feasibility and effectiveness of the proposed solution in real-world scenarios. The findings of this study contribute to the ongoing efforts to improve the quality of life for individuals with disabilities by expanding their mobility options and promoting inclusivity in various environments.
Introduction
I. INTRODUCTION
Since their inception in the 18th century, wheelchairs have been crucial for enhancing mobility and independence for individuals with disabilities. This project aims to advance wheelchair technology by developing an ergonomically designed wheelchair with a stair-climbing feature, tailored specifically for elderly and disabled users. The project's primary goal is to create a wheelchair with a redesigned frame, conveyor belt, and climbing mechanism, all aimed at improving user-friendliness and versatility. The design and fabrication focus on several critical aspects: a strong, lightweight, and durable frame; a stair-climbing mechanism engineered for smooth and secure operation; a well-designed conveyor belt to ensure stability during climbing; and careful attention to the center of gravity for optimal stability and control on stairs. The significance of this project lies in its potential to address the unique challenges faced by individuals with mobility impairments, representing a major advancement in assistive technology. By improving mobility, enhancing independence, and ensuring safety and convenience, this project contributes to greater accessibility and inclusivity. Ultimately, this innovation not only promises to improve the daily lives of its users but also highlights the broader societal impact of technological advancements in fostering a more inclusive environment. The electric stair-climbing wheelchair stands as a testament to the dedication and ingenuity of its developers, offering a transformative solution for many individuals.
II. LITERATURE REVIEW
The development of stair-climbing wheelchairs has garnered significant attention from researchers and innovators globally, including in India, as a means to enhance mobility for individuals with disabilities. This literature review examines existing mechanisms and their limitations, providing a foundation for the innovative approach of this project. The wheelchair's working principle involves key components: drive motors on each side for climbing and descending, a controller[1] unit for processing sensor data and regulating motor functions, stair-gripping wheels for traction, and a wide wheelbase for stability. During ascent, sensors detect stairs and motor engagement propels the wheelchair while a pivot mechanism allows smooth movement. For descent, motors control braking and stability, ensuring safe operation. Safety features include tilt sensors[5] to prevent tipping and infrared distance sensors to avoid collisions. Previous mechanisms, such as the lobe-type and tri-wheel types, faced issues with adaptability and user convenience, underscoring the need for a more versatile design. This project introduces a unique mechanism as shown in Fig: 1 designed to address these challenges, aiming for greater user-friendliness and stability[7].
Additionally, various wheelchair controllers, including joystick, switch, sip-and-puff, touchpad, head array, chin, and smartphone-based systems, cater to different user needs, with our project featuring an Arduino-based controller integrated with a mobile app for enhanced accessibility. The project's objectives are to improve the quality of life for elderly and disabled individuals by promoting independence, accessibility, safety, and comfort. Ultimately, it seeks to advance assistive technology and contribute to a more inclusive and innovative society. This literature review underscores the project's potential to address existing limitations and offer a significant advancement in mobility aids.
