

Ijraset Journal For Research in Applied Science and Engineering Technology
Solar-Driven Agri Bot: A Storage-Free, Eco-Friendly Farming Solution
Authors: Rakesh M D, Rajath S R, Chaitra V
DOI Link: https://doi.org/10.22214/ijraset.2024.65176
Certificate: View Certificate
Abstract
This work presents an innovative solution for sustainable agriculture by utilizing solar power to directly drive its motor system without the need for energy storage. This bot is equipped with Light Dependent Resistors (LDRs) and an Arduino microcontroller, the bot adjusts motor operations based on light conditions for optimal power efficiency. A relay switch enables seamless switching between solar power and a backup battery, ensuring continuous operation in varying sunlight. The bot’s multi-motor design supports reliable movement, accommodating a range of agricultural tasks such as transporting loads, water spraying, and ploughing. Its trolley adds versatility for carrying goods, making it practical and multifunctional in the field. This eco-friendly system not only reduces energy waste but also minimizes costs and design complexity by foregoing energy storage. Offering a cost-effective, environmentally-friendly solution for modern agriculture, this bot demonstrates a valuable application of direct solar power in field operations, supporting greener, more sustainable farming practices.
Introduction
I. INTRODUCTION
In recent decades, the agricultural sector has faced growing challenges related to environmental sustainability, energy consumption, and labor shortages. As the world’s population continues to expand, the demand for food production is increasing at an unprecedented rate. Traditional farming methods, while effective in the past, are no longer sufficient to meet these demands due to inefficiencies in resource usage, high labor costs, and the detrimental impact of fossil fuel reliance on the environment. Modern agriculture, therefore, requires innovative solutions that not only increase efficiency but also reduce the environmental footprint. Among these emerging technologies, agricultural robotics and automation have shown significant promise [1]. Automation in agriculture has evolved from basic mechanical tools to advanced systems that incorporate artificial intelligence, robotics, and renewable energy sources. Agricultural robots, often referred to as "agri bots," have been developed to perform a variety of tasks such as planting, ploughing, irrigation, and harvesting, greatly reducing the need for human intervention. However, one of the critical challenges faced by these robots is the reliance on traditional energy sources, particularly systems powered by batteries. These energy storage solutions are not only expensive but also require constant maintenance and replacement, adding to the operational costs. Moreover, batteries have a limited lifespan and pose environmental risks when improperly disposed of [4]. In response to these challenges, solar-powered systems have emerged as a viable alternative. Solar energy, being abundant, renewable, and eco-friendly, offers a sustainable power source for various agricultural applications. Solar-powered agricultural robots, in particular, are gaining traction due to their ability to harness the sun's energy to perform tasks without relying on conventional energy grids. However, many of these solar systems still incorporate batteries as energy storage units, which reintroduces the complexities and limitations associated with battery-dependent systems [7]. The need for energy storage also raises concerns about efficiency during extended periods of cloud cover or nighttime operation, which necessitates either large batteries or additional backup power sources.
The concept of a storage-free solar-powered system offers a breakthrough in overcoming these limitations. By directly powering motors and other components from solar energy, such systems eliminate the need for batteries and associated complexities. The solar-driven agri bot, a pioneering model based on this concept, is an innovative solution designed to optimize energy usage while performing various agricultural tasks. This bot relies on direct sunlight to power its motor system, making it a cost-effective and environmentally friendly alternative to traditional agricultural machines. Unlike many solar-powered systems that rely heavily on energy storage, this bot leverages real-time solar power to drive its motors, thereby significantly reducing costs, maintenance, and environmental impact [3]. The core functionality of the solar-driven agri bot revolves around its integration of Light Dependent Resistors (LDRs) and a motor control system. LDRs, which are light-sensitive devices, detect ambient light levels and allow the bot to adjust its operation based on available sunlight.
