

Ijraset Journal For Research in Applied Science and Engineering Technology
Underwater Exploration and Cleaning Drone
Authors: Supriya S. Telsang, Ishan P. Ranadive, Chinmay D. Rane, Taneesha V. Malve, Manas M. Bagul, Bhawana D. Rakshit, Shantanu P. Rajurkar, Shwet B. Ramteke
DOI Link: https://doi.org/10.22214/ijraset.2024.63013
Certificate: View Certificate
Abstract
The project aims to produce a novel drone that can move underwater with remote control and communicate with the server on its own drones make it possible to explore far-off locations that are not accessible by foot. However, it is difficult to determine various parameters of water due to insufficient tools and access. Combining a camera and sensors gives a spatial understanding of water. However such kinds of designs are complex due to the presence of different sensors and the capability of drones to function all of them while carrying them in water. We introduce a novel drone technology system for cleaning, exploration, and water quality monitoring in this research.The drone can sample and analyze water, showing real-time images, pH value, and TDS value, and checking if the water is turbid. The drone is controlled by wireless Bluetooth technology which helps to establish contact with the drone underwater. Arduino UNO is used to make sensors, and the values obtained from the gathered data are displayed on the mobile screen.
Introduction
I. INTRODUCTION
Drones used for underwater exploration and cleaning, also known as autonomous underwater vehicles (AUVs) or remotely controlled vehicles (ROVs), play a crucial role in various fields and have significant importance for both scientific research and practical applications, offering several advantages and addressing specific challenges associated with underwater cleaning and maintenance.
Drones are also known as unmanned underwater vehicles (UV). Essentially, an underwater drone is used for underwater surveillance. This drone may be remotely controlled using Bluetooth technology [23].
Drones are still utilized for a number of commercial purposes, including environmental monitoring, aquaculture management, maritime security, oceanography research, offshore oil and gas installation, filmmaking, tourism, marine archaeology, port management, etc.Drones with cameras attached are used to make movies for commercials.
This research paper is centered on the creation of a comprehensive water management and quality measurement system with Bluetooth control, utilizing Arduino technology and integrating a camera module for real-time image processing. The drone also demonstrates various parameters of water such as pH, turbidity, and TDS. When the drone comes in contact with water it determines real-time measurements of the given parameters. The Arduino UNO analyzes the real-time analog reading and converts it into digital reading]. This system offers users the ability to control, collect, and further process the data and display it on mobile applications.
Since there are a lot of constraints for humans to physically explore the underwater world, it is operated according to our convenience and the system functions efficiently at any time of the day. Our drone makes the process more simplified. It provides convenience, flexibility, energy efficiency, and exploration efficiency by allowing users to control the drone through different access points.
A. Specific Research Objectives
The proposed work aims to provide an AUV-based rapid underwater exploration system for underwater monitoring. Here are a few of the particular goals:
- Incorporating a device for floating water so that the AUV can easily float on water with high stability.
- To collect data on water quality from water sources with stable water currents.
- To provide quality live video surveillance.
- To determine whether water is potable.
- To be used for search and rescue operations and underwater disaster management.
II. LITERATURE REVIEW
Due to rapid technologization, drones have been used for various purposes and their contribution to research has been revolutionary. Yali Wei, et al. [1] used a model predictive control ( MPC ) algorithm to provide a dynamic target tracking method. It also predicts the target's position with the help of artificial intelligence, automation control, and pattern recognition.
Real-time identification and location of the dynamic target were achieved by processing AUV sonar pictures. The dynamic target's position was then properly predicted at the following instant by applying the Kalman filter.
Wolfgang Slany [2] offers a visual programming framework for Android tablets and smartphones that is portable.It enables Bluetooth, Bluetooth Arduino boards, and other Bluetooth-enabled wireless control of external gear.
Wan Muhd Arif Bin Wan Sabr, et al.[3] The creation of an affordable remotely controlled underwater vehicle (ROV) that can observe underwater surroundings without endangering human life is the topic of this study. The overall safety function is designed to prevent unexpectedly large currents from overloading internal circuits and to prevent over-discharging batteries from extending their lifespan. For safety reasons, the robot is equipped with an inbuilt sensor that measures both its movement speed and the voltage level of the battery.For the purposes of underwater monitoring, observation, and exploration, it contains a camera that transmits users at the base station with underwater views.The drone is made low-cost and efficient.