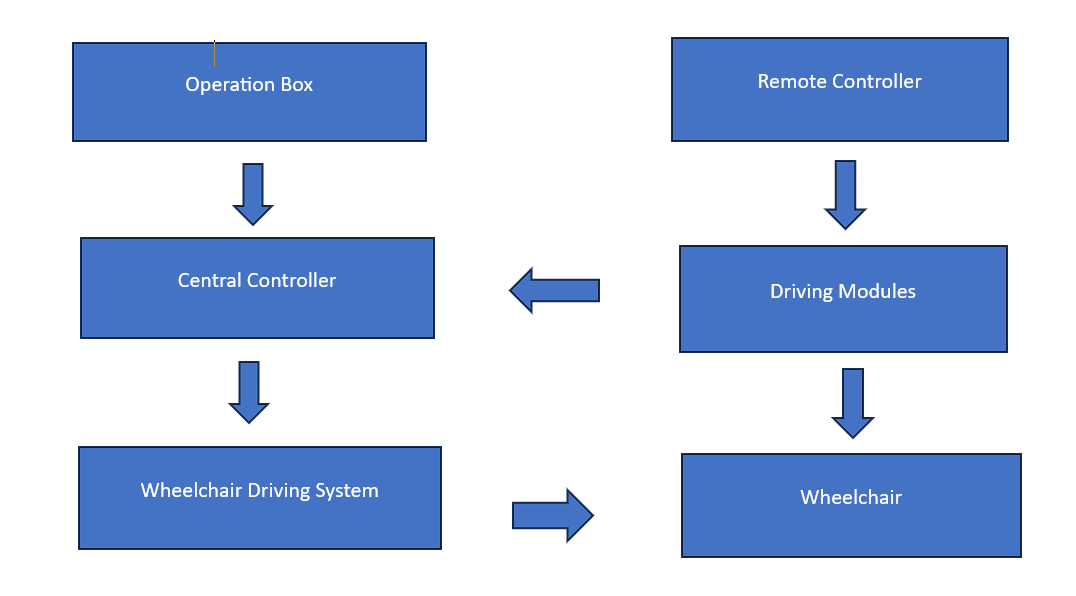
Fig: 1 BLOCK DIAGRAM
III. CAD DESIGN AND FABRICATION
Computer-Aided Design (CAD) as shown in Fig: 2 played a crucial role in the development of our stair-climbing wheelchair by allowing us to create detailed 3D models[4] and simulations. These CAD models provided precise dimensions and visualizations, ensuring that the wheelchair would fit its intended space and interact safely with its environment. CAD also facilitated the creation of accurate dimensioned drawings and simulations, which are essential for both designers and manufacturers. In the fabrication [8] phase, we selected strong yet lightweight materials, such as aluminum, to construct the wheelchair. Parts were shaped and assembled using precision techniques and welding methods, with a focus on user comfort through adjustable seating and supportive padding. Rigorous testing ensured the wheelchair's safety and reliability.

Fig: 2 CAD DESIGN
The wheelchair features eight robust steel rollers as shown in Fig: 3 , four on each side, with a diameter of 800mm. These rollers are designed to enhance mobility by providing better traction and stability on stairs. Steel was chosen for its strength, durability, and ease of maintenance, making it suitable for the demands of daily use while minimizing slippage risks. The wheelchair belt, measuring 600mm in width, 1200mm in length, and 500mm in height, is engineered to handle the load of both the user and the chair. It is designed with a strong grip to ensure safety and durability through repeated use. For belt tensioning, a screw tensioner [11] mechanism was implemented. This method allows for straightforward adjustment of the belt's tension by turning a screw or bolt, providing precise control and ensuring consistent performance over time. This simplicity and adjustability are essential for maintaining optimal belt tension and ensuring the wheelchair operates effectively under various conditions.
Avoid combining SI and CGS units, such as current in amperes and magnetic field in oersteds. This often leads to confusion because equations do not balance dimensionally. If you must use mixed units, clearly state the units for each Equations


Fig: 3 ROLLER DESIGN
IV. WHEELCHAIR DESIGN
In wheelchair design, various resistances impact movement, including rolling resistance, aerodynamic resistance, and inertial resistance. These factors vary depending on different parameters and are crucial for the overall performance of the wheelchair.
A. Centre of Gravity Calculation
To ensure effective stair-climbing capabilities, we considered specific stair dimensions[3], with a width of 240mm and a height of 140mm as reference points for our design. Based on the geometrical relationships, we calculated the rotation arm as 104mm and determined the radius to be 90mm, resulting in an angle of 22° for the wheelchair's interaction with stairs. Ensuring that the drive shaft's center does not exceed this radius is critical to prevent interference with the stair edges. For the wheelchair to climb stairs without slipping, the center of gravity must be positioned at 0.34m from the rear wheel, as this placement satisfies the necessary conditions to prevent slipping.
B. Calculation Of Torque
For the calculation of torque, we assumed the maximum height of a single stair [4] to be 7 inches and the base to be 10 inches, converting these measurements to millimeters. The slope of the stair was calculated as 35°, with a total mass of 100kg. The normal force was determined to be 803.58N, while the frictional force was 160.7N, and the opposing force was 562.67N. The required torque to overcome these forces was calculated to be 72.34Nm. This calculation was also extended to account for movement on flat ground and slopes.