When sufficient sunlight is present, the bot draws power directly from its solar panel, driving its motors to carry out tasks such as transporting loads, spraying water, and even ploughing. During periods of low light, the bot can switch to a backup battery system through a relay mechanism, ensuring uninterrupted operation. This seamless transition between solar power and battery backup allows the bot to operate in a wide range of environmental conditions without the need for large-scale energy storage systems [2]. The solar-driven agri bot’s design also incorporates a robust motor control system capable of managing multiple motors simultaneously. This feature allows the bot to perform several agricultural tasks efficiently. For example, the bot can be used to carry loads of harvested crops or farming supplies using its built-in trolley system. It can also be equipped with water tanks and spraying mechanisms to irrigate crops autonomously. In addition to these functions, the bot can be used for ploughing fields, reducing the need for manual labor and increasing the overall efficiency of farm operations [5]. One of the primary advantages of this system is its potential to reduce the overall cost of agricultural operations. By eliminating the need for energy storage, farmers can significantly cut down on equipment and maintenance costs associated with battery-powered systems. Furthermore, the use of solar energy drastically reduces the dependency on fossil fuels, which not only lowers operational costs but also contributes to reducing the carbon footprint of agricultural practices. The solar-driven agri bot offers a sustainable alternative to traditional farming machinery, aligning with global efforts to combat climate change and promote environmental conservation [6]. In addition to its environmental benefits, the solar-driven agri bot addresses the issue of labor shortages in agriculture. In many parts of the world, agricultural labor is becoming increasingly scarce, driving up wages and reducing productivity. Automated systems like the solar-driven agri bot can help fill this gap by performing repetitive and labor-intensive tasks autonomously. This not only boosts farm productivity but also frees up human labor for more complex tasks that require critical thinking and decision-making [9]. Moreover, the bot’s reliance on solar energy allows it to operate in remote or off-grid locations where access to traditional power sources may be limited or non-existent. This makes it an ideal solution for small-scale farmers in rural areas who may not have the resources to invest in large, grid-connected farming equipment. The solar-driven agri bot provides these farmers with an affordable and sustainable tool for improving their farming practices and increasing their yields [11]. This paper underscores the transformative impact of renewable energy on the automotive industry. By reducing dependence on fossil fuels and minimizing greenhouse gas emissions, our solar-powered vehicle contributes to a cleaner and more sustainable environment. This work represents a significant step forward in the pursuit of sustainable transportation, demonstrating that eco-friendly vehicles can also offer superior performance. As we continue to innovate and refine this technology, we envision a future where solar-powered vehicles become a mainstream choice for eco-conscious consumers, driving us towards a greener and more sustainable world.
II. LITERATURE SURVEY
- Gorjian et.al, in their proposed work discussed that, in recent years, the push to reduce agriculture's dependence on fossil fuels has become more urgent due to their limited availability and the negative impact they have on the environment. Renewable energy, particularly solar power, has emerged as an ideal alternative for farming, given its compatibility with agricultural practices. The use of photovoltaic (PV) technology in farming has proven to be a sustainable solution, cutting the need for oil-based fuels and reducing greenhouse gas emissions. With modern farms increasingly relying on electrification, solar energy presents a cost-effective way to generate electricity. However, the widespread use of solar-powered machinery faces two main obstacles: the high upfront costs of PV modules and battery storage, and the limitations in current energy storage technology. Additionally, environmental factors like temperature, dust, and humidity can affect the efficiency of solar panels in outdoor settings. Despite these challenges, advancements in technology, cost reductions, and government support could help make solar-powered farm machinery more accessible and widely adopted. This approach could lead to more sustainable farming practices, encouraging stakeholders to invest in solar energy for modern agricultural machinery.
- Obalalu et.al, in their study looks at how using solar-powered tractors can improve agricultural productivity and energy efficiency. By using solar energy, tractors can reduce the reliance on non-renewable energy and help lower carbon emissions, making farming more environmentally friendly. The research focuses on improving energy use by studying how different nanofluids, such as copper-engine oil (Cu-EO) and silver-engine oil (Ag-EO), affect heat transfer and fluid flow in the tractor's cooling system. These nanofluids are analyzed through various factors like solar thermal radiation, viscous dissipation, and velocity. The study uses mathematical methods to simplify complex equations and found that the Ag-EO fluid flows more smoothly than the Cu-EO fluid, while both fluids show better heat transfer properties than standard fluids. Nanofluids, especially the Ag-EO, were shown to be more efficient, making them suitable for use in cooling systems. The results suggest that solar-powered tractors using these advanced nanofluids can make farming more efficient and eco-friendlier, contributing to sustainable agricultural practices.
- Ramli et.al, in their projected work, presents a solar-powered portable water pump (SPWP) designed for smart irrigation systems (IoT SIS) that are enabled by the Internet of Things (IoT). The system uses a NodeMCU microcontroller with Wi-Fi, along with sensors that measure soil moisture, temperature, and humidity. These sensors allow farmers to monitor and control the water pump remotely. The gathered data is sent in real-time to the Blynk IoT cloud, and farmers can access this information and control the pump using a smartphone app. The portable pump, powered by solar energy, is designed like wheeled luggage for easy movement and includes features like a water filter and multiple nozzles for efficient spraying. The solar-powered pump helps reduce electricity consumption and operational costs. By integrating IoT technology, farmers can monitor and control the pump in real-time, improving water efficiency and simplifying irrigation tasks. The system has been successfully tested in real-world conditions, proving its effectiveness in enhancing farming operations.
- Gangadhar et.al, in their research study focuses on the development of a solar-powered, remote-controlled seed sowing machine with an integrated sprayer, designed to help farmers improve crop production without harming soil quality. The machine is powered by solar energy, which is converted into electricity through a solar panel and then used to drive a DC motor for movement and operation. To reduce the need for manual labor, the machine is equipped with IR sensors that help it navigate the field, using post sensors to define boundaries and track its movement from line to line. The machine performs multiple farming tasks, such as digging, seed sowing, and irrigation, using a seed hopper and water tank. By using solar power instead of fossil fuels, the machine helps reduce air and noise pollution while also lowering costs and labor requirements. It ensures proper seed and row spacing, making the entire sowing process more efficient and environmentally friendly.
