

Ijraset Journal For Research in Applied Science and Engineering Technology
Traffic Sign Detection and Recognition System using CNN
Authors: Korada Bala Pavani, Devarakonda Aswitha, Nandam Susmitha
DOI Link: https://doi.org/10.22214/ijraset.2024.63889
Certificate: View Certificate
Abstract
Traffic signs play a crucial role in providing drivers with critical information. Therefore, motorists must possess the ability to read and understand traffic signals in order to drive safely. There has been a lot of research on traffic sign detection during the past many decades. There is a severe lack of real-time and precise detections in the present state of the art of traffic sign detection, which is preventing it from being really useful. This study details an approach to traffic sign recognition that operates in real-time and provides drivers with voice assistance. This system is comprised of two subsystems. Locating and recognising traffic lights is the first step in using a trained Convolutional Neural Network (CNN). A text-to-speech engine will then narrate the traffic sign to the driver after it has been detected. Using Deep Learning techniques, we construct a very efficient CNN model using a benchmark dataset for real-time detection and identification. One benefit of this technology is its ability to recognise and elucidate traffic signs for drivers, regardless of their level of attentiveness or comprehension. This sort of technology is equally important for developing autonomous automobiles.
Introduction
I. INTRODUCTION
Due to the widespread usage of vehicles, every country has implemented suitable road laws and regulations to ensure the safety of drivers and passengers. One of them is the traffic sign, which provides drivers with crucial information and helps to convey the rules that need to be followed in that area. A traffic sign is designed to convey a message quickly and accurately, even to those with less cognitive capacity. Various factors contribute to drivers failing to see traffic signs, which may result in accidents. These include drivers' lack of attention, lack of awareness, carelessness, and distracting driving habits. Furthermore, drivers in less-populated areas may struggle to understand the meaning of a given street sign since they are unfamiliar with the abundance of signs seen in more metropolitan areas. Drivers sometimes disregard certain traffic signs because they think they are superfluous. The drivers' varied perspectives also contribute to this lack of knowledge. Fatalities and severe injuries might result from drivers failing to interpret traffic signals. In order to solve these problems, this study suggests a way to better detect and identify traffic signs in real time and to narrate these signals to drivers. Both autonomous and assistive vehicle systems may benefit from this kind of configuration. In order to put the framework into action, Just go for it employs Convolutional Brain Organisation (CNN) model engineering. The model's simplified accuracy and faster locating rates make the framework suitable for continuous traffic sign detection. Drivers might benefit by listening to the message of a certain traffic sign while they are on the road. The audio narration helps with the problems of not seeing the traffic signs, not knowing what they are, and how complicated they are.
II. LITERTURE SURVEY
Survey 1 – Proposed By: S.A. Bhaskar et al. (2020)
Methodology: Deep Learning Techniques, Convolutional Neural Network (CNN).
Description: Their research focused on improving the designs and training methods of convolutional neural networks for use in real-time detection and classification applications.
Final Product: We got an accuracy rate of 0.875 using CNN and deep learning. Decline factors: Their capacity to generalise across varied kinds of traffic signs and environmental situations is limited since they depend on characteristics that are manually created.
Survey 2 – Proposed By: G. Zhang et al. (2018)
Methodology: Traditional deep learning techniques.
Description: This research shed light on the current state of the art by comparing several algorithms and pointing out their advantages and disadvantages. Final Product: The accuracy rate in 2018 was 0.823 using traditional techniques.
Decline factors: The real-time performance that is essential for applications such as autonomous driving is impacted by processing speed restrictions.
Survey 3– Proposed By: P.S. Amudhavel et al. (2019).
Methodology: Traditional computer vision techniques with CNN.
Description: They set out to find a way to combine the best features of the two methods in order to make detection more accurate and resilient in many kinds of environments.
The result was an increase in the accuracy rate (0.845) over the previous year.
Cons: Big datasets pose scalability issues.
Survey 4 – Proposed By: R.K. Singh et al. (2019).
Methodology: Hardware and Software based solutions
Description: Their research summarised enabling technology developments and offered a framework for further study in the topic.
Final Product: The attained accuracy rate is 0.862, which is based on hardware and software solutions.
Downsides: The setting makes a difference.
Survey 5 – Proposed By: Y. Wang et al. (2020)
Methodology: Deep Learning, Geometric features.
Description: Their solution outperformed the state-of-the-art because it used geometric restrictions to enhance the localisation accuracy of identified indicators.
Final Product: A new level of accuracy of 0.902 has been achieved. Negative: Insufficiency in Stability
III. PROPOSED SYSTEM
We are currently developing a method to improve our real-time traffic sign detection, interpretation, and explanation capabilities. Both fully autonomous vehicles and technologies that help vehicles may benefit from this kind of technology. The system is built using the convolutional Neural Network (CNN) architecture, which is known for its rapid detection rates.