V. INTERNAL ARCHITECTURE
The internal architecture of the stair-climbing wheelchair relies on a well-defined power supply system to ensure optimal performance of its components [8]. The Arduino Uno, serving as the central controller, is crucial for coordinating the wheelchair's various functions. It manages connections to essential modules including sensors, motors [10], and a Bluetooth receiver as shown in Fig: 4. This setup allows for seamless communication between the Arduino Uno and a smartphone via Bluetooth as shown in Fig: 5, facilitating user control of the wheelchair. The system is structured into four primary segments: the controller (Arduino Uno), program logic, wheelchair hardware, and a mobile app.
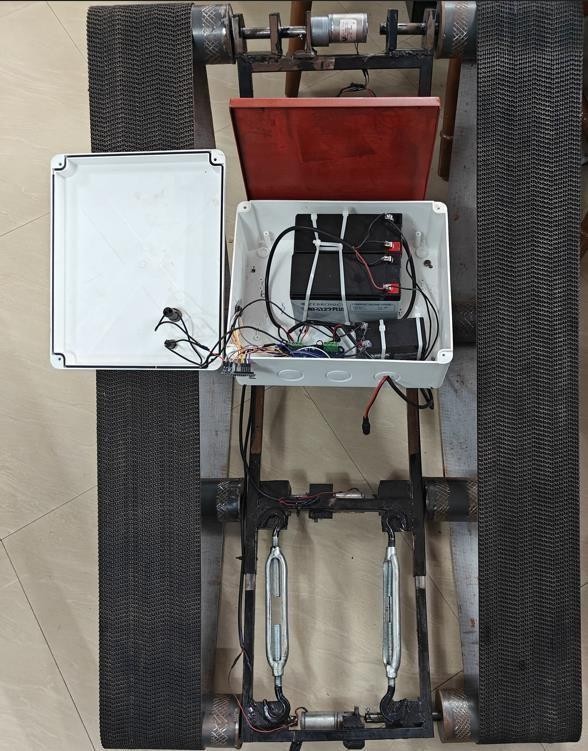
Fig: 4 Internal Architecture
The controller's circuit diagram as shown in Fig: 6, illustrated features the Arduino Nano as the core of our prototype. This microcontroller board is the programmable heart of the system, receiving input from user interfaces like joysticks or buttons and converting these signals into actionable instructions. Given that the Arduino Nano's GPIO (General Purpose Input/Output) pins have limited current capacity, a motor driver circuit is employed to manage the high-power motors necessary for stair climbing. This motor driver acts as an intermediary, amplifying control signals from the Arduino to a level suitable for powering the motors. Through specific GPIO pins, the Arduino Nano sends signals to the motor driver circuit, which then controls the motors' direction and speed. This setup ensures precise control of the wheelchair’s movement during stair climbing.

Fig: 5 Controller
VI. CONTROLLER
Our main focus was on the control of the prototype, specifically using an Arduino Uno controller circuit connected to a motor driver to manage four motors. The Arduino Uno, which is the central microcontroller based on the ATMEL AVR [9], runs the code that controls the entire circuit. The motor driver interfaces with the Arduino, allowing control over the motors, including speed and direction, using an H-bridge circuit. These motors serve as the actuators performing the physical tasks. The control signals from the Arduino are carried through power connections to the motor driver, with external power sources available to power both the motors and the Arduino board. Additionally, an HC-05 module is included to enable wireless communication between the wheelchair and an external device, such as a mobile phone.