Pankaj Agarwal, et al. [4]This study offers a cost-effective multipurpose drone that has several functions such as water sampling, onboard sensors for monitoring the quality of the water and air, and live video surveillance via GPS, and video recording capability. A water floating mechanism that can land and float on a water's surface with a great level of accuracy and steadiness is integrated into the suggested system. From the water sources' surface, like ponds, trenches, etc., with a steady water stream, it can gather water samples at a rate of 50 to 100 ml every trip. The system has an on-board GPS-enabled video recording mechanism as well as an image and video surveillance mechanism. Our UAV is outfitted with a top-notch Go-Pro 6 HD action camera.
PENG YuHai ,et al [5] describe the application settings, technological features, and hierarchical design of Bluetooth technology. Building on this foundation, the author suggested creating a wireless manufacturing network in an industrial setting and switching from wired to Bluetooth wireless communication technology. The goal is to enable wireless communication between CNC systems and location computers. Lastly, it provides the Bluetooth construction reference model for a wireless manufacturing network.
M. A. Kasno, et al [6] The creation of a small-scale, autonomous underwater drone is presented in this work. It is intended to be used for underwater operations as well as a few aerial jobs that need a brief hover over water.This underwater drone's propulsion system is founded on a thruster, consisting of a propeller and motor. The underwater drone's vertical trajectory was the main focus of testing and experimentation. To observe the underwater drone's performance, this paper also investigates propeller design using thrust measurement.
Cheng-Ta Chiang, et al. [7] This research proposes a calibrated CMOS transducer circuit to gauge the turbidity of the water. A pulse stream is the output signal. Broadcasting it over a variety of digital transmission media is simple. Furthermore, the suggested calibration technique can lessen nonlinear errors brought on by turbidity sensors.
J. Matos and O. Postolache, et al [8] The article discusses a multichannel sensor module and a Raspberry Pi platform-based monitoring system that are connected to parameters for measuring air and water quality. Thus, underwater acoustic waves are used to detect the concentration of gases, temperature, relative humidity, and conductivity.The information is synced with a remote server database and saved on the drone's computational platform's memory. On the server side, sophisticated data processing techniques were put into place. In addition, a mobile application for statistical analysis and data visualization was created for field workers.
T. Lu, Y. Dou and Y. Wang, et al.[9] The Autonomous Underwater Vehicle used to study the arctic marine ice and the water areas beneath it is the basis for this essay. Various sensors and equipment are installed and carried by the autonomous underwater vehicle, which serves as a platform for under-ice operations for long-duration, regional real-time underwater observation operations.The Arctic Ocean's temperature, salinity, depth, chlorophyll concentration, and other environmental factors can be monitored by the SEM, and CTD.Along with that other sensors are used in this autonomous underwater vehicle.Simultaneously, it can observe the formation of ice. Beneath the sea ice in the polar regions, it obtains the depth of the water in real-time using installed pressure sensors, imaging sonar, and deep-water cameras plus additional apparatus. Following the measurement, it may be operated remotely or come back autonomously at the starting position.
Acharya, Bharat & Bhandari, et al [10] This comprehensive analysis delves into various UAV technologies and their application for efficient, characterization, tracking, evaluation, and modeling of water and soil resources on-demand at a reasonable cost.In studies involving surface water, groundwater, land-atmosphere contact studies, water management in potable types such as forestry and farming, modeling in ecosystem hydrology, and observation, they examine both important potential and obstacles.
JoãoVítor Silva Costa, et al.[11] Although it can be logistically difficult, measuring the size and volume of man-made reservoirs is essential for keeping an eye on this aquatic setting.Frequent, reliable measurement may not be practicable when it comes to isolated rural reservoirs due to complicated limited accessibility and field logistics. Drones and other remote sensing technology have given rise to new ways of solving these issues while lowering the amount of fieldwork needed. By comparing drone data with field measurements, the current study aims to evaluate a novel approach for estimating the extent and the amount of man-made reservoirs in rural regions. With a correlation of over 94% between the volume and area determined by drone, the two approaches displayed an average variance of 8.5%.