- Chadalavada et.al, in their work highlights the importance of agriculture in India, where it plays a key role in the economy and supports many farmers. The paper aims to develop a multipurpose agricultural machine that can perform tasks such as seed sowing, water spraying, and grass cutting, helping farmers overcome common challenges. By using this machine, farmers can increase crop production while saving time, contributing to India's goal of becoming a leader in global agriculture. The machine is powered by solar energy, a renewable and cost-effective resource, making it affordable and eco-friendly. This innovation not only reduces farming costs but also promotes the use of advanced technology in agriculture, encouraging future generations to adopt modern farming methods for better productivity and sustainability.
- Jamshed et.al, in their paper work investigates the use of nanofluids and entropy production analysis in Parabolic Trough Solar Collectors (PTSCs) within solar-powered ships (SPS). Parabolic collectors are generally used for generating high temperatures in solar-thermal applications. In this case, nanofluids like single-walled carbon nanotubes (SWCNT) and multi-walled carbon nanotubes (MWCNT) mixed with engine oil are explored to improve heat transfer. The researchers used complex mathematical models, like the Maxwell fluid model and Darcy-Forchheimer effects, to analyze flow and heat transfer through the collector. The Cattaneo-Christov approach helped in understanding the heat flux in the thermal boundary layer, and the Keller-box method solved the governing equations. The study revealed that using SWCNT-EO nanofluid improved thermal efficiency compared to MWCNT-EO, and factors like magnetic effects, flow rates, and viscosity changes influenced the system's performance. The research contributes to optimizing solar thermal systems by enhancing heat transfer using advanced nanofluids.
- Thakur et.al, in their proposed system focuses on the growing importance of solar energy in agriculture in India, where the majority of people rely on farming. As agriculture demands a lot of water and power, the need for renewable energy has become critical due to rising energy consumption, limited fossil fuels, and pollution concerns. Given India's favorable solar potential, solar energy use has increased more than other renewable sources. The study explores different solar technologies in agriculture, such as solar-powered water pumps, crop drying systems, and water desalination. It also reviews key policies, government initiatives, and research aimed at promoting solar energy in farming. The work highlights India’s progress in solar energy, the challenges it faces, and the potential for future developments. This research is valuable for understanding the role of solar energy in agriculture and its potential to create sustainable farming practices.
- Poojari et.al, in their research work discussed on creating a solar-powered multifunctional agricultural robot specifically designed for cotton farming. This robot aims to improve seed sowing operations, which often require precise spacing between plants for optimal growth and yield. Additionally, it helps measure important factors like soil moisture, soil quality, and plant health. To achieve this, the robot is equipped with various sensors that monitor conditions such as light intensity, carbon dioxide levels, nitrogen content in the air, temperature, and humidity, achieving 80% accuracy in data collection. This innovation can address labor shortages and boost farm productivity by up to 30% while being cost-effective. The design of the robot was developed using SolidWorks, and its performance was analyzed with ANSYS software. Overall, this research highlights the potential of technology to enhance agricultural practices and efficiency.
- Krishnan et.al, in their proposed framework introduces a solar-powered mobile-controlled agricultural robot designed to assist farmers in managing their farming tasks using a mobile app. This robot can perform essential functions like ploughing, sowing, and watering crops without needing manual labor. It waters the fields only when they are dry, ensuring efficient water use. Farmers can control the robot's movement and operations directly from their smartphones, significantly reducing the need for extra manpower. The use of solar power for the robot also lowers electricity consumption during farming activities. Overall, this solar-powered mobile-controlled agrobot provides a practical solution for farmers by increasing efficiency, minimizing labor costs, and promoting sustainable farming practices.
- Sai et.al, in their projected study discussed that in India, many people rely on agriculture for their livelihoods, engaging in tasks like seed sowing, grass cutting, and pesticide spraying. While various agricultural tools are available, most are designed for single purposes, which can lead to higher costs. The development of a multipurpose agricultural robot aims to address this issue by offering multiple functionalities in one machine. This robot is based on the Internet of Things (IoT), allowing users to monitor crop conditions and perform specific tasks using a user-friendly Android app. This technology not only streamlines agricultural operations but also helps farmers make informed decisions about suitable crops based on various factors. The proposed robot can carry out essential functions such as sowing seeds, cutting grass, and spraying pesticides, making farming more efficient and cost-effective. Additionally, it incorporates machine learning to assist non-technical farmers in selecting the right crops based on their unique conditions. By integrating these technologies, the robot can significantly enhance productivity while reducing labor and input costs. This research emphasizes the potential of IoT and automation in agriculture, helping to improve farming practices and support the livelihoods of farmers in India.
