

Ijraset Journal For Research in Applied Science and Engineering Technology
Towards Precision Navigation: Curved lane Detection System in Vehicles
Authors: Shipra Singh, Shivani Mishra, Dr. Sadhana Rana
DOI Link: https://doi.org/10.22214/ijraset.2024.61268
Certificate: View Certificate
Abstract
Curved lane detection is a critical component of advanced driver assistance systems (ADAS) and autonomous vehicles, playing a pivotal role in ensuring safe and efficient navigation on complex roadways. In the pursuit of enhancing accuracy and expediting processing speed in road lane detection, researchers have proposed numerous methodologies. Despite these efforts, several challenges persist, including variations in lane markings, fluctuations in lighting conditions, and the emergence of shadows. Addressing these obstacles is crucial for establishing dependable lane detection systems. The curve lane detection algorithm exhibits a robust performance, as evidenced by the experimental results, which consistently reveal a notably high success rate in accurately identifying and delineating curved lanes.
Introduction
I. INTRODUCTION
Curved lane detection, a pivotal component of autonomous driving perception technology, holds significant sway over the vehicle's trajectory on curved paths and is instrumental in ensuring safe autonomous driving experiences. The development of autonomous vehicles is crucial for ensuring the safety of both drivers and passengers. Traffic accidents can occur due to various factors, with a significant number stemming from improper speeds, sudden lane changes to avoid obstacles, or unexpected turns [4]. Instances of accidents during test drives underscore the imperative need for enhanced safety measures before widespread adoption can be achieved. The domain of autonomous driving research continues to grapple with safety during curve sections, which are notorious for being accident-prone [2].
Beyond safety considerations, the improved ability to detect and navigate curved lanes contributes to enhanced traffic flow, potentially mitigating congestion and reducing commute times. The significance of curved lane detection extends further as autonomous vehicles increasingly rely on detailed road geometry and lane position information to make informed decisions, especially in negotiating turns, curves, and intersections. This technology proves particularly valuable on curved roads, such as those found in complex urban and mountainous terrains, where accurate detection of lane boundaries ensures vehicles stay within designated lanes, minimizing the risk of accidents resulting from lane departures [1]. Traditional lane detection methods predominantly rely on image processing techniques, often leveraging Hough transform for lane feature extraction, which yields satisfactory results for long, solid lanes. However, the emergence of deep learning technologies presents a promising avenue for addressing curve lane detection challenges. In particular, the YOLOv5 algorithm has shown promise in detecting curves and shorter lanes efficiently [8]. Considering that a moving car, depending on its speed, requires a certain amount of time to stop or reduce speed while maintaining stability, it becomes necessary to detect road lanes not only in the near field but also in the far-field of view.
II. LITERATURE SURVEY
As autonomous driving technologies become more prevalent, standards organizations are emphasizing the importance of robust perception systems, including curved lane detection, to ensure the safety and reliability of vehicles on public roads.
Many studies have been conducted to assess its potential applications and effectiveness. Some examples of relevant literature are given below:
- Wang et al. introduced an algorithm for detecting curves using a linear model [7]. Their research demonstrated that this approach is effective for detecting most curved road conditions. However, the algorithm is primarily designed for small curvature curves found on highways or urban roads.
- Tamal Datta et al. presented a lane detection technique that involves several image pre-processing steps, including grayscale conversion, Canny edge detection, and bitwise logical operations applied to the input image. Additionally, the technique includes masking the image based on the region of interest (ROI) within the image [3]. The final step employs the Hough transformation method to detect lines, yielding parameters for straight lines.
- Shun Yang et al. introduced an alternative approach to enhance lane detection accuracy by replacing traditional image pre-processing methods [5]. Their technique leverages deep learning-based lane detection, shifting away from feature-based detection. However, the implementation of their method, which utilizes a UNet-based encoder-decoder, necessitates a high-performance GPU such as the Nvidia GeForce GTX 1060 for both training and testing phase.