C. Joochim, R. Phadungthin, and S. Srikitsuwan, et al.[12] The concept and development of a miniature unmanned submarine is presented in this study. It is intended for underwater exploration. Since it can be dangerous to use people to investigate in hard-to-reach places, underwater vehicles are meant to take the place of people. Underwater exploration capabilities of humans are restricted. Thus, to assist humans in carrying out these research tasks, a specialized instrument or technology is needed, such as a remotely operated underwater vehicle (ROV).Processing programs for graphical user interfaces (GUIs) and microcontrollers (Arduinos) are the tools used in the development process to read and manipulate sensor data, including accelerometer, gyrometer, and motor speed control, to maintain the movement of the vehicle stabilizer.
III. METHODOLOGY/EXPERIMENTAL
A. Materials/Components
- Battery
- 2X DC motors
- Turbidity sensor
- pH sensor
- TDS meter
- HC 05 Bluetooth module
- Trans receiving device
- Wifi module
- Micro IP ROV camera
- Arduino UNO
- Bottle
- Propellers
- Jumping wires
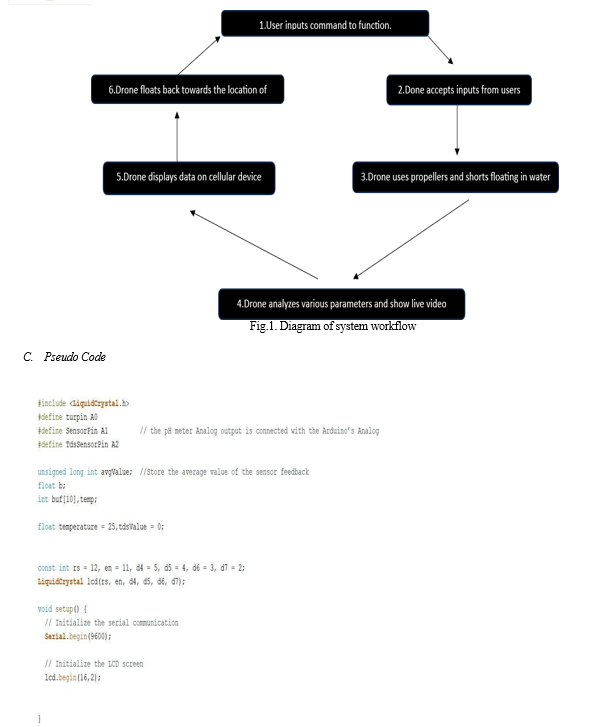
B. Algorithm//Method
- A cellular device will control the drone when it traverses through water.
- The working propellers will be the driving force for the mobility of the system.
- The sensors attached to the mainframe would record the reading of various sensors and send it to the analog pin of Arduino UNO. This reading is analogue reading.
- The recorded reading will be converted to digital reading by Arduino UNO and displayed on the output device.
- The fundamental principle used in our project is buoyancy.
- The buoyant force that a submerged item in a liquid experiences is equivalent to the fluid's weight that the object has displaced., according to Archimedes' Principle. Mathematically, the buoyant force (F_b) is written as follows: ⋅g⋅V = ρ⋅g⋅V, where g is the acceleration caused by gravity,ρ is the density of liquid and V is the volume of fluid that is displaced. If a fluid's density is greater than the object's, it will float in the liquid. On the other hand, the object will sink if its density is higher than that of the fluid. An object experiences an apparent loss of weight proportionate to the force that buoyancy applies to it while it's submerged in a liquid. The amount of fluid that an object displaces determines the buoyant force. The buoyant force increases with the fluid's displacement volume.A thorough understanding of buoyancy is essential for several real-world situations, including the design of floating structures, hot air balloon flights, submarine operations, and ship construction. When creating objects that interact with fluids, engineers and architects consider buoyancy.
Conclusion
In conclusion, our underwater exploration drone offers a range of significant advantages. The system is equipped with a lightweight mechanism at its base which helps it to float underwater surfaces with good stability. In the first stage, we will use it for underwater videography. Later, it can also be used to monitor dams and bridges and to capture underwater videos for more information about marine life. Not only that, but it can also be helpful for the marine defense system and rescuing endangered water species. We are also in the process of equipping lidar (light detection and ranging) technology within our drone so that it can be used in many other applications.
