

Ijraset Journal For Research in Applied Science and Engineering Technology
Wi-Fi Based Multipurpose Agri-bot
Authors: Prof. Siddharth Bhorge, Swadha Joshi, Sanika Kadam, Sayali Kadam
DOI Link: https://doi.org/10.22214/ijraset.2024.62383
Certificate: View Certificate
Abstract
The proposed Agribot represents a technological advancement in Indian agriculture, aiming to address labor-intensive manual farming methods. This Wi-Fi-based multipurpose agribot helps in efficient spraying of fertilizers and weed removal, with the ultimate goal of enhancing crop yield while reducing manual labor costs. The literature review highlights the transformative impact of Agribots on various farming tasks