- Saima et.al, in their research mentions about the exploration of agricultural robotics that employs various technologies and methodologies to enhance farming efficiency and productivity. Shahbaz et al. (2020) utilized a combination of automated systems, such as robotic seed sowers and irrigation drones, to demonstrate how automation can alleviate labor shortages and optimize resource usage. Their approach involved experimental trials in different farming environments to assess the impact of these technologies on crop yields and operational efficiency. Kumar et al. (2019) focused on solar-powered systems, employing photovoltaic panels to power agricultural robots. They conducted field tests to evaluate the performance of these robots in real-world scenarios, analyzing energy consumption and cost savings associated with solar energy use. In their studies, Rai et al. (2021) emphasized a multidisciplinary approach by incorporating both technological and policy aspects. They conducted case studies of various pilot projects, utilizing qualitative and quantitative methodologies to assess the effectiveness of smart agricultural robots. Surveys and interviews with farmers were used to gauge trust and acceptance of these technologies. Their findings highlighted the need for collaboration between technology developers and governmental entities to facilitate successful implementation. By integrating these methodologies, the proposed work aims to develop a multi-functional agricultural robot tailored for Bangladesh, enhancing economic development while addressing the specific needs of local farmers.
- Bose et.al, in their research framework presents that the development of robotic systems designed to perform essential farming tasks—such as ploughing, seed sowing, grass cutting, and irrigation—addresses these challenges. For instance, the proposed robotic system utilizes solar photovoltaic (PV) panels, eliminating the need for external power sources and making it more sustainable and cost-effective compared to conventional tractors and electric pumps. The proposed robotic vehicle operates through an Android application that interfaces with a PIC18F4520 microcontroller via Bluetooth, allowing precise control over various farming activities. The incorporation of DC motors ensures efficient ploughing and seed sowing, maintaining consistent distances for optimal planting. Additionally, the robot features a sprinkler system with rotating nozzles for effective irrigation, along with a dual-edged blade mechanism for efficient grass cutting. This innovative approach not only reduces labor costs and increases operational speed but also enhances the precision of agricultural tasks. By integrating multiple functionalities into a single system, the project demonstrates significant potential for improving the economic viability of farming operations while promoting energy efficiency in agricultural practices.
- Spoorthi et.al, in their proposed paper discusses the design and development of a multifunctional robot capable of performing critical operations such as seed sowing, grass cutting, and pesticide spraying, thereby addressing the pressing need for innovative tools in the agricultural sector. The proposed robotic system operates on a rechargeable battery powered by solar energy, promoting sustainability and reducing reliance on conventional power sources. Utilizing LoRa (Long Range) technology for long-distance communication, the robot receives signals to execute its tasks efficiently. This integration not only streamlines operations like seed sowing and pesticide application but also mitigates the challenges associated with manual planting methods. By improving operational efficiency and reducing the physical demands on farmers, this project exemplifies the potential of robotics to revolutionize agriculture in India, ultimately contributing to increased productivity and economic sustainability within the sector.
- Naik et.al, the proposed robot features a robust design with four independently controlled wheels powered by L-type geared DC motors, all driven by a solar-charged battery system. Utilizing a Raspberry Pi as the main controller, the robot processes data from a camera and ultrasonic sensors, enabling it to navigate autonomously. The system is further enhanced by a mobile application that allows users to input desired routes via GPS technology, facilitating precise field monitoring and automation. This comprehensive approach not only simplifies various agricultural operations but also provides a sustainable solution to contemporary farming challenges, ultimately empowering farmers to increase productivity while minimizing effort and cost.
- Scolaro et.al, in their paper reviews the electrification of agricultural machinery as a viable solution to mitigate environmental impact while enhancing performance, productivity, and safety. It emphasizes the potential benefits of transitioning to electric and hybrid-electric tractors, which could dramatically reduce emissions compared to traditional diesel-powered equipment. The review provides a comprehensive analysis of the advancements in electric drives for farming tractors, synthesizing findings from existing literature and examining state-of-the-art technologies. It covers various proposals and prototypes developed by manufacturers, highlighting innovative designs and their economic assessments. Additionally, the paper discusses future trends in agricultural machinery electrification, indicating a shift toward more sustainable practices in the industry. By integrating electric drives into agricultural equipment, the potential for improved efficiency and reduced environmental footprint could reshape the future of farming, aligning it with global sustainability goals.
- Majeed et.al, in their projected study offers a comprehensive overview of alternative energy sources suitable for powering agricultural operations, with a particular emphasis on renewable energy technologies. Given the crucial role of agriculture in the global economy, energy is essential at every stage of production, from fertilizer creation to the operation of machinery like tractors for planting and harvesting. Rising energy prices and volatile markets significantly impact input costs for agricultural producers. The adoption of energy efficiency measures and the utilization of renewable energy sources—such as solar, biomass, wind, and geothermal—can help mitigate these challenges. This review aims to explore how renewable energy can serve as an alternative energy source, thereby improving energy management within the agricultural sector. The paper discusses the myriad benefits and challenges associated with integrating renewable energy technologies into agricultural practices. By providing insights into the applicability of these energy sources, the research highlights opportunities for agricultural stakeholders to transition towards more sustainable energy practices. It underscores that effective energy management necessitates a broader strategy that addresses technical, economic, and policy barriers while fostering education and capacity building among farmers. Ultimately, transitioning to alternative energy sources is posited as a promising avenue for reducing greenhouse gas emissions, enhancing energy efficiency, and promoting sustainability in food production, which is essential for meeting the demands of a growing global population.
