

Ijraset Journal For Research in Applied Science and Engineering Technology
Tourist Guide Robot
Authors: Merwyn Pillay, Sara Gadhave, Ankita Bind, Shrey Ruparel, Lata Upadhye
DOI Link: https://doi.org/10.22214/ijraset.2024.59569
Certificate: View Certificate
Abstract
Recently, robots have entered the Tourist request. However, due to the ocean between inventors and guests, the power train for commercialising the robots has yet to be prepared. therefore, In this study, we provide a tool for u-intelligent tourist robots that allows guests to build robot contents fluently. To accomplish this, our tool has a number of functions. First, the tool is built on a gesture-based control armature for human-robot trade. Second, the programme includes geste orders for convenience. Eventually, robot content is based on marketable multimedia to compete with established tourism material. Physical execution of marketable tourist robots validates the effectiveness and usefulness of our tools.
Introduction
I. INTRODUCTION
In the ever-changing landscape of tourism, innovation is constantly reshaping the traveller’s experience. One such innovative advancement creating waves in the industry is the incorporation of robotics into hospitality and tourism services. As these robotic assistants become more common, bridging the gap between inventors and users becomes critical to their wider commercialization. However, the problem is to quickly design and implement robot content that smoothly blends into the visitor experience. To address this difficulty square on, we provide a ground breaking technology designed exclusively for the production of u-intelligent Tourist robots, as demonstrated by our robot Taurus. This platform is a huge step forward in allowing inventors and guests to collaborate on creating compelling and immersive robot experiences, regardless of geographical obstacles. Our tool's foundation on a revolutionary concept called the Gesté-Grounded Control Armature for Mortal-Robot-Commerce is essential to its effectiveness. This framework offers a solid foundation for building the features and communications between Taurus and other tourism robots, guaranteeing consistency and pertinence to the visitor experience.
Moreover, our solution features user-friendly Gesté commands that streamline the process of creating and executing robot content for both producers and consumers. Through the utilisation of this intuitive interface, creators may convert their concepts into practical instructions for Taurus, improving productivity and ease of use when creating material. Most importantly, the information produced by our platform is both commercially viable and easy to use. The robot material is based on marketable multimedia formats and easily conforms to established standards for tourism content, making it suitable and appealing to a broad audience. Our tool's usefulness and efficacy are further confirmed by actual application for commercially viable tourism robots such as Taurus. Through the integration of cutting-edge technology, user-focused design, and commercial feasibility, our product opens the door to a novel age of accessible and immersive tourism experiences driven by intelligent robotic aides.
II. LITERATURE REVIEW
Rosa demonstrates and analyses the development and deployment of a tour guide robot as part of the 5 g-TOURS EU research project, which aims to develop 5G-enabled applications in a variety of use scenarios. The goal is to create an autonomous robotic application in which intelligence is offloaded to a remote machine via a 5G network, alleviating the majority of the computing load on the robot itself. The programme employs components that have been extensively researched in robotics (location, mapping, planning, and interaction).
However, the network's peculiarities and interactions with visitors in the wild create unique difficulties that must be addressed. The report summarises methodological and experimental results, and describes the system's overall functional architecture, including navigation and operational services. The software implementation is also publicly available.[1]
This study profiles and segments potential tourists based on their differing opinions towards artificial intelligence (AI) services. Furthermore, this study distinguishes descriptors among the different clusters, such as the preference for using diverse AI services, the overall image of AI services, the willingness to use AI services (WUAI), the willingness to pay more for AI services (WPAI) in tourism and hospitality, and respondents' characteristics.[2]
This paper discusses the software architecture of the autonomous mobile tour-guide robot RHINO, which took hundreds of visitors through the exhibition of the "Deutsches Museum Bonn" over a six-day period and engaged with them in a variety of ways. The robot's control software combines low-level probabilistic reasoning and high-level problem solving using first-order logic. This work describes a set of innovative strategies that allow the robot to move at high speeds through dense crowds while successfully avoiding collisions with impediments, some of which cannot even be sensed. This study also describes a user interface designed for non-expert users, which encouraged interaction with museum users while also allowing Web users to become virtual museum visitors.[3]
III. METHODOLOGY
Therefore, we'll begin with this AI speech bot device called "TAURUS" that is specifically designed for educational purposes. It can also be used for a variety of additional reasons, including entertainment, daily use, and much more. This technology is quite complicated internally, yet it is also very user-friendly for anyone who uses it. So, in the following sections, we will go over the entire circuitry, major components, and the device's many functions.
