

Ijraset Journal For Research in Applied Science and Engineering Technology
Transportation using Drone
Authors: Dr. Madhukar BN, Abhishek A, Dinesh A, Ganesh P, Nikhil S Nayak
DOI Link: https://doi.org/10.22214/ijraset.2025.66471
Certificate: View Certificate
Abstract
This paper presents the design and proposed system will focus on designing drones capable of carrying lightweight to moderate payloads, equipped with advanced navigation systems and sensors to ensure safe and accurate delivery. It will integrate real-time obstacle detection, and automated landing systems for precision delivery. The drones will be managed through a centralized control system that coordinates flight paths, monitors battery status, and ensures compliance with air traffic regulations
Introduction
I. INTRODUCTION
Drone quadcopters are revolutionizing transportation by offering efficient, cost-effective, and environmentally friendly solutions across various industries. These unmanned aerial vehicles (UAVs), equipped with four rotors for stability and agility, are transforming logistics, medical services, agriculture, and urban mobility. They enable rapid parcel delivery, access remote or congested areas, and provide essential medical supplies in emergencies. In agriculture, drones distribute seeds and fertilizers, while urban initiatives explore drone taxis for short-distance travel. With advantages like speed, scalability, and reduced carbon emissions, drone transportation faces challenges such as regulatory compliance, payload limits, and weather dependency. However, advancements in battery technology, AI navigation, and 5G connectivity promise a future where drones play a pivotal role in streamlining transportation and accessibility.
The system is designed to track critical health parameters, including body temperature, heart rate, blood oxygen saturation (SpO2), ECG signals, and sudden falls using an accelerometer. The ESP32 microcontroller acts as the central processing unit, collecting data from the sensors and sending it to the cloud platform ThingSpeak for realtime visualization and analysis. An LCD display connected to the system allows local data monitoring, providing instant feedback to the patient or caregiver. In case of an emergency, such as abnormal readings or fall detection, the system automatically triggers an alert via a Telegram bot, ensuring immediate notification to the concerned individuals.
The transportation sector is undergoing a significant transformation with the advent of drone technology. Drones, also known as Unmanned Aerial Vehicles (UAVs), are increasingly being explored for their potential to enhance the efficiency, speed, and cost-effectiveness of transportation systems. This review synthesizes existing literature to provide an overview of how drones are being utilized in transportation, including key applications, benefits, challenges, and future trends.
II. PROPOSED METHOD
In a drone, two of the motors rotate in a clockwise direction and the other two motors in an anticlockwise direction. The speed of the motors is controlled by the electronic speed controller. If the two motors on the rear side of the drone rotate at high speeds, then the drone moves in a forward direction. If the two motors on the front side of the drone rotate at high speeds, then the drone moves in a backward direction. If the two motors on the left side of the drone rotate at high speeds, then the drone moves in a rightward direction. If the two motors on the right side of the drone rotate at high speeds, then the drone moves in a leftward direction. The transmitter sends the desired signal to the receiver and the flight controller sends the corresponding signals to the ESC.
Figure.1 shows the Block diagram of the drone. In the block diagram electronic speed controllers, and Radio receivers are connected to the Ardupilot Mega flight controller. Flight controllers, electronic speed controllers, and Brushless DC motors are powered with LiPo Battery using a power distribution board. The radio transmitter sends the signal to the receiver that is connected to the flight controller and the receiver receives throttle, yaw pitch, and roll signals from the transmitter and sends the corresponding signals to the flight controller. The flight controller sends the electronic signals to the speed controllers accordingly. ESC manages the speed of the motors based on the signals received from the Ardupilot Mega flight controller.
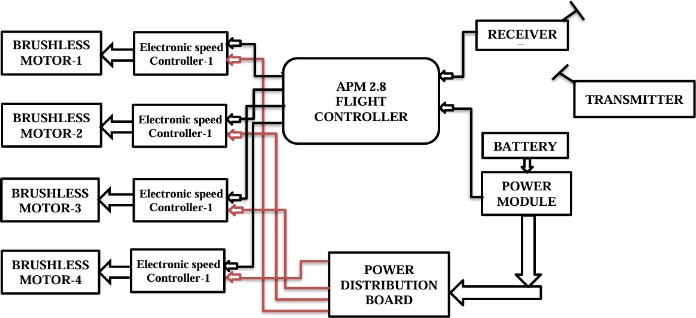
Figure 1. Block Diagram
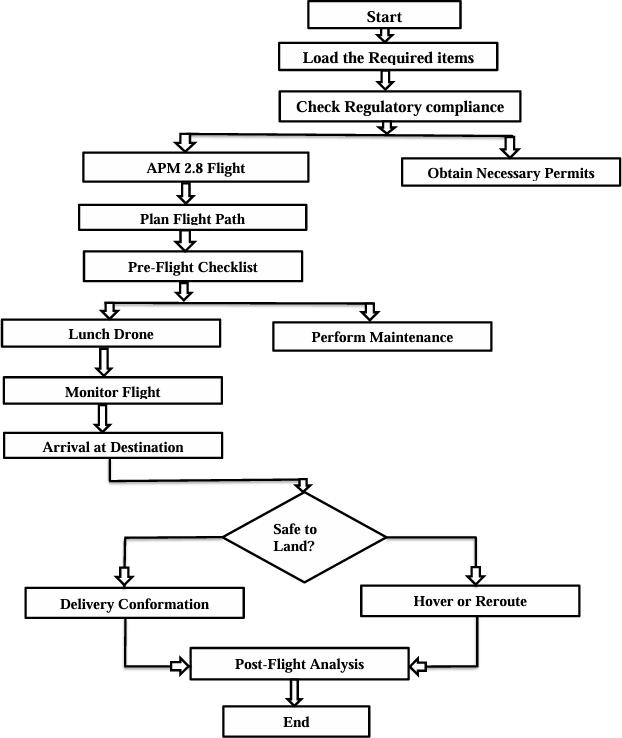
Figure 2. Flow chart

Figure 3. Top View of Quadcopter
III. CONSTRUCTION PROCESS
The construction of transportation using drones represents a groundbreaking project that leverages advanced aerial technology to enhance logistics and mobility. Drones, or unmanned aerial vehicles (UAVs), offer the capability to bypass traditional road networks, allowing for efficient and flexible transportation in congested urban areas or remote regions with limited infrastructure. This project involves designing specialized drones capable of carrying various cargo types and delivering essential goods like medical supplies, food, and other necessities. These drones are equipped with GPS navigation, collision-avoidance systems, and automated flight management software, enabling them to perform safe, autonomous deliveries. By focusing on reliable and scalable drone transportation, this project aims to reduce delivery times, lower transportation costs, contributing to a sustainable and efficient future in logistics.