- Quaglia et.al, in their discussed method, focuses on he development of unmanned ground vehicles (UGVs) for precision agriculture has garnered significant attention due to the increasing demand for sustainable farming practices and efficient resource management. Recent literature highlights various innovative designs and technologies that enhance the capabilities of UGVs, enabling them to navigate challenging terrains while performing intricate agricultural tasks. For instance, studies have demonstrated the integration of multi-degree-of-freedom (DOF) manipulators, which improve the flexibility and adaptability of UGVs in diverse agricultural environments. The use of vision sensors and advanced control algorithms further supports real-time decision-making and enhances the perception of irregular field conditions, facilitating tasks such as crop monitoring, pest detection, and soil analysis. Such advancements underscore the potential for UGVs to act as crucial components in automated farming systems, promoting operational efficiency and reducing labor costs. Additionally, the integration of drone technology with UGVs represents a promising direction for precision agriculture. Research has shown that equipping UGVs with drone landing platforms, especially those harnessed with solar energy, can lead to synergistic effects in field operations. This multi-robot strategy allows for coordinated aerial and ground surveillance, resulting in improved data collection and analysis capabilities. Moreover, the discussion surrounding electronics and communication systems emphasizes the importance of robust data transmission for autonomous navigation and remote control, thereby enhancing the operational reliability of UGVs like Agri.q. As the agricultural sector continues to embrace automation, the collaborative use of UGVs and unmanned aerial vehicles (UAVs) stands to revolutionize farming practices, leading to more sustainable and productive agricultural systems.
- Rafath et.al, in their proposed study discussed about the evolution of agricultural robotics has significantly transformed farming practices, emphasizing the need for efficient and cost-effective solutions to support modern agriculture. Recent studies indicate a growing trend toward the development of multifunctional agricultural robots capable of performing various tasks such as soil tilling, seed sowing, pest spraying, and grass cutting. These robots aim to alleviate the labor burden on farmers, particularly in regions where manual farming is challenging due to adverse weather conditions or labor shortages. Traditional agricultural robotics often employed complex and costly techniques, making them less accessible to small-scale farmers. However, innovations such as the design of low-cost robots like AGRIBOT have emerged, incorporating simpler mechanisms that still offer high functionality and reliability. The focus on affordability without compromising efficiency is crucial in making agricultural technology more inclusive. Furthermore, the integration of renewable energy sources, specifically solar energy, has gained traction within the agricultural robotics domain. Solar-powered systems, such as those employed by AGRIBOT, not only reduce operational costs but also contribute to sustainable farming practices. The incorporation of visual obstacle detection and Bluetooth communication enables remote operation and enhanced maneuverability, making it easier for farmers to control agricultural tasks without being physically present in the field. This feature is particularly beneficial for managing crops in various climatic conditions, ensuring that agricultural activities can continue regardless of time constraints. By adopting advanced technologies and innovative designs, agricultural robots like AGRIBOT are paving the way for smart farming solutions that promote efficiency, reduce labor, and foster sustainability, ultimately contributing to increased agricultural productivity.
- Jerosheja et.al, in their research method, discussed that the agricultural project leverages Internet of Things (IoT) technology for real-time monitoring and control of field conditions, enabling remote management of agricultural operations from any location. The system is equipped with dual control mechanisms: field control and robot control. Field control utilizes sensors to measure soil moisture, temperature, and humidity, with updates sent to farmers via a mobile app, while intruder detection is achieved through PIR sensors and image processing techniques. The robot control integrates a camera for live field monitoring and can operate in both automated and manual modes, performing tasks like pesticide spraying and weed control. Powered by a solar panel for eco-friendly energy, this approach reduces labor, enhances efficiency, and ensures sustainable energy use.
III. METHODOLOGY
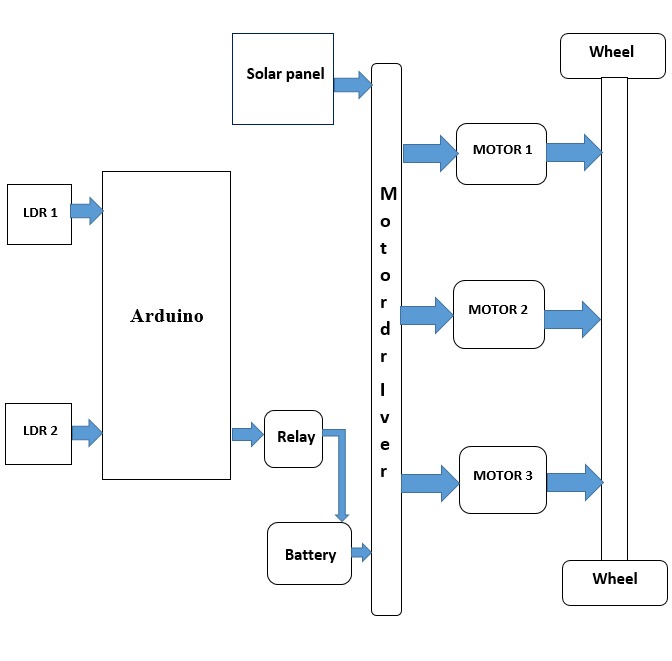
Figure 1: Block Diagram
The methodology for this system centres around a system which can be seen from the above Figure 1: Block Diagram that utilizes solar power to operate efficiently without relying on energy storage. The bot is designed with a solar panel that directly powers its motors during daylight, ensuring that it functions when sunlight is sufficient. Light Dependent Resistors (LDRs) are employed to detect ambient light levels, allowing the bot to adjust its operations based on real-time sunlight availability. These LDRs relay information to an Arduino microcontroller, which serves as the control unit of the system. The Arduino processes the data from the LDRs and regulates motor activity by directing the motors to run on solar energy when adequate sunlight is available, thereby eliminating the need for energy storage solutions like batteries.
