

Ijraset Journal For Research in Applied Science and Engineering Technology
Terrain-Vechicle Traction Control Parameters for Tracked-Robot
Authors: Ms. N. Krishnaveni, S. Shivanath , Karanki Ashok, Rageer Ruchit Goud, Syed Rehan
DOI Link: https://doi.org/10.22214/ijraset.2024.61346
Certificate: View Certificate
Abstract
Here we have the systems of :- 1) Advancements in Vehicle Control :- This summary highlights two recent advancements in vehicle control technology which are the enhanced Handling for Passenger Cars: Researchers have developed a novel control system inspired by expert driver techniques. This system optimizes a car\'s handling during maneuvers requiring simultaneous acceleration and sharp turns. Simulation testing demonstrates significant performance improvements. Improved Unmanned Ground Vehicle (UGV) Operation on Unstructured Terrain: A new approach addresses the challenges of controlling UGVs on rough terrain. The solution combines sensor fusion for terrain characterization, a neural network for terrain classification, and an adaptive control system for real-time stability adjustments. This multi-pronged approach has been validated through successful experimentation on a UGV platform. 2) Enhancing UGV Control with Haptic Feedback :- A separate study explores the use of haptic feedback to improve UGV control in difficult environments. Traditional operator interfaces often lack sufficient sensory information, leading to reduced situational awareness and operational difficulties. This research proposes a haptic tablet interface that provides the operator with a tactile sense of the UGV\'s traction state. User studies confirm that this approach significantly reduces the time a UGV spends immobilized due to traction loss. These advancements collectively represent significant progress in vehicle control technology, with potential benefits for both manned and unmanned vehicles operating in challenging scenarios.
Introduction
I. INTRODUCTION
Here's a more professional version of the explanation:
This passage highlights the challenges associated with controlling unmanned tracked vehicles in dynamic environments characterized by variable terrain.
- Control Challenges in Diverse Terrain: The authors emphasize the need for adaptable planning and control algorithms due to the wide range of terrains encountered by unmanned tracked vehicles.
- Leveraging Established Models: Existing kinematic, dynamic, and track-terrain interaction models can provide a foundation for traction control and power management strategies, particularly for mission-critical application.
- Gap in Real-Time Control Algorithms: Recent research by Broderick et al. (2013), Fink and Stump (2014), Prado et al. (2018), and others underscores the critical need for improved traction and trajectory control algorithms. Notably, a gap exists in developing online or real-time estimation methods for these algorithms.
- Limited Terrain Data and Performance: The accuracy of models used to predict vehicle-terrain interaction and resulting forces and deformations is hampered by the scarcity of fundamental terrain data, particularly regarding soil characteristics (LeSage and Longoria, 2013, 2014; 2016).
- Soil Parameters and Vehicle Performance: Soil parameters such as cohesion, shearing resistance, and shear modulus are crucial for assessing vehicle mobility and trafficability (terrain negotiation capability) within these models (Wong, 2008).
- Focus of the Research: This paper revisits prior efforts to estimate slip and friction coefficients, which can then be leveraged to infer specific soil parameters for mobility and trafficability models (Dar and Longoria, 2010b,a).
- Importance of Onboard Sensors: The research places a particular emphasis on utilizing onboard sensors readily available on robotic tracked vehicles, especially when operating on deformable terrain.
In essence, the passage underscores the need for enhanced online estimation methods for controlling unmanned tracked vehicles across diverse terrains. This research explores using onboard sensors to estimate critical soil properties for improved vehicle performance.
II. VEHICLE-TERRAIN PARAMETER ESTIMATION
This section introduces a functional teleoperation architecture designed to enhance user experience and situational awareness (SA) in unmanned ground vehicle (UGV) control. The system integrates three key components :
Sensor-equipped Tracked UGV: This platform provides fundamental odometry data for navigation and obstacle detection via a laser rangefinder.Advanced Traction Detection Module: This innovative module differentiates between various traction loss scenarios (complete immobilization and slippage) encountered by the UGV during operation.
*Haptic Tablet Interface: Replacing the traditional gamepad, this interface offers dual functionalities:
* Control of UGV movement with two degrees of freedom.
* Transmission of UGV traction state through diverse tactile feedback mechanisms.
The authors implemented this architecture on RAPOSA-NG, a UGV specifically designed for search and rescue operations. However, they emphasize the broader applicability of this system across various UGV teleoperation domains.
Following this introduction, the paper delves deeper into the functionalities of RAPOSA-NG and its original control method using a gamepad. It highlights the limitations of the gamepad in conveying the UGV's traction state, which led to user misinterpretations of the vehicle's behavior as communication errors or hardware malfunctions. The newly developed traction detection module directly addresses this challenge by providing explicit feedback on traction loss, thereby enhancing operator SA.