References
[1] Yali Wei, Daqi Zhu, Zhenzhong Chu” Underwater Dynamic Target Tracking of Autonomous Underwater Vehicle Based on MPC Algorithm” IEEE. [2] Wolfgang Slany”,2012 IEEE Symposium on Visual Languages and Human-Centric Computing: Poster and Demos”. [3] Wan Muhd Arif Bin Wan Sabri, Irfan Rahim Zabidi, Mohd Aliff Mohd Abd Musthalib, Zimam Amer Muhamad, Muhammad Irfan Mohd Hazman, Muhammad Syafiq Mohd Yusof, Lwinthein Naing, Zulkifli Zainal Abidin, “Low-cost Remotely Operated Underwater Vehicle for Underwater Observation Purposes”, 2017 IEEE. [4] Pankaj Agarwal, Mukesh Kr. Singh, “A multipurpose drone for water sampling & video surveillance”, 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP).IEEE [5] PENG YuHai “ The Research of Wireless Manufacturing Network Based on Bluetooth Technology”, International Symposium on Information Science and Engineering 2008. [6] M. A. Kasno., \"Small scale underwater drone based on a twin-rotor system,\" 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications (USYS), Kuala Lumpur, Malaysia, 2017, pp. 1-5, doi: 10.1109/USYS.2017.8309439. [7] Cheng-Ta Chiang, Shih-Ming Huang, and Chieh-Neng Wu, “Development of a Calibrated Transducer CMOS Circuit for Water Turbidity Monitoring” 2015 IEEE Sensors Journal. [8] J. Matos and O. Postolache, \"IoT enabled aquatic drone for environmental monitoring,\" 2016 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 2016, pp. 598-603, doi: 10.1109/ICEPE.2016.7781410. [9] T. Lu, Y. Dou, and Y. Wang, \"Research and Application of Unmanned Submersible Vehicle Facing Polar Ice Formation,\" MEMAT 2022; 2nd International Conference on Mechanical Engineering, Intelligent Manufacturing and Automation Technology, Guilin, China, 2022, pp. 1-3. [10] Acharya, Bharat & Bhandari, Mahendra & Bandini, Filippo & Pizarro, Alonso & Perks, Matthew & Joshi, Deepak R. & Wang, Sheng & Dogwiler, Toby & Ray, Ram & Kharel, Gehendra & Sharma, Sadikshya. (2021). Unmanned Aerial Vehicles in Hydrology and Water Management: Applications, Challenges, and Perspectives. Water Resources Research. 57. 10.1029/2021WR029925. [11] JoãoVítor Silva Costa¹, Manuel Eduardo Ferreira¹ and MarciaNunes Macedo² ¹ Federal University of Goiás, Goiânia-BR (joaovsc17@gmail.com; mferreira.geo@gmail.com); ² Woods Hole Research Center, Falmouth-USA (mmacedo@whrc.org)ESTIMATING AREA AND WATER VOLUME OF RURAL RESERVOIRS USING DRONES ©2019 IEEE [12] C. Joochim, R. Phadungthin and S. Srikitsuwan, \"Design and development of a Remotely Operated Underwater Vehicle,\" 2015 16th International Conference on Research and Education in Mechatronics (REM), Bochum, Germany, 2015, pp. 148-153, doi: 10.1109/REM.2015.7380385. [13] Chuan’an Wang, Bo Hu, and Shanzhi Chen, “Joint user association and interference mitigation for drone-assisted heterogeneous wireless networking”, EURASIP Journal on Wireless Communications and Networking 2019. [14] Nahid Mahamud, Galib Muhammad Shahriar, Hedayet Ullah Khan, Sanjida Sharmin, Nusrat Jahan Lisa, “ALW Drone: A New Design And Efficient Approach”,2016 IEEE. [15] Don Daven Christopher Trapal, Bryan Chia Chee Leong, Haw Wen Ng, John Tan Guan Zhong, Sutthiphong Srigrarom, Teng Hooi Chan, “Improvement of Vision-based Drone Detection and Tracking by Removing Cluttered Background, Shadow and Water Reflection with Super Resolution”,2021 IEEE. [16] Dania Eridani1), Olivia Wardhani2), Eko Didik Widianto3) Designing and Implementing the