To maintain continuous operation in low-light conditions, such as during cloudy weather or dusk, the bot is equipped with a backup battery system controlled by a relay switch. The relay ensures a smooth transition between solar power and battery power whenever the LDRs detect insufficient sunlight. This dual power source design guarantees that the bot remains operational across varying environmental conditions without the complexities and costs associated with traditional battery-dependent systems. The backup battery is activated only when necessary, minimizing energy consumption and prolonging its lifespan.
The bot is capable of performing multiple agricultural tasks, made possible by a multi-motor configuration managed through a motor driver. Each motor is responsible for different functions such as movement, carrying loads, ploughing, or spraying water. The motor driver takes instructions from the Arduino, which distributes power based on available energy and task demands. This methodology ensures that the solar-powered agri bot can autonomously execute essential farming operations with minimal manual oversight, providing an eco-friendly and efficient solution for modern agricultural needs through the integration of renewable energy and automation technologies.
To maximize the solar panel's exposure to sunlight, a piece of cardboard was employed to elevate it. This elevation helps to capture more sunlight, thereby improving the efficiency of the power generation. The cardboard was securely attached using hot glue, which not only provided stability but also allowed for modifications to conceal the wires for a cleaner appearance. Additionally, hot glue was used generously to secure the wires in place and to insulate them, ensuring safe and effective operation of the circuit. This careful assembly helps in maintaining a tidy setup and preventing any potential short circuits or disconnections, thereby enhancing the durability and functionality of the solar-powered vehicle.
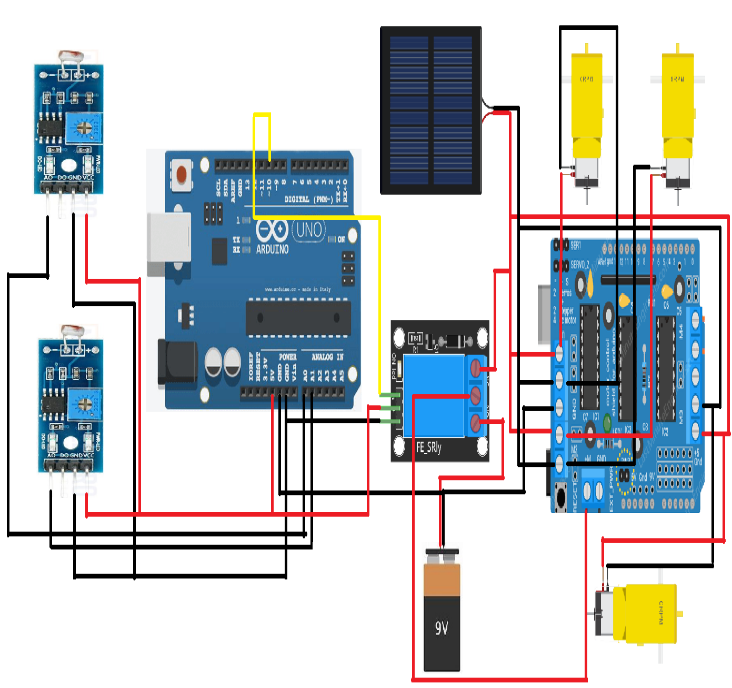
Figure 2: Schematic Diagram
As shown in the Figure 2: Schematic diagram, the setup includes three BO motors, an Arduino Uno, a motor driver shield, a solar panel, a 9V battery, and a relay module. The three BO motors are connected to the motor driver shield, which controls their operation by receiving signals from the Arduino. The system can switch between two power sources: the solar panel or the 9V battery. The power source is selected using the 5V relay module based on the light intensity detected by two light-dependent resistors (LDRs), which are also connected to the Arduino. When the LDRs detect sufficient light, the relay module directs the solar panel to power the system, while in low-light conditions, the relay switches to the 9V battery.
The motor driver shield, is responsible for managing the three BO motors' power and direction, while the Arduino sends control signals based on the LDR readings. The relay module, connected to the Arduino's digital pins, acts as the switch between solar and battery power, ensuring the motors receive uninterrupted power. The LDRs provide analog input to the Arduino, which processes the data to determine whether to engage the solar or battery source, making the system energy-efficient by automatically switching power sources based on environmental light conditions.