A. Hardware and Software
So, in the software structure of this gadget, we used the Python programming language and Arduino ide programming to integrate it into the tackle armature, which is similar to Arduino and Raspberry Pi. So, in the tackle section, we used an Arduino, a Raspberry Pi, a radio module, a Bluetooth module, a touch screen display, and speakers. So, the circuitry for the moving system, which we used to build the robot's movement system, is shown below.
- Transmitter Circuit for the Moving System
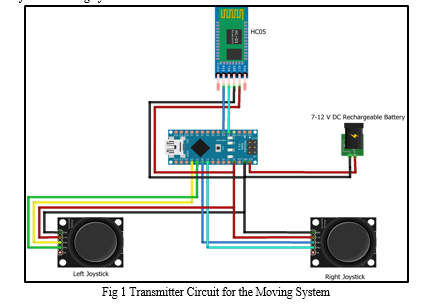
The development of transmitter circuits for remote-controlled moving systems has made great progress, serving a wide range of applications from robotics to unmanned vehicles. Components such as joysticks, Arduino Uno microcontrollers, HC-05 Bluetooth modules, and rechargeable batteries are rapidly being integrated into such systems, improving their utility and versatility. Joysticks function as intuitive input devices, allowing for precise control over movement parameters. Arduino Uno, with its rich development environment and broad community support, provides a versatile platform for interfacing and processing joystick inputs, allowing for smooth interface with other system components. The installation of HC-05 Bluetooth modules allows for wireless communication, improving operational range and reducing the limitations imposed by physical connections. Furthermore, the use of rechargeable batteries not only improves portability but also contributes to sustainability by reducing reliance on disposable power sources
2. Receiver Circuit for the Moving System
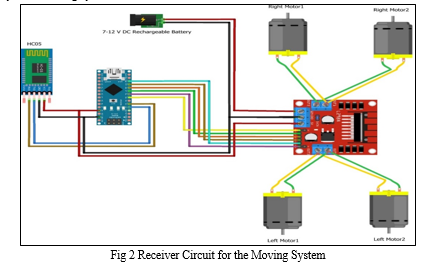
The development of receiver circuits for moving systems has been critical in enabling accurate and responsive control over locomotion in a variety of applications, including robotics and unmanned vehicles. The L298N motor driver, Arduino Uno microcontroller, HC-05 Bluetooth module, and rechargeable batteries are all key components in this innovation. The L298N motor driver acts as a reliable interface between the Arduino Uno and the DC motors, providing bidirectional control and current regulation required for peak motor performance. With the Arduino Uno's diverse programming capabilities, this combination allows for easy integration and exact control over motor outputs. The HC-05 Bluetooth module facilitates wireless contact with the transmitter, establishing a dependable link for delivering control signals from the master to the slave unit. Furthermore, the usage of rechargeable batteries provides portability while also promoting sustainability by reducing environmental effect. The receiver circuit, as the slave unit, works in tandem with the transmitter to execute commands and translate them into physical motion via the linked DC motors. Ongoing research focuses on improving receiver circuit efficiency, dependability, and responsiveness, addressing issues such as signal latency, power consumption optimisation, and robustness under a variety of operating circumstances.