III. THEORETICAL METHODS
This section delves into the critical functionality of identifying and classifying traction loss scenarios encountered by the unmanned ground vehicle (UGV) during operation. Precise knowledge of the UGV's traction state is paramount for maintaining effective control and ensuring the operator's situational awareness (SA).
A. Common Traction Loss Scenarios
Physical Obstructions:Obstacles that impede the UGV's forward progress or elevate its chassis, causing a loss of contact between the tracks and the ground.
*Slopes and Inclines:* In less frequent situations, the UGV may experience traction loss while traversing slippery inclines, leading to sliding.
B. Improving Operator Awareness with Haptic Feedback
To bolster the operator's understanding of the UGV's traction state during teleoperation, the system incorporates haptic feedback mechanisms. This feedback is directly tied to the output of a dedicated traction state classification module, as detailed in [8].
C. Traction State Classification Method
The core principle of this method lies in comparing the anticipated motion, as calculated by the UGV's tracked wheel odometry (data from wheel encoders), with the actual motion measured by laser-based odometry (utilizing a laser rangefinder). Any significant disparity between these readings serves as a reliable indicator of potential traction loss.
D. Traction State Categories:
- Normal: In the absence of control commands, the UGV remains stationary, and vice versa (motion is mirrored by both odometry systems).
- Stuck: The UGV's tracks indicate movement based on odometry data, while the laser-based odometry suggests no actual movement. This signifies that the UGV is stuck (e.g., wheels spinning on loose terrain).
- Sliding: Both the tracked wheel odometry and laser odometry detect movement, but the directions diverge. This scenario implies that the UGV is sliding (e.g., down a slope due to insufficient traction).
E. Communicating Traction State to the Operator
Upon successful classification of the traction state, the system employs various tactile feedback mechanisms to convey this information to the operator. Prior research ([8]) has demonstrably proven the efficacy of haptic feedback in enhancing the operator's comprehension of the UGV's traction state compared to relying solely on visual cues. Previous implementations have explored vibration (through a vibrotactile glove) and friction (via a rotating cylinder) to represent different traction conditions.
F. Prior Limitation
In earlier iterations, the integration of this system (named E-Vita) within RAPOSA-NG's teleoperation architecture was limited to providing the operator with traction feedback only. Control of the UGV was not possible through this interface. ## E-Vita: A Multimodal Haptic Interface for Teleoperation
This section delves into the technical specifications and integration of E-Vita, a multimodal haptic tablet designed to enhance the teleoperation experience for unmanned ground vehicles (UGVs).
G. E-Vita's Functionality
E-Vita offers a unique user experience by generating tactile feedback on the operator's fingertips as they interact with the device's surface. This is achieved through a combination of innovative technologies:
- Ultrasonic Actuation: By employing piezoelectric actuators vibrating at ultrasonic frequencies (inaudible to humans), E-Vita modulates friction between the user's finger and a glass plate. This modulation creates a tangible response that can be perceived by the operator.
- High-Resolution Finger Tracking: An integrated capacitive touch sensor precisely tracks finger position across the glass plate, enabling accurate control over the tactile experience.
H. System Architecture and Control:
E-Vita utilizes a single-board computer to manage both visual feedback presented on an LCD display and the haptic feedback generated by the ultrasonic actuators. To guarantee high-fidelity tactile rendering, a dedicated framework named TextureControl ensures precise vibration modulation that dynamically adapts to the user's finger movements. This framework operates at a high sampling rate to maintain optimal haptic fidelity, independent of the touch screen's inherent limitations.
I. Integration with Teleoperation System:
E-Vita seamlessly integrates with the teleoperation system using the Robot Operating System (ROS) platform. This robust communication framework facilitates data exchange between various components:
Web-socket Protocol: This protocol enables real-time, bidirectional communication between RAPOSA-NG (the UGV) and E-Vita, ensuring a constant flow of information.
Ethernet Connection: A wired ethernet connection establishes a reliable and high-bandwidth link between E-Vita and the teleoperation PC, minimizing latency and potential disruptions.
J. Operator Interface with E-Vita:
E-Vita acts as a bilateral interface, empowering the operator with two key functionalities:
- UGV Control: E-Vita allows for intuitive control of the UGV's movement (detailed in Section III-B2).
- Haptic Traction Feedback: E-Vita transmits critical information about the UGV's traction state through distinct tactile experiences (elaborated upon in Section III-B3).
K. Overall System Architecture:
- The UGV itself.