IV. RESULTS AND DISCUSSION

Figure 3: Solar Driven Agri Bot for transporting loads in agriculture land

Figure 4: Top View of the Model
The results of this prototype, as illustrated in the schematic diagram and figure, highlight its ability to efficiently perform small-scale agricultural tasks. The bot successfully demonstrates the capability to transport agricultural goods using a solar panel to directly power the motors. The system effectively switches between solar and battery power based on the intensity of sunlight, as detected by the LDRs. This feature ensures continuous operation of the bot during various light conditions, showcasing its ability to function autonomously in a typical agricultural setting.
In the figure, one application of the system is depicted, showcasing its functionality in transporting loads across agricultural land. Additionally, the bot has versatile applications, including ploughing, grass cutting, and water spraying, making it an adaptable solution for various farming needs. The solar panel provides ample energy to power the motors during daylight hours, allowing the bot to move across fields with minimal effort. The integration of the motor driver shield enables precise control of the three BO motors, ensuring smooth and steady motion even while pulling a load, proving the system's efficiency in handling typical agricultural tasks. The system, by utilizing solar energy, aligns with environmentally friendly farming practices, reducing the dependency on traditional power sources. The motor driver shield and relay module worked harmoniously with the solar panel, offering a seamless switch between power sources when necessary. The setup demonstrates a practical and effective solution for sustainable agricultural operations, ensuring that the bot can assist farmers in various tasks with minimal environmental impact and operational costs, making it a promising tool for eco-friendly farming.
Conclusion
In conclusion, the solar-powered agricultural bot presents an innovative solution for enhancing agricultural efficiency while prioritizing sustainability. By harnessing solar energy, the bot reduces dependence on traditional power sources, significantly lowering operational costs for farmers. Its capacity to perform a range of tasks, such as transporting loads, ploughing, grass cutting, and water spraying, demonstrates its versatility and adaptability to various farming needs. The intelligent design allows for seamless switching between solar and battery power, ensuring continuous operation throughout the day. This approach not only minimizes environmental impact but also promotes the use of renewable energy in agriculture. By integrating such technology into farming practices, the bot aids in improving productivity while supporting eco-friendly methods. Overall, the solar-driven agri bot stands out as a practical tool for farmers aiming to optimize their operations, ultimately contributing to a more sustainable agricultural landscape.
References
[1] Gorjian, S., Ebadi, H., Trommsdorff, M., Sharon, H., Demant, M., & Schindele, S. (2021). “The advent of modern solar-powered electric agricultural machinery: A solution for sustainable farm operations.”, Journal of cleaner production, 292, 126030. https://doi.org/10.1016/j.jclepro.2021.126030 [2] Obalalu, A. M., Alqarni, M. M., Odetunde, C., Memon, M. A., Olayemi, O. A., Shobo, A. B., ... & Hendy, A. S. (2023). “Improving agricultural efficiency with solar-powered tractors and magnetohydrodynamic entropy generation in copper–silver nanofluid flow.”, Case Studies in Thermal Engineering, 51, 103603. https://doi.org/10.3390/coatings11121552 [3] Ramli, R. M., & Jabbar, W. A. (2022). “Design and implementation of solar-powered with IoT-Enabled portable irrigation system.”, Internet of Things and Cyber-Physical Systems, 2, 212-225. https://doi.org/10.1016/j.iotcps.2022.12.002 [4] Gangadhar, P. S., Gorane, R. R., Labhade, S. S., Labhade, P. S., & Sandip Jadhav, A. Solar Powered Seeds Sprayer Machine Control by Mobile.”, ISSN: 2395-7852 [5] Chadalavada, H. (2021). “Solar powered semi-automated multipurpose agriculture machine.”, Materials Today: Proceedings, 46, 3469-3473. https://doi.org/10.1016/j.matpr.2020.11.864 [6] Jamshed, W., ?irin, C., Selimefendigil, F., Shamshuddin, M. D., Altowairqi, Y., & Eid, M. R. (2021). “Thermal characterization of coolant Maxwell type nanofluid flowing in parabolic trough solar collector (PTSC) used inside solar powered ship application.”, Coatings, 11(12), 1552. https://doi.org/10.3390/coatings11121552 [7] Thakur, A. K., Singh, R., Gehlot, A., Kaviti, A. K., Aseer, R., Suraparaju, S. K., ... & Sikarwar, V. S. (2022). Advancements in solar technologies for sustainable development of agricultural sector in India: a comprehensive review on challenges and opportunities. Environmental Science and Pollution Research, 29(29), 43607-43634. https://doi.org/10.1007/s11356-022-20133-0 [8] Poojari, M., Hanumanthappa, H., Prasad, C. D., Jathanna, H. M., Ksheerasagar, A. R., Shetty, P., ... & Vasudev, H. (2023). “Computational modelling for the manufacturing of solar-powered multifunctional agricultural robot.”, International Journal on Interactive Design and Manufacturing (IJIDeM), 1-12. https://doi.org/10.1007/s12008-023-01291-y [9] Krishnan, R. S., Narayanan, K. L., Julie, E. G., Prashad, V. B., Marimuthu, K., & Sundararajan, S. (2022, February). “Solar Powered Mobile Controlled Agrobot.”, In 2022 Second International Conference on Artificial Intelligence and Smart Energy (ICAIS) (pp. 787-792). IEEE. doi: 10.1109/ICAIS53314.2022.9742856 [10] Sai Yaswanth, B., Raj, N. P., Rahul, B. P., Moger, V. M., & Murthy, B. V. (2022). “Solar power-based agriculture robot for pesticide spraying, grass cutting and seed sowing.”, In Distributed Computing and Optimization Techniques: Select Proceedings of ICDCOT 2021 (pp. 795-805). Singapore: Springer Nature Singapore. https://doi.org/10.1007/978-981-19-2281-7_73 [11] Saima, F. T. Z., Tabassum, M. T., Talukder, T. I., Hassan, F., Sarkar, P. K., & Howlader, S. (2022, May). “Advanced Solar Powered Multipurpose Agricultural Robot.”, In 2022 3rd International Conference for Emerging Technology (INCET) (pp. 1-6). IEEE. doi: 10.1109/INCET54531.2022.9824561. [12] Bhos, C. D., Deshmukh, S. M., Bhise, P. A., & Avhad, S. B. (2020). “Solar Powered Multi-Function Agri-Robot.”, International Research Journal of Engineering and Technology (IRJET), 7(06). e-ISSN: 2395-0056 [13] SPOORTHI, A., SUNIL, T., & KURIAN, M. (2021). “Multipurpose agriculture robot using lora.”, International Journal of Advanced Scientific Innovation, 2(1). DOI: https://doi.org/10.5281/zenodo.5121003 [14] Naik, B. V., & Goud, R. (2021, July). “Design and fabrication of a solar powered autonomous agricultural robot.”, In AIP Conference Proceedings (Vol. 2358, No. 1). AIP Publishing. https://doi.org/10.1063/5.0057867 [15] Scolaro, E., Beligoj, M., Estevez, M. P., Alberti, L., Renzi, M., & Mattetti, M. (2021). “Electrification of agricultural machinery: A review.”, Ieee Access, 9, 164520-164541. doi: 10.1109/ACCESS.2021.3135037 [16] Majeed, Y., Khan, M. U., Waseem, M., Zahid, U., Mahmood, F., Majeed, F., ... & Raza, A. (2023). “Renewable energy as an alternative source for energy management in agriculture.”, Energy Reports, 10, 344-359. https://doi.org/10.1016/j.egyr.2023.06.032 [17] Quaglia, G., Visconte, C., Scimmi, L. S., Melchiorre, M., Cavallone, P., & Pastorelli, S. (2020). “Design of a UGV powered by solar energy for precision agriculture.”, Robotics, 9(1), 13. https://doi.org/10.3390/robotics9010013 [18] Rafath, F., Rana, S., Ahmed, S. Z., Begum, R., & Sultana, N. (2020, June). “Obstacle detecting multifunctional AGRIBOT driven by solar power.”, In 2020 4th International Conference on Trends in Electronics and Informatics (ICOEI)(48184) (pp. 196-201). IEEE. doi: 10.1109/ICOEI48184.2020.9142983. [19] Jerosheja, B. R., & Mythili, C. (2020, February). “Solar powered automated multi-tasking agricultural robot.”, In 2020 International Conference on Innovative Trends in Information Technology (ICITIIT) (pp. 1-5). IEEE. doi: 10.1109/ICITIIT49094.2020.9071542. [20] Yan, X. T., Bianco, A., Niu, C., Palazzetti, R., Henry, G., Li, Y., ... & Scott, R. (2020). “The agrirover: a reinvented mechatronic platform from space robotics for precision farming.”, Reinventing Mechatronics: Developing Future Directions for Mechatronics, 55-73. https://doi.org/10.1007/978-3-030-29131-0_5 [21] Mocera, F., & Somà, A. (2020). “Analysis of a parallel hybrid electric tractor for agricultural applications.” Energies, 13(12), 3055. https://doi.org/10.3390/en13123055 [22] Rossi, C., Pontara, D., Falcomer, C., Bertoldi, M., & Mandrioli, R. (2021). “A hybrid–electric driveline for agricultural tractors based on an e-CVT power-split transmission.”, Energies, 14(21), 6912. https://doi.org/10.3390/en14216912 [23] Lagnelöv, O., Larsson, G., Nilsson, D., Larsolle, A., & Hansson, P. A. (2020). “Performance comparison of charging systems for autonomous electric field tractors using dynamic simulation.”, biosystems engineering, 194, 121-137. https://doi.org/10.1016/j.biosystemseng.2020.03.017 [24] Lagnelöv, O., Larsson, G., Nilsson, D., Larsolle, A., & Hansson, P. A. (2020). “Performance comparison of charging systems for autonomous electric field tractors using dynamic simulation”, biosystems engineering, 194, 121-137. https://doi.org/10.1016/j.biosystemseng.2020.03.017 [25] Troncon, D., & Alberti, L. (2020). “Case of study of the electrification of a tractor: Electric motor performance requirements and design.”, Energies, 13(9), 2197. https://doi.org/10.3390/en13092197
Copyright
Copyright © 2024 Rakesh M D, Rajath S R, Chaitra V. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET65176
Publish Date : 2024-11-12
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online