

Ijraset Journal For Research in Applied Science and Engineering Technology
Wall Painting Robot
Authors: Adithya Prakash, Ashwini , Athmika Shetty, Lloyd Winston Pinto, Sowmya Bhat
DOI Link: https://doi.org/10.22214/ijraset.2024.62065
Certificate: View Certificate
Abstract
The automation of wall painting processes has garnered significant attention due to its potential to enhance efficiency, safety, and quality in the construction industry. This project focuses on developing an Automated Wall Painting system for both interior and exterior surfaces. The system employs readily available components such as Arduino Uno, NodeMCU, L293N H-Bridge Motor Driver, DC Motors, and other essential elements to achieve its objectives. The system comprises two primary components: the base and the support. The support component houses essential elements such as photoelectric seansors, paint spray mechanism, spray motor, and reservoir. Meanwhile, the base component incorporates four wheels, each driven by a DC motor, an obstacle sensor, and a 12V DC lead-acid battery for power supply. Upon activation, the system initiates the stepper motor, which drives the linear motion necessary for the support\\\'s back-and-forth movement along the wall surface. Simultaneously, the spray motor activates to ensure synchronized operation with the support motion, facilitating uniform paint application. This project addresses the challenges associated with manual wall painting, including labor intensiveness, safety concerns, and repetitive tasks. By automating the painting process, it aims to streamline operations, reduce labor dependency, and improve overall efficiency in construction projects. The system\\\'s simplicity, portability, and predictable performance make it a viable solution for enhancing productivity and safety in wall painting applications.
Introduction
I. INTRODUCTION
The construction industry plays a pivotal role in shaping the built environment, driving economic growth, and meeting the ever-growing demands for infrastructure. However, it faces challenges such as labor shortages, safety concerns, and the need for increased efficiency. In response to these challenges, automation technologies have emerged as a transformative force, offering solutions to enhance productivity, safety, and quality in construction processes.
The traditional methods of wall painting in construction projects have been labour-intensive, time-consuming, and often hazardous due to the use of chemicals and repetitive manual tasks. Furthermore, the shortage of skilled labour exacerbates these challenges, leading to delays and increased costs. Recognizing these issues, there has been a growing interest in automating painting processes to improve efficiency, safety, and overall project outcomes.
This project focuses on the development of an Automated Wall Painting system designed to address the shortcomings of manual painting methods. By leveraging modern technologies such as microcontrollers, motor drivers, and sensors, the system aims to streamline the painting process, reduce labour dependency, and mitigate safety risks associated with traditional methods.
The objective of this project is to create a system that is not only efficient and reliable but also cost-effective and accessible to construction professionals. By automating the painting process, it is anticipated that construction projects can be completed more quickly, with greater precision, and at lower costs, ultimately benefiting both contractors and clients.
This introduction sets the stage for the subsequent chapters, which will delve into the design, components, and working principles of the Automated Wall Painting system. Through this project, we seek to contribute to the ongoing efforts to modernize and improve efficiency in the construction industry, ultimately leading to safer, more sustainable, and higher-quality built environments.
IV. Methodology
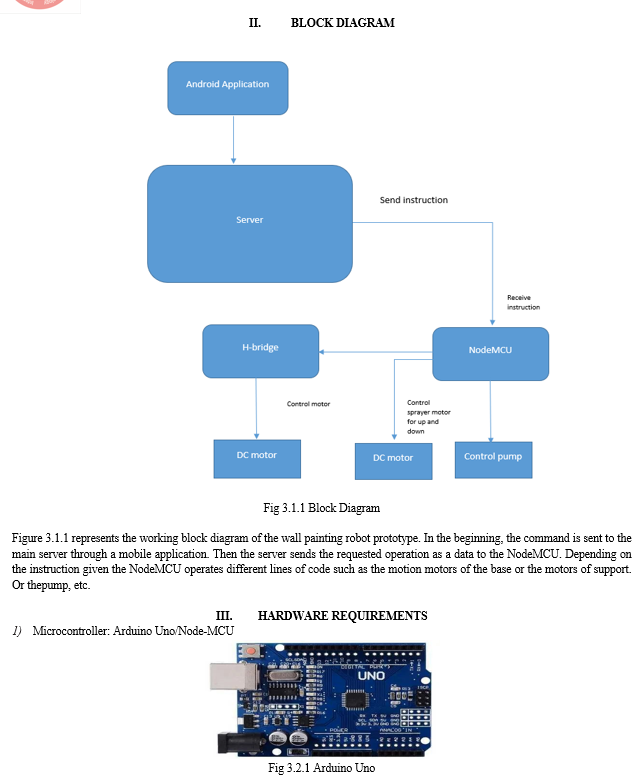
The wall painting robot operates through a systematic process that integrates hardware and software components to achieve automated painting tasks with precision and efficiency.