3. Python Code
Voice-controlled assistants have grown in popularity in modern computing environments, allowing users to communicate with digital systems in an easy and hands-free manner. This trend is represented by Python-based implementations such as the one shown here. These assistants, which incorporate technologies such as speech recognition, web scraping, and application control, offer a diverse platform for accessing information and doing activities via natural language instructions. Using libraries such as Speech Recognition and Pyttsx3, developers can enable bidirectional connection between people and software, allowing for seamless voice input and synthesised speech output. Furthermore, the addition of external APIs for site scraping, as well as modules like BeautifulSoup, expands the assistant's capabilities by allowing real-time data extraction from online sources such as weather predictions and search engine results. Additional features include music playback control and application launching, and time reporting showcase the assistant's utility in managing various aspects of users' digital experiences. As these voice-controlled assistants continue to evolve, driven by advancements in natural language processing and machine learning, they hold promise in reshaping human-computer interaction paradigms, offering more personalized and accessible computing experiences.
B. Features of Robot
Thus, the main aspects that make this device such a great bone are that it's a vocal bot that will listen to any questions you have and provide a tailored response. It can perform a variety of comparable tasks, such as recognising you and initiating operation whenever you turn on or activate the device. Therefore, you can utilise it for a variety of purposes. For example, you can ask Taurus, "Taurus, can you tell me about this place or thing or a person?" and it will provide you with all the knowledge you need to know about any person, event, thing, or place. The attributes are incoherent Yes, you can request that he play a song, and you can end the videotape or increase and drop the volume or indeed close apps and tabs. Isn't it fantastic. You can also get information on the temperature, rainfall, date, and timings. Because we have included a translator in this device, it can also serve to boost the tourism industry. So, if you travel to a town or destination and don't know the native language, you can just ask the question in the language you're most comfortable with, and it will restate it in any language of your choice. One of its key characteristics is that you can boost and decrease the loudness with hand movements. It does have a face discovery feature, so wherever you keep the gadget, it will recognise your face and move its head,like its looking you. like if you keep it on the table and your standing also if will detect your face and move it's head above the talk to you. The main thing which makes it user friendly is that it's a moving device controlled by Bluetooth. you can take anywhere and everywhere with you.
IV. CHALLENGES AND FUTRE DIRECTIONS
While creating this voice-controlled assistant has been a gratifying experience, it has not been without hurdles. One of the key problems was assuring robustness and accuracy in speech recognition across a variety of user situations and dialects. Future research in this field could concentrate on applying advanced machine learning techniques to increase recognition accuracy and flexibility. Furthermore, because we envision this project being used in a variety of situations, including tourism, addressing the specific issues of such applications is critical. For example, creating a tourist robot that can navigate complicated places autonomously while offering instructive and interesting interactions has major technical and logistical obstacles. Future study could look into improving navigation capabilities, including multi-modal interaction modalities, and optimising user engagement tactics. Looking forward, we feel that voice-controlled assistants have enormous potential to reshape human-computer interaction paradigms, providing personalised and intuitive computing experiences. As a result, future initiatives will continue to focus on improving the capabilities and usability of such assistants, with the ultimate goal of enriching users' lives across multiple areas.
V. ACKNOWLEDGMENT
This Research and Development will help in the Tourism Field to make it futuristic and on the hand makes the teaching and learning experience more simplier and entertaing and learning new languages. We would like to express our sincere gratitude to all those who have contributed to the development and realization of this voice-controlled assistant project. First and foremost, we extend our heartfelt thanks to the whole team, whose dedication and expertise were instrumental in every phase of the project, from conceptualization to implementation. Their tireless efforts in coding, testing, and refining the software have been invaluable.