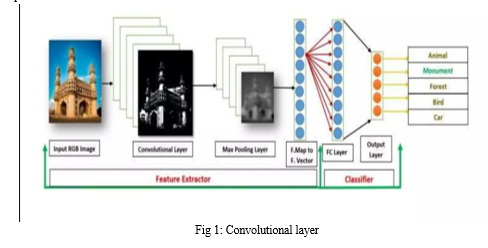
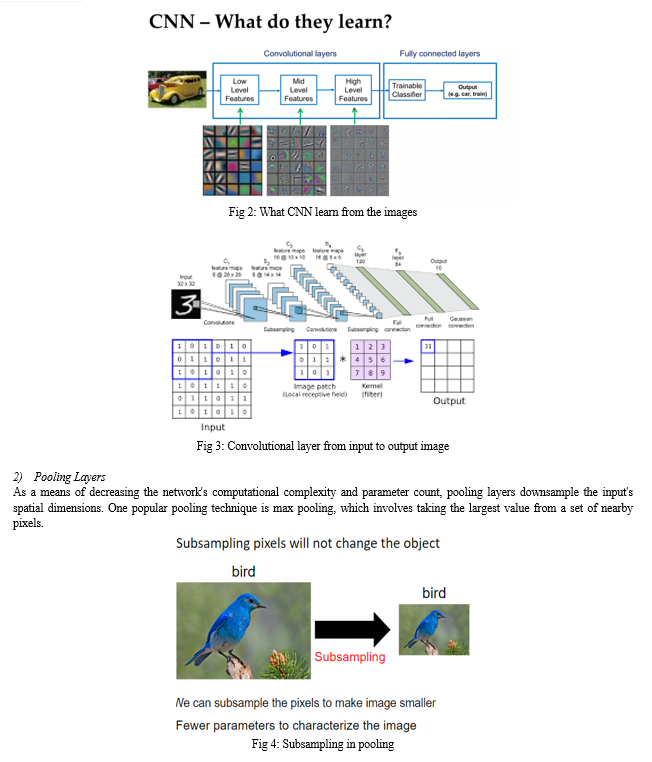
Image processing and recognition are two areas where deep learning algorithms like Convolutional Neural Networks (CNNs) shine. It has several layers, such as fully connected, pooling, and convolutional layers. A building's design Inspired by how the human brain processes visual information, convolutional neural networks (CNNs) excel in extracting hierarchical patterns and spatial correlations from pictures.
Key components of a Convolutional Neural Network include:
1) Convolutional Layers
These layers process input pictures using convolutional processes, identifying characteristics like textures, edges, and more complicated patterns with the use of filters (also called kernels). In order to maintain the spatial connections between pixels, convolutional procedures are used.
Conclusion
Here, we detail a 55 FPS real-time traffic sign recognition method that has shown to be quite reliable. With an average accuracy of 64.71 percent, we were likewise successful. While keeping the detection speed constant, adjusting the hyper-parameters and modifying the YOLO architectural configurations may significantly increase the accuracy of the existing technique. Methods include feeding the CNN partly readable signs, employing 3D reconstruction methods, and fuzzy C-means clustering may further mitigate the effects of partially obscured or broken traffic signs, as well as severe weather. With an average mean accuracy of 64.71 percent, the model presented in this study can identify traffic signs at a very high frame rate of 55 frames per second. The system\'s real-time performance is guaranteed by a frame rate greater than 30 FPS. In addition, the voice assistant function and precise detection can take care of most issues caused by drivers who aren\'t paying attention to or who overlook traffic signals.
References
[1] J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You Only Look Once: Unified, Real-Time Object Detection,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, Jun. 2016, pp. 779–788, doi: 10.1109/CVPR.2016.91. [2] W. Ritter, F. Stein, and R. Janssen, “Traffic sign recognition using colour information,” Math.Comput.Model., vol. 22, no. 4–7, pp. 149–161, Aug. 1995, doi: 10.1016/0895-7177(95)00131-K. [3] S. B. Wali, M. A. Hannan, A. Hussain, and S. A. Samad, “An Automatic Traffic Sign Detection and Recognition System Based on Colour Segmentation, Shape Matching, and SVM,” Math.Probl. Eng., vol. 2015, pp. 1–11, 2015, doi: 10.1155/2015/250461. [4] H. Fleyeh, “Color detection and segmentation for road and traffic signs,” in IEEE Conference on Cybernetics and Intelligent Systems, 2004., Singapore, 2004, vol. 2, pp. 809–814, doi: 10.1109/ICCIS.2004.1460692. [5] S. S. MdSallah, F. A. Hussin, and M. Z. Yusoff, “Shape-based road sign detection and recognition for embedded application using MATLAB,” in 2010 International Conference on Intelligent and Advanced Systems, Kuala Lumpur, Malaysia, Jun. 2010, pp. 1–5, doi: 10.1109/ICIAS.2010.5716193. [6] A. Shustanov and P. Yakimov, “A Method for Traffic Sign Recognition with CNN using GPU:,” in Proceedings of the 14th International Joint Conference on e-Business and Telecommunications, Madrid, Spain, 2017, pp. 42–47, doi: 10.5220/0006436100420047. [7] R. Girshick, J. Donahue, T. Darrell, and J. Malik, “Region-Based Convolutional Networks for Accurate Object Detection and Segmentation,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 38, no. 1, pp. 142–158, Jan. 2016, doi: 10.1109/TPAMI.2015.2437384. [8] B. Gao, Z. Jiang, and J. zhang, “Traffic Sign Detection based on SSD,” in Proceedings of the 2019 4th International Conference on Automation, Control and Robotics Engineering - CACRE2019, Shenzhen, China, 2019, pp. 1–6, doi: 10.1145/3351917.3351988. [9] P. Soviany and R. T. Ionescu, “Optimizing the Trade-off between Single-Stage and Two-Stage Object Detectors using Image Difficulty Prediction,” ArXiv180308707 Cs, Aug. 2018 [10] K. He, X. Zhang, S. Ren, and J. Sun, “Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition,” ArXiv14064729 Cs, vol. 8691, pp. 346–361, 2014, doi: 10.1007/978-3-319-10578-9_23.
Copyright
Copyright © 2024 Korada Bala Pavani, Devarakonda Aswitha, Nandam Susmitha . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET63889
Publish Date : 2024-08-06
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online