Arduino-based Nutrition Feeding Automation System of a Prototype Scaled Nutrient Film Technique (NFT) Hydroponics using Total Dissolved Solids (TDS) Sensor Proc. of 2017 4th Int. Conf. on Information Tech., Computer, and Electrical Engineering (ICITACEE), Oct 18-19, 2017, Semarang, Indonesia [17] Yaseen Al-Mulla*,1,2, Amna Al-Rueheili1,3 USE OF DRONES AND SATELLITE IMAGES TO ASSESS THE HEALTH OF DATE PALM TREES 1 Remote Sensing and GIS Research Center, Sultan Qaboos University, Al-Khoud 123, PO Box 33, Sultanate of Oman 2Department of Soils, Water and Agricultural Engineering, 3Department of Crop Sciences, Sultan Qaboos University, Al-Khoud 123, PO Box 34, Sultanate of Oman 2020 IEEE [18] Mohd Shahrieel Mohd Aras, Muhamad Khairi Aripin, Muhammad Wahyuddin Nor Azmi, Alias Khamis,3 DOF Small Scale Underwater Manipulator - Gripper for Unmanned Underwater VehicleUnderwater Technology Research Group, Center for Robotics and Industrial Automation (CeRIA) ,2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications [19] Manfredonia, Graduate student member IEEE, C. Stallo member IEEE, M. Ruggieri, IEEE fellow University of Tor Vergata - CTIF Rome, Italy iv.manfredonia@ieee.org, G. Massari, S. Barbante AerialClick Srls Brindisi, Italy info@aerialclick.com,t An early-warning aerospace system for relevant water bodies monitoring ©2015 IEEE [20] Maximilian Hell, Robert C. Bolam, Yuriy Vagapov School of Applied Science, Computing and Engineering, Glyndwr University, Plas Coch, Mold Road, Wrexham, LL11 2AW, UK Aleksey Anuchin Department of Electric Drives, Moscow Power Engineering Institute, 14 Krasnokazarmennaya Street, 111250, Moscow, Russia Design of a Portable Drone for Educational Purposes 2018 25th International Workshop on Electric Drives: Optimization in Control of Electric Drives (IWED), Moscow, Russia, Jan 31 – Feb 02, 2018 [21] Nahid Mahamud, Galib Muhammad Shahriar, Hedayet Ullah Khan, Sanjida Sharmin, Nusrat Jahan Lisa Ahsanullah University of Science and Technology, Bangladesh ALW DRONE: A NEW DESIGN AND EFFICIENT APPROACH 19th International Conference on Computer and Information Technology, December 18-20, 2016, North South University, Dhaka, Bangladesh [22] Julian Kunze? , Vincent Mayer† , Lisa Thiergart? , Saqib Javed† , Patrick Scheppe‡ , Tam Tran? , Markus Haug§ , Mariana Avezum? , Bernd Bruegge? , Eugene C. Ezin ` ¶ Towards SWARM: A Smart Water Monitoring System ©2020 IEEE [23] Hashmi, A.. (2021). A Novel Drone-based Search and Rescue System using Bluetooth Low Energy Technology. Engineering, Technology & Applied Science Research. 11. 7018-7022. 10.48084/etasr.4104. [24] M. Shobana., M. Madhavan., M. V.S, S. Nandhini. and D. Neeraj., \"Ai - Underwater Drone In Protection Of Waterways By Relating Design Thinking Framework,\" 2023 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 2023, pp. 1-4, doi: 10.1109/ICCCI56745.2023.10128399. [25] L. Meng, T. Hirayama and S. Oyanagi, \"Underwater-Drone With Panoramic Camera for Automatic Fish Recognition Based on Deep Learning,\" in IEEE Access, vol. 6, pp. 17880-17886, 2018, doi: 10.1109/ACCESS.2018.2820326.
Copyright
Copyright © 2024 Supriya S. Telsang, Ishan P. Ranadive, Chinmay D. Rane, Taneesha V. Malve, Manas M. Bagul, Bhawana D. Rakshit, Shantanu P. Rajurkar, Shwet B. Ramteke. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET63013
Publish Date : 2024-05-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online