- Initialization: The system initializes upon receiving a command from the user via the mobile application. The command includes parameters such as the area to be painted, paint color, and any specific patterns or designs.
- Path Planning: The Node-MCU microcontroller processes the received command and generates a path plan for the robot's movement across the wall surface. This involves determining the optimal trajectory to cover the specified area while avoiding obstacles detected by the obstacle sensors.
- Movement Control: The microcontroller sends commands to the motor drivers, which control the two 12V DC motors responsible for the robot's base movement. By adjusting the speed and direction of each motor, the robot navigates along the planned path with precision and stability.
- Vertical Adjustment: As the robot moves along the wall, a secondary DC motor adjusts the height of the spray nozzle based on the wall's dimensions. This ensures consistent paint application and uniform coverage across different surface areas.
- Paint Delivery: The 9V water pump, connected to the spray nozzle, regulates the flow of paint as per the predefined settings. The microcontroller controls the pump's operation, ensuring controlled and uniform spraying of paint onto the wall surface.
- Obstacle Detection: Throughout the painting process, the robot continuously scans its surroundings using obstacle sensors. If an obstacle is detected along the planned path, the microcontroller adjusts the robot's trajectory to avoid collisions while maintaining painting accuracy.
- Feedback and Monitoring: The system provides real-time feedback to the user via the mobile application, displaying the progress of the painting task and any encountered obstacles or errors. This enables remote monitoring and intervention if necessary.
- Completion and Shutdown: Once the painting task is completed, the robot returns to its initial position or shuts down automatically, depending on the user's preference. The mobile application notifies the user of the task completion and allows for feedback or further instructions.
Through this coordinated workflow, the wall painting robot demonstrates efficient and precise automation of painting tasks, offering convenience and reliability in wall decoration projects.
Conclusion
The development of the Automated Wall Painting system marks a significant step forward in revolutionizing the construction industry\\\'s painting processes. By harnessing the power of modern technologies such as microcontrollers, motor drivers, and sensors, the system offers a promising solution to enhance efficiency, safety, and quality in wall painting tasks. Through extensive testing and validation, the prototype has demonstrated its ability to achieve precise and uniform paint application while navigating obstacles with ease. Moving forward, further enhancements such as advanced mobility features, smart paint selection mechanisms, and integration with BIM software present exciting opportunities for expanding the system\\\'s capabilities. By continuing to innovate and refine the Automated Wall Painting system, we aim to address the evolving needs of the construction industry and contribute to a safer, more efficient, and sustainable built environment.
References
[1] https://www.allsubjectjournal.com/assets/archives/2015/vol2issue4/46.pdf [2] https://www.researchgate.net/profile/Ashish-Borhade/publication/338037124_Automatic_Wall_Painting_Robot_Automatic_Wall_Painting_Robot/links/5dfb2b6ba6fdcc28372bf59c/Automatic-Wall-Painting-Robot-Automatic-Wall-Painting-Robot.pdf [3] https://dif7uuh3zqcps.cloudfront.net/wp-content/uploads/sites/11/2020/07/28182215/Automatic-Wall-Painting-Robot-with-Multiple-Colors.pdf [4] http://ijariie.com/AdminUploadPdf/Fabrication_of_Automatic_Wall_Painting_Machine_ijariie16677.pdf [5] https://ijireeice.com/wp-content/uploads/2021/05/IJIREEICE.2021.9530.pdf [6] https://www.ijite.com/citations/IJITE_5801_20243.pdf. [7] https://ijireeice.com/wp-content/uploads/2021/05/IJIREEICE.2021.9530.pdf
Copyright
Copyright © 2024 Adithya Prakash, Ashwini , Athmika Shetty, Lloyd Winston Pinto, Sowmya Bhat. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62065
Publish Date : 2024-05-14
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online