III. PROPOSED METHODOLOGY
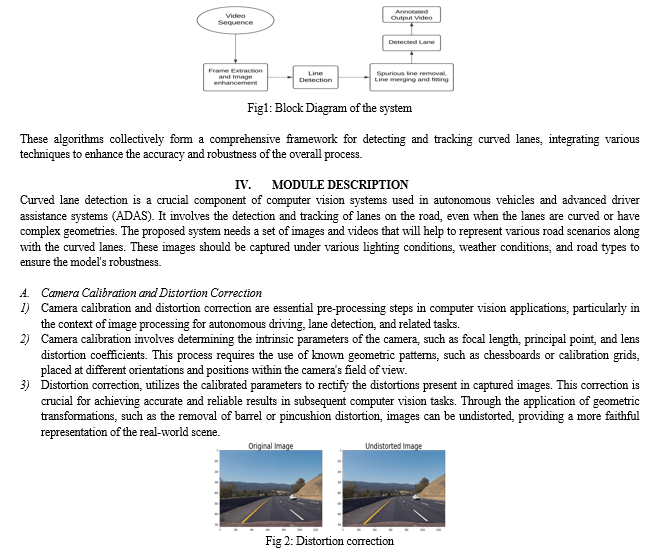
The detection of curved lanes in images or video frames is a multifaceted process that typically involves the integration of computer vision and image processing techniques. This complex task requires a cohesive approach to identify and track the curved road markings that guide vehicles along winding roads. In order to extract meaningful information from visual data, a series of image preprocessing steps are employed. The proposed approach for designing a framework to illustrate the functionality can be summarized as follows:
- Image pre-processing: It contains Grayscale Conversion, Image Thresholding, Noise Reduction, Perspective Transformation, Sobel Edge Detection.
- Curve Lane Detection: It mainly includes sliding window search and curve fitting for detection of lane.
The evaluation focused on the effectiveness of preprocessing techniques in improving lane markings' visibility and reducing noise. Results showed enhanced lane detection accuracy post-preprocessing, with clearer markings and reduced interference.
VI. FUTURE SCOPE
- The future scope of the lane detection includes complex environment taking into account the different environments such as the Weather conditions: fog, mist, cloudy, sunny, bright day light, darker, shadow or when there occurs obstacles and humps, speed Breakers in the road.
- Future vehicles may communicate with each other (V2V communication) to share lane information, providing a collective awareness of the road, which can improve overall safety and traffic management.
- Curved lane detection can contribute to the creation of high-definition maps with detailed information about curved roads. These maps are essential for autonomous vehicles and can improve navigation accuracy.
- Curved lane detection can also be extended to detect pedestrian lanes and crosswalks in curved or complex road scenarios. This would improve pedestrian safety, especially in urban environments.
Conclusion
The framework for curved lane detection comprises image preprocessing steps and curve lane detection algorithms. Image preprocessing involves Grayscale Conversion, Image Thresholding, Noise Reduction, Perspective Transformation, and Sobel Edge Detection, enhancing data quality for analysis. Curve lane detection using sliding window search and curve fitting algorithms demonstrated robustness in identifying curved road markings accurately. Performance across varied scenarios, including different curvatures and lighting, showcased reliability and adaptability. Quantitative metrics like detection rate, false positives, and false negatives assessed accuracy. High detection rates with minimal false results indicated the system\'s efficacy in detecting and tracking curved lanes accurately. The framework seamlessly integrates image preprocessing and curve lane detection, resulting in a reliable system for detecting and tracking curved lanes in images or video frames.
References
[1] Fleetwood, J. Public health, ethics, and autonomous vehicles. Am. J. Public Health 2017, 107, 532–537 [2] Chen, C.; Tang, L.; Wang, Y.; Qian, Q. Study of the Lane Recognition in Haze Based on Kalman Filter. In Proceedings of the 2019 International Conference on Artificial Intelligence and Advanced Manufacturing (AIAM), Dublin, Ireland, 16–18 October 2019; pp. 479–483. [3] Datta, T.; Mishra, S.K.; Swain, S.K. Real-Time Tracking and Lane Line Detection Technique for an Autonomous Ground Vehicle System. In Proceedings of the International Conference on Intelligent Computing and Smart Communication 2019; Springer: Singapore, 2020; pp. 1609–1625. [4] Deng.J, and Han .Y. A real-time system of lane detection and tracking based on optimized RANSAC B-spline fitting. Research in Adaptive and Convergent System, 2013, pp. 157-164. [5] Yang, S.; Wu, J.; Shan, Y.; Yu, Y.; Zhang, S. A Novel Vision-Based Framework for Real-Time Lane Detection and Tracking; S.A.E. Technical Paper; S.A.E.: Warrendale, PA, USA, 2019; Volume 2019. [6] Jiang, L.; Li, J.; Ai, W. Lane Line Detection Optimization Algorithm based on Improved Hough Transform and R-least Squares with Dual Removal. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; Volume 1, pp. 186–190. [7] Wang, H.; Wang, Y.; Zhao, X. Lane Detection of Curving Road for Structural Highway with Straight-Curve Model on Vision. IEEE Trans. Veh. Technol. 2019, 68, 5321–5330. [8] Cheung yuk-wing, Wong keung-keung. Research on wheat imperfect grain recognition based on Python-OpenCV image processing technology[J]. Journal of the Henan University of Technology, 2021, 42(06):105-112.
Copyright
Copyright © 2024 Shipra Singh, Shivani Mishra, Dr. Sadhana Rana. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61268
Publish Date : 2024-04-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online