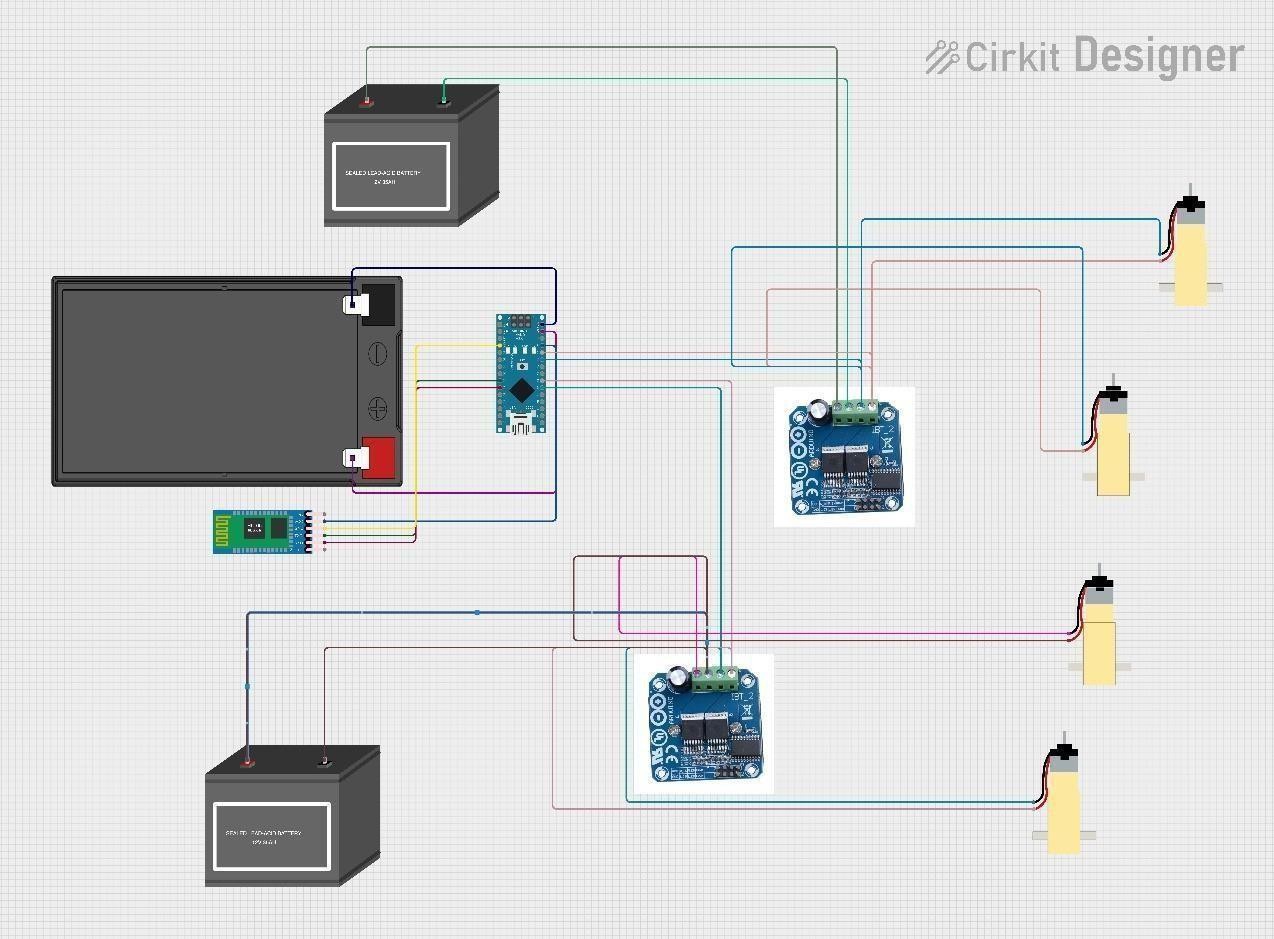 Fig: 6 CONTROLLERS CIRCUIT DIAGRAM
Fig: 6 CONTROLLERS CIRCUIT DIAGRAM
In this setup, the Arduino is connected to the motor driver's enable (ENA/ENB) and input (IN1, IN2, IN3, IN4) pins. By using PWM (Pulse Width Modulation) signals from the Arduino, the speed of the motors can be controlled by adjusting the voltage [9] applied to them. The system also includes Bluetooth interfaced control, where the user controls the electric wheelchair via a mobile application. The HC-05 Bluetooth module serves as a wireless bridge between the wheelchair's control system and the user's mobile app, allowing commands to be sent wirelessly to adjust the wheelchair's speed or direction. This setup also provides remote assistance and monitoring capabilities for caregivers or family members, enabling them to monitor the wheelchair's status, battery level, and location in real time, fostering user independence while ensuring safety.