- The laser-based traction detection module responsible for identifying traction loss scenarios.
- The haptic tablet (E-Vita) serving as the primary interface for UGV control and traction state feedback.
IV. EXPERIMENTAL METHOD
Experimental Validation: Traction Detection Through Feature Extraction
This section details the meticulously designed experiment and subsequent feature extraction process undertaken to validate the efficacy of the proposed traction detection method. A ROS-based unmanned ground vehicle (UGV) serves as the test platform for this evaluation.
A. Experimental Design
The experimental validation adheres to the following key elements:
- UGV Platform: A UGV operating within the Robot Operating System (ROS) framework is employed as the primary testing platform.
- Diverse Terrains: The UGV is systematically operated on four distinct road surfaces with varying levels of complexity: asphalt, short grass, tall grass, and sandy terrain (refer to Figure 7 for visual illustrations).
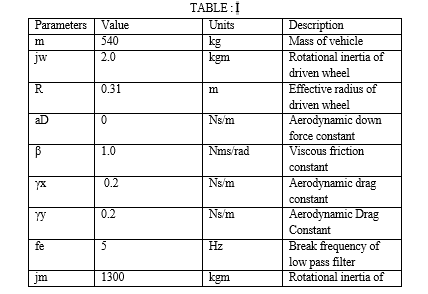
- UGV Specifications: Table 1 (not included here) meticulously documents the UGV's critical parameters, encompassing its self-weight, maximum achievable speed, physical dimensions, motor type, wheel material composition, and controller details.
B. Data Acquisition:
Sensor Recordings: Throughout the operation on each terrain, the UGV's traveling speed and attitude angles are meticulously recorded at regular intervals. This continuous data stream serves as the foundation for subsequent feature extraction.
C. Feature Extraction from Sensor Measurements:
- A thorough analysis is conducted on the collected sensor data, specifically focusing on the variations observed in the UGV's speed and attitude angles while traversing the different test surfaces.
- This analysis reveals significant discrepancies in these measurements across the diverse terrains. summarizes the features successfully extracted from the sensor information. These features will be strategically employed as input parameters for a neural network, which is likely to be utilized in the subsequent stages of the research to classify the UGV's traction state based on the extracted characteristics.
- Within fuzzy control systems, input and output variables are characterized by membership functions. These functions mathematically represent the degree of membership for a specific value within a fuzzy set.
- Fuzzy sets, unlike classical sets with crisp boundaries, encompass concepts that are inherently imprecise or possess gradual transitions.
- The passage describes the use of membership functions in a fuzzy control system for motor speed. Here, triangular membership functions are employed to represent the fuzzy sets for speed error (e) and its rate of change (ec).
- Triangular membership functions are a common choice due to their simplicity and ease of computation. These functions typically take the form of triangles, where the base spans the range of values for the fuzzy set and the peak signifies the most typical value within that set.
- By leveraging membership functions, the fuzzy control system can handle imprecise data associated with speed error and rate of change. This enables the system to make control decisions based on human-like reasoning, incorporating concepts like "negative small" error or a "moderately increasing" rate of change, rather than relying solely on exact numerical values.
- This approach offers advantages in situations where precise measurements may be challenging or where human intuition plays a role in effective control.
V. RESULTS AND DISCUSSION
The document evaluates a neural network system for road type classification in an unmanned vehicle. Here's a more professional summary:
A. Performance Evaluation
The system underwent multiple test runs, with outcomes depicted in Figure 11. Each data point represents the recognition accuracy for a specific road category across various runs. The symbols "+" and "-" indicate instances of misclassification into or out of that category, respectively.
B. Key Findings:
- High Grass: The system effectively distinguished high grass due to its pronounced fluctuation characteristics, significantly impacting vehicle dynamics (bumps).
- Short Grass: Successful differentiation was achieved for short grass due to its distinct, albeit subtle, turbulence characteristics.
- Sand vs Asphalt: Slight confusion arose between sand and asphalt roads due to their minimal surface variations.
The system leverages the inherent difference in tire adhesion caused by the softer sand material This error falls within an acceptable range, maintaining an overall recognition rate exceeding 98%, deemed sufficient for robust control algorithms.
C. Bench-marking:
- The proposed method utilizes nine characteristic parameters (roll/pitch angles, motor speeds) as neural network inputs.
- This approach exhibits superior anti-interference performance compared to methods referenced in [14-17].
- It achieves a commendable recognition accuracy of 98%, surpassing existing methods.
- While reference [17] identifies a wider range of road categories (6), it lacks the ability to differentiate subtle variations like slightly undulating sandy pavement.