IV. IMPLEMENTATION
The construction of transportation using drones represents a groundbreaking project that leverages advanced aerial technology to enhance logistics and mobility. Drones, or unmanned aerial vehicles (UAVs), offer the capability to bypass traditional road networks, allowing for efficient and flexible transportation in congested urban areas or remote regions with limited infrastructure. This project involves designing specialized drones capable of carrying various cargo types and delivering essential goods like medical supplies, food, and other necessities. These drones are equipped with GPS navigation, collision-avoidance systems, and automated flight management software, enabling them to perform safe, autonomous deliveries. Additionally, the project addresses regulatory, safety, and environmental considerations to ensure responsible use of drone technology in public spaces. By focusing on reliable and scalable drone transportation, this project aims to reduce delivery times, lower transportation costs, contributing to a sustainable and efficient future in logistics.
Conclusion
The integration of drones, particularly quadcopters, into the transportation sector represents a significant advancement in logistics and urban mobility. Their ability to deliver packages swiftly, access remote areas, and alleviate traffic congestion offers a promising alternative to traditional transportation methods. The environmental benefits, including reduced carbon emissions and lower reliance on fossil fuels, further enhance their appeal in an era increasingly focused on sustainability. While challenges such as regulatory hurdles, public acceptance, and technological limitations remain, ongoing innovations and investments in drone technology are paving the way for broader adoption. As we move forward, the potential applications of drones in transportation will likely expand, transforming how we think about logistics, emergency response, and urban commuting. Ultimately, the successful implementation of quadcopters in transportation could lead to a more efficient, accessible, and environmentally friendly future.
References
[1] Y. Funabashi, I. Taniguchi, and H. Tomiyama, “Work-in-progress: Routing of delivery drones with load-dependent flight speed,” in Proc. IEEE Real-Time Syst. Symp. (RTSS), Dec. 2019, pp. 520–523, doi: 10.1109/RTSS46320.2019.00054. [2] S. Manna and A. Narasimha murthy, “A route planning strategy for commercial deliveries using drones,” in Innovative Design, Analysis and Development Practices in Aerospace and Automotive Engineering. Singapore: Springer, Jan. 2021, doi: 10.1007/978-981-15-6619-6_34. [3] M. Pachayappan and V. Sudhakar, “A solution to drone routing problems using docking stations for pickup and delivery services,” Transp. Res. Rec., J. Transp. Res. Board, vol. 2675, no. 12, pp. 1056–1074,Sep. 2021, doi: 10.1177/03611981211032219 [4] E. L. Marques, V. N. Coelho, I. M. Coelho, B. N. Coelho, and L. S. Ochi, “A multi-objective metaheuristic for a green UAV grid routing problem,” in Proc. Int. Conf. Variable Neighborhood Search, Apr. 2020, pp. 152–166, doi: 10.1007/978-3-030-44932-2_11. [5] T. Cokyasar, “Delivery drone route planning over a battery swapping network,” Proc. Comput.Sci., vol. 184, pp. 10–16, Jan. 2021, doi:10.1016/j.procs.2021.03.013. [6] J. Gómez-Lagos, B. Rojas-Espinoza, and A. Candia-Véjar, “On a pickup to delivery drone routing problem: Models and algorithms,” Comput. Ind. Eng., vol. 172, Oct. 2022, Art. no. 108632, doi: 10.1016/j.cie.2022.108632. [7] A. Khanda, F. Corò, F. B. Sorbelli, C. M. Pinotti, and S. K. Das, “Efficient route selection for drone- based delivery under time-varying dynamics,” in Proc. IEEE 18th Int. Conf. Mobile Ad Hoc Smart Syst. (MASS), Oct. 2021, pp. 437–445, doi:10.1109/MASS52906.2021.00061. [8] Z. Tian, Z. J. Haas, and S. Shinde, “Routing in solar- powered UAV delivery system,” Drones, vol. 6, no. 10,p. 282, Sep. 2022, doi: 10.3390/drones6100282.
Copyright
Copyright © 2025 Dr. Madhukar BN, Abhishek A, Dinesh A, Ganesh P, Nikhil S Nayak. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Download Paper
Paper Id : IJRASET66471
Publish Date : 2025-01-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online