Conclusion
Finally, the development of our voice-controlled assistant represents a huge step forward in human-computer interaction, providing users with a simple and straightforward way to obtain information and conduct activities using natural language commands. We developed a dynamic platform capable of responding to a wide range of user queries and requests by combining cutting-edge technologies such as speech recognition, web scraping, and application control. Despite the hurdles encountered throughout the development process, such as guaranteeing powerful speech recognition and meeting the special requirements of applications such as tourism, our team\'s dedication and joint efforts resulted in a comprehensive and feature-rich assistant. Looking ahead, we see opportunities for more developments in voice-controlled assistants, particularly in the tourism sector. Addressing difficulties such as we can pave the path for the adoption of virtual assistants in a variety of real-world circumstances by improving user engagement through multimodal interactions in complicated environments. Finally, our research demonstrates the revolutionary power of voice-controlled assistants in transforming how humans interact with technology. As we continue to develop and innovate on this technology, we remain committed to providing more personalized, accessible, and enriching computing experiences to users globally.
References
[1] Rosa, Stefano, et al. \"Tour guide robot: a 5G-enabled robot museum guide.\" Frontiers in Robotics and AI 10 (2023). M. Kathirvelu, A. Janaranjani, A. T. Navin Pranav and R. Pradeep, \"Voice Recognition Chat bot for Consumer Product Applications,\" 2022 IEEE International Conference on Data Science and Information System (ICDSIS), Hassan, India, 2022, pp. 1-5, doi: 10.1109/ICDSIS55133.2022.9915884. [2] V. Narkhede, O. Surushe, S. Kulkarni, H. Solanki, T. Ekbote and D. Joshi, \"AVA: A Photorealistic AI Bot for Human-like Interaction and Extended Reality,\" 2023 International Conference on Communication System, Computing and IT Applications (CSCITA), Mumbai, India, 2023, pp. 5-9, doi: 10.1109/CSCITA55725.2023.10104672. [3] Tellez et al., \"An Assure AI Bot (AAAI bot),\" 2022 International Symposium on Networks, Computers and Communications (ISNCC), Shenzhen, China, 2022, pp. 1-5, doi: 10.1109/ISNCC55209.2022.9851759. [4] S. J. du Preez, M. Lall and S. Sinha, \"An intelligent web-based voice chat bot,\" IEEE EUROCON 2009, St. Petersburg, Russia, 2009, pp. 386- 391, doi: .1109/EURCON.2009.5167660. [5] R. Amigoni, A. Arzeno, N. Basilico, G. Fontana, and F. Schiaffonati, \"Tourist guide robots: an overview of hardware and software architecture,\" IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 2009, pp. 1448-1453, doi: 10.1109/ROBOT.2009.5152346. [6] H. Ishiguro, S. Nishio, M. Kanda, T. Ishida, and T. Ono, \"Robovie-IV: a communication robot interacting with humans,\" IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 2007, pp. 1609-1615, doi: 10.1109/IROS.2007.4399374. [7] K. Saito, R. Sato, and K. Tanie, \"Development of a humanoid robot for museum guide,\" IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 2003, pp. 2609-2614, doi: 10.1109/IROS.2003.1248982. [8] M. K. Habib and S. Hossain, \"Development of an intelligent tourist guide robot using IoT,\" IEEE Region 10 Symposium (TENSYMP), Dhaka, Bangladesh, 2017, pp. 1-6, doi: 10.1109/TENCONSpring.2017.8070041. [9] T. Yamanobe, M. Nakagawa, and T. Matsui, \"Development of an interactive robot system using sign language for communication with hearing impaired people in a public facility,\" IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 2008, pp. 3491-3496, doi: 10.1109/IROS.2008.4651106. [10] C. Schlick, M. L. Wolf, and D. Braun, \"Towards autonomous tourist guidance: the interactive robot head hanson\", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 2011, pp. 3153-3159, doi: 10.1109/IROS.2011.6094892.
Copyright
Copyright © 2024 Merwyn Pillay, Sara Gadhave, Ankita Bind, Shrey Ruparel, Lata Upadhye. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59569
Publish Date : 2024-03-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online