- Reference [16] can recognize nine categories, including sand, but relies on pre-defined road attributes and achieves a lower accuracy of only 80%. Additionally, selecting appropriate on-board sensors for information extraction in this method poses a challenge.
In conclusion, the neural network system demonstrates promising potential for road type classification in autonomous vehicles. It achieves exceptional accuracy, effectively handles diverse terrains, and offers advantages like enhanced anti-interference capability compared to existing methods. This paves the way for its integration into robust control systems for unmanned vehicles.
This research investigates the application of adaptive PID control for improved stability in unmanned vehicles navigating diverse road conditions.
The study employs an experimental vehicle and compares the performance of a traditional, fixed-parameter PID control system with a newly proposed adaptive PID algorithm. The original PID parameters were obtained through the well-established Ziegler-Nichols method, demonstrating efficacy on structured asphalt pavement. However, its performance deteriorates on unstructured terrains due to its inability to adapt to varying road characteristics.
The adaptive PID algorithm introduced in this paper addresses this limitation. It dynamically adjusts the PID control parameters in real-time based on the current road surface the vehicle encounters. This allows for superior stability in terms of both speed and motor current (torque) on uneven surfaces like short grass, high grass, and sandy roads. While the adaptive PID might have a slightly slower response time compared to the original PID on smooth roads, the trade-off is significant improvement in handling variations in terrain.
The experimental results confirm the effectiveness of the adaptive PID approach. The study demonstrates a reduction in speed and current fluctuations on uneven terrains compared to the original PID control. This translates to enhanced vehicle stability and potentially smoother operation over various road conditions.
VI. ACKNOWLEDGMENT
The experimental data was collected on the use of Haptic Tablets for UGV Teleoperation in Unstructured Environments: System Design and Evaluation ,Road Recognition and Stability Control for Unmanned Ground Vehicles on Complex Terrain,Adaptive vehicle traction control: combined longitudinal and lateral motion,rametersfromtracked-robotsensordata
Conclusion
A. Enhancing Unmanned Vehicle Performance through Traction Control :- This study investigates novel traction control algorithms for unmanned vehicles, aiming to maximize both longitudinal (forward) and lateral (sideways) acceleration. The research offers significant contributions in two key areas: B. Performance-Oriented Control Algorithms: Two control algorithms are proposed: 1) Indirect Adaptation: This method prioritizes overall vehicle performance, potentially excelling in maximizing total acceleration. 2) Direct Adaptation: This approach focuses on controlling individual wheel forces, potentially preventing excessive tire slippage in specific wheels. Both algorithms demonstrate effectiveness in maximizing either overall acceleration or individual tire forces. C. Road Type Identification and Adaptive Control System: 1) Sensor Fusion: To overcome limitations of single sensors, the system employs a sensor fusion approach. It combines data from gyroscope sensors (measuring vehicle tilt) and motor encoders (measuring wheel speed) to identify various road types (rough terrain, sandy surfaces) with high accuracy (98%). 2) Multi-Loop Adaptive PID Control: A multi-loop adaptive Proportional-Integral-Derivative (PID) control system is implemented. This system utilizes nested loops: 3) The outer loop (speed loop) with a fuzzy PID algorithm regulates overall vehicle speed.The inner loop (torque/current loop) with a segmented PID algorithm adjusts power delivery to maintain stability on different terrains. The effectiveness of this combined approach for controlling unmanned vehicles on unstructured roads is validated through experimentation. D. Significance and Future Implications: This research addresses a critical challenge in unmanned vehicle control, particularly relevant for applications in smart agriculture and military domains where unstructured roads are prevalent. The proposed control algorithms and road identification methods offer a foundation for further development of robust motion control strategies for unmanned vehicles operating in diverse environments.
References
[1] Whitson J A, Gorsich D, Vantsevich V V, et al. Military Unmanned Ground Vehicle Maneuver: A Review and Formulation [J]. 2023. [2] Kim J, Kim S, Ju C, et al. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications [J]. Ieee Access, 2019. [3] Benny A, Nauman A, McCoy M (2003) Technical Note: Traction Control TNAU0001. [4] Hsu YHJ,LawsSM,GerdesJC(2010)Estimationoftireslipangle and friction limits using steering tourqe. [5] Leondes CT (1973) Control and dynamic systems: advances in theory and applications., Control Dyn Syst Adv Theory Appl. [6] Johnson C (Dec 1971) Accomodation of external disturbances in linear regulatorandservomechanismproblems.IEEETransAutom Control.
Copyright
Copyright © 2024 Ms. N. Krishnaveni, S. Shivanath , Karanki Ashok, Rageer Ruchit Goud, Syed Rehan. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61346
Publish Date : 2024-04-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online