Conclusion
Electric stair-have the potential to greatly enhance the mobility and independence of people with disabilities. As technology advances, we can expect to see even more innovative and sophisticated designs in this field. Future advancements may include more compact and lightweight models, making these wheelchairs easier to transport and manoeuvre. Improved sensor technology is also anticipated, leading to more accurate and reliable stair detection and obstacle avoidance. The integration of artificial intelligence (AI) could further enhance the performance and safety of these wheelchairs, enabling more efficient navigation of stairs and avoidance of potential hazards. Additionally, the incorporation of voice control and gesture recognition could make these wheelchairs easier to operate for individuals with limited mobility. There is also the potential for integration with other assistive technologies, such as exoskeletons, to provide even greater mobility and independence. As awareness and acceptance of electric stair-climbing wheelchairs grow, we can expect increased demand and potentially lower costs. Overall, the future of these devices is promising, with continued innovation and investment poised to make a significant impact on the lives of people with disabilities. In concluding the project, a functional electric stair-climbing wheelchair was developed, capable of handling stairs while ensuring user comfort. The design process involved careful consideration of motor functionality through computer testing and simulation. Computer-aided design (CAD) was instrumental in creating a wheelchair that is not only capable of navigating stairs but also designed for comfort. The motor, which serves as the wheelchair\'s engine, was tested in simulations to ensure smooth operation. The controller hardware, functioning as the brain of the wheelchair, was designed to work seamlessly with the motor, ensuring smooth performance overall.
References
[1] J. Sun, \"A novel design of the intelligent stair-climbing wheelchair,\" 2020 6th International Conference on Mechanical Engineering and Automation Science (ICMEAS), Moscow, Russia, 2020. [2] T. Seo, S. Ryu, J. H. Won, Y. Kim and H. S. Kim, \"Stair-Climbing Robots: A Review on Mechanism, Sensing, and Performance Evaluation,\" in IEEE Access, vol. 11, pp. 60539-60561, Jan 2023 [3] Shashank Shekhar Sahoo et al. “Research on Optimization, Dynamics and Stability of Stair-climbing Wheelchair” Int. Journal of Engineering Research and Applications, Volume 6, Issue 3, (Part - 1) March 2016. [4] Rashid Ahmed Khan et al., “Design and Fabrication of Pneumatically Powered Wheel Chair-Stretcher Device” International Journal of Innovative Research in Science,Volume 02, Issue 10, October 15. [5] N.N. Sorate et al., “Stair Climbing Wheelchair for Disabled Person”, International Journal of Mechanical and Industrial Technology ISSN 2348-7593 (Online) Volume 03, Issue 02,. March 2016. [6] B. C. W. Gamage and M. Parnichkun, \"Pitch Balancing Control of a Flipping Two- Wheel Stair Climbing Robot,\" 2019 First International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 2019 [7] Mohammed Hayyan Al Sibai and Sulastri Abdul Manap, “A Study on Smart Wheelchair Systems”, International Journal of Engineering Technology and Sciences,June 2015 [8] Deepak Kumar Lodhi, Prakshi Vats, Addala Varun, Prashant Solanki, Ritakshi Gupta1, Manoj Kumar Pandey, Rajat Butola, “Smart Electronic Wheelchair Using Arduino and Bluetooth Module”, International Journal of Computer Science and Mobile Computing, vol. 5, pp. 433-438, September 2016. [9] Tan Kian Hou, Yagasena and Chelladurai, “Arduino based voice controlled wheelchair”, First International Conference on Emerging Electrical Energy, Electronics and Computing Technologies, vol. 1432, March 2019. [10] Deepak Kumar, Reetu Malhotra, S.R. Sharma, “Design and Construction of a Smart Wheelchair”, Procedia Computer Science, vol. 172, pp. 302-307,July 2020. [11] Sreerag C et al., “Design and Development of Conceptual Wheelchair Cum Stretcher”, SASTECH, Volume 10, Issue 02, Sept 2011.
Copyright
Copyright © 2024 Adwaith Sahadevan, Mohamed Shaddad, Pranav Anil, Shalu K M. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET64104
Publish Date : 2024-08-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online