

Ijraset Journal For Research in Applied Science and Engineering Technology
Structural Analysis of Self-Balancing Robot
Authors: Dr. M. M. Sayyad, Shantanu Nalawade, Jay Palkar, Prasad Shingare, Yash Chaudhari
DOI Link: https://doi.org/10.22214/ijraset.2024.58066
Certificate: View Certificate
Abstract
A two-wheeled self-balancing robot is a classic example of inverted pendulum model. Exploring the realm of inverted pendulum systems, the two-wheeled self-balancing robot stands as a quintessential example, showcasing its inherent natural instability. In contemporary times, this system has emerged as a focal point of research, drawing attention for its extensive potential applications, ranging from Segway vehicles to enhanced wheelchairs and more efficient robotic designs. Within the scope of this project, a deliberate effort has been undertaken to confront and mitigate the inherent instability of the two-wheeled self-balancing robot through the implementation of a PID control system. This paper aims to carry out static structural analysis on the robot carrying maximum weight and subjected to road conditions. The robot model used in analysis is designed in SolidWorks and includes primary assembly. Analysis was performed in the Static Structural Suite of ANSYS Workbench.
Introduction
I. INTRODUCTION
The current focus on technological advancements centres around electronics, leading to the creation of efficient and smart machines. There is a growing desire for robots with smart thinking and decision-making capabilities, particularly in automating work processes. Two-wheeled self-balancing robots have gained popularity due to their potential applications in accident-free transportation, self-balancing wheelchairs, and compact robots for various industries. The challenges and diverse applications in this field motivated the choice of working on a two-wheeled self-balancing robot project.
The advent of commercial Segway vehicles has propelled the two-wheeled self-balancing robot into a prominent realm of exploration for researchers due to its extensive potential applications, including:
- Providing a safe and eco-friendly mode of local transportation, minimizing the risk of accidents.
- Developing self-balancing wheelchairs to enhance mobility for disabled individuals.
- Creating compact and efficient robots suitable for tasks in hotels, warehouses, and various other environments.
- Uncovering numerous other areas of application.
The manifold challenges posed by theses applications, coupled with the broad scope of possibilities offered by two wheeled self-balancing robots, served as primary impetus for selection of this projects.
II. CONCEPT OF STABILITY
A two-wheeled robot operates as an inverted pendulum system, relying on a control system to maintain stability. The robot's body acts as an inverted pendulum pivoted on the wheels' axis, requiring the center of mass to be directly above the axis. To prevent falling, the control system adjusts the wheel movement in the direction of the robot's tilt, applying opposing torque. The accuracy and responsiveness of the control system play a crucial role in achieving and maintaining stability based on factors like tilt angle, falling velocity, and direction of motion. The concept of stability in a self-balancing robot involves intricate sensor feedback systems and control algorithms that work seamlessly to counteract external forces and keep the robot in a balanced state. The concept of stability in a self-balancing robot signifies a harmonious synchronization of sensory input, computational algorithms, and mechanical responsiveness, collectively empowering the robot to maintain equilibrium in diverse and dynamic scenarios.
III. LITERATURE REVIVEW
The principle underpinning robot equilibrium hinges upon the inverted pendulum model, a paradigm extensively embraced by global designers and researchers. This model not only governs the creation of wheeled robots but extends its influence to diverse robotic forms, including legged counterparts. Scholars at the Industrial Electronics Laboratory, situated at the Swiss Federal Institute of Technology, have meticulously crafted a prototypical two-wheeled robot, leveraging a Digital Signal Processor for control. The implementation of a linear state space controller, utilizing data gleaned from gyroscope and motor encoder sensors, is instrumental in endowing this system with stabilization (Grasser et al., 2002). In the realm of commercially available robotics, the "SEGWAY HT," devised by the prolific Dean Kamen in 2001, stands as a testament to ingenuity.
With a portfolio boasting over 150 designed systems, encompassing climate control and helicopter innovations, Kamen's creation introduces an extra facet – the capacity to autonomously balance while a user stands atop and effortlessly traverse diverse terrains. Facilitated by five gyroscopes and a suite of additional tilt sensors, this robot maintains equilibrium with finesse. On a smaller scale, the Nbot, akin to its counterpart JOE, materialized under the expertise of David P. Anderson. Harnessing a commercially procurable inertial sensor and extracting position information from motor encoders, this robot clinched the prestigious NASA cool robot of the week accolade in 2003. Martins, R. S., and Nunes, F., undertook the development of the Bimbo robot, deploying it as a canvas to scrutinize the efficacy and performance nuances of varied control systems such as PID, pole placement, and adaptive control. Following a comprehensive evaluation of diverse controllers on Bimbo, the scholarly duo concluded that the pole placement methodology exhibits lackluster performance, while PID coupled with position control manifests commendable efficacy. In a parallel endeavor, Junfeng, W., and Wanying, Z., crafted intricate mathematical models rooted in LQR and pole placement. Subsequent simulation endeavors within MATLAB underscored the superiority of the LQR controller over its pole placement counterpart (Anderson, David P.; Grasser et al., 2002; Dean Kamen, 2001; Martins, R. S., and Nunes, F.; Junfeng, W., and Wanying, Z.).
IV. METHODOLOGY
Where every amazing project begins, with an initial concept forming in our minds. We envision the robot's movements, its purpose, and its potential. It's like sketching a dream on a blank canvas. Next, we bring that dream to life by designing and crafting the robot's hardware. We carefully select each electronic component, like picking vibrant paints for a masterpiece. Building the frame becomes our stage, where we meticulously position each piece, mindful of the robot's centre of gravity. This balance is crucial, the foundation upon which everything else rests. Now, we introduce the brain - the software algorithms. Through code, we teach the robot to sense its surroundings, understand its own tilt, and react accordingly. Just like a pup learning to walk, we patiently adjust control parameters (Kp, Ki, and Kd) like guiding hands, each tweak bringing us closer to our goal. Finally, the moment of truth! We unleash the robot into the world, not just balanced but free to move. Using a low-frequency remote control, we whisper instructions: forward, backward, left, right. Each successful manoeuvre is a joyous leap, each direction conquered a testament to our combined efforts.

V. MATERIAL PROPERTIES
Self-balancing Two-wheel robot contain many materials because they are required to safely perform in the face of a wide range of demanding conditions. Structural Steel is used in the Solid rods and rim, and the two sheets are made up of white acrylic material. The reason behind the use of the white acrylic is because it can withstand with high forces. Material properties such as density, Young's modulus, and Poisson's ratio are assigned to simulate the physical characteristics of each component accurately. Constraints and supports are defined to replicate real-world conditions, and loads are applied to mimic external forces. The careful selection and consideration of material properties in the design process contribute to the robot's ability to balance, respond to external forces, and maintain structural reliability under varying conditions, ultimately enhancing its overall effectiveness and longevity.
|
Material |
Density (kg/m3) |
Young’s Modulus (Gpa) |
Tensile Yield Strength (Mpa) |
Compressive Yield Strength (Mpa) |
Poisson’s Ratio |
|
Structural Steel |
7850 |
210 |
250 |
250 |
0.3 |
|
High Carbon Steel |
7850 |
220 |
275 |
415 |
0.28 |
|
White Acrylic Sheet |
1190 |
3.2 |
75 |
170 |
0.37 |
VI. MODELLING
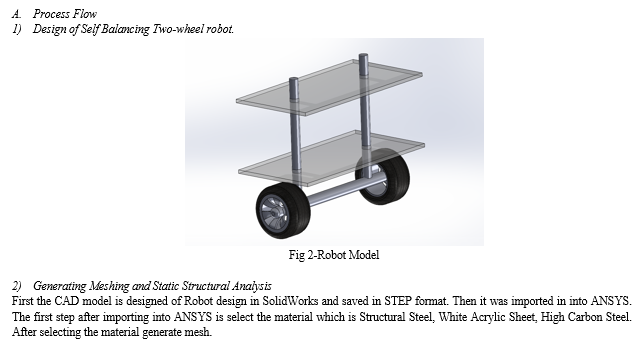
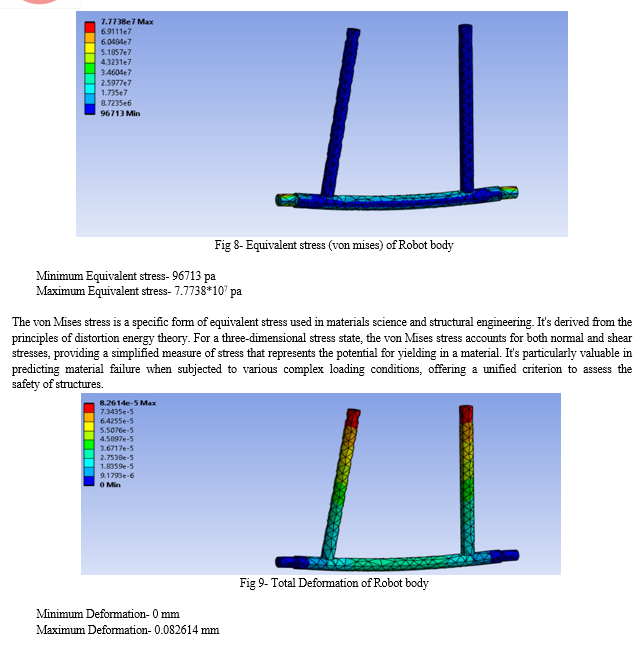
The Self Balancing two-wheel robot was modelled by using the SOLIDWORKS software considering the dimensions of an acrylic sheet and length and diameter of the rod and shaft. Static structural analysis is carried out by using ANSYS Software By this software we will analyse the two important parts of robot (Robot body and acrylic sheet). This Software is used to find out Equivalent stress (von mises) of Plate of an acrylic sheet and Robot body. The amount of Equivalent stress (von mises) will depend on the material and complexity of assembly. Modelling a self-balancing two-wheeled robot involves the creation of a detailed virtual representation of the robot's physical structure and components. Initially, a 3D model is developed, encompassing the frame, wheels, motors, sensors, and other relevant parts.


VIII. ACKNOWLEDGEMENT
We express our sincere gratitude to the dedicated individuals who contributed to the development of the two-wheeled self-balancing robot and the completion of this research paper. Special thanks to our esteemed team members, whose diverse skills and relentless commitment were instrumental in overcoming challenges and achieving significant milestones. Their collaboration fostered an environment of innovation and efficiency throughout the project. We also acknowledge the guidance and mentorship provided by Dr.M.M. Sayyad, whose insights greatly enriched the quality of our work. Their expertise and encouragement shaped our approach and methodology. This acknowledgment reflects the collective efforts, collaboration, and support that fuelled the success of this research endeavour. Together, we have not only advanced the field of robotics but also strengthened the bonds within our research community. We look forward to further exploration and advancements in this dynamic field.
Conclusion
The Static Structural Analysis of the Self Balancing Robot in real word working condition has been performed and with comparison by defining the different parameters have completed successfully. This analysis aids in ensuring that the self-balancing robot can withstand operational forces and environmental conditions, contributing to its overall functionality and safety. The structural analysis of a self-balancing robot through ANSYS not only ensures mechanical robustness but also plays a pivotal role in the holistic design process. By identifying potential weaknesses, stress concentrations, and deformations, engineers can iteratively refine the structure to enhance efficiency and minimize the risk of structural failure. This comprehensive evaluation contributes to the overall success of the self-balancing robot, aligning it with performance goals, safety standards, and the demands of its intended application. 1) The optimized design approach provides a feasible design for the applied loading conditions and stands out to be efficient design especially at higher loads. 2) White acrylic material is more sustainable for carrying the high weight over the glass material.
References
[1] Juang, H. S., Lum, K. Y., “Design and control of a two-wheel self-balancing robot using the Arduino microcontroller board”, 2013. IEEE, 10th International Conference, Control and Automation (ICCA), China. [2] Junoh, S. A. B., “Two-wheeled balancing robot controller designed using PID”, 2015. University Tun Hussein Onn, Malaysia. [3] Padhan, M. K., “Fabrication, balancing and analysis of two wheeled robot”, 2015. National institute of technology, Rourkela, Odisha [4] Martins, R. S., Nunes, F., “Control system for a self-balancing robot”, 2017.International conference, University of Algarve, Faro, Portugal. [5] “Impact of Mesh Quality Parameters on Elements Such as Beam, Shell And 3D Solid” in Structural Analysis Padmakar Raut (Department of Mechanical Engineering, Mumbai University, Mumbai-400614). [6] Desai, Utkarsh M.; Patel, Dhawal A. (2015): “Modelling and stress analysis of composite material” under static loading condition. IJAPME
Copyright
Copyright © 2024 Dr. M. M. Sayyad, Shantanu Nalawade, Jay Palkar, Prasad Shingare, Yash Chaudhari. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58066
Publish Date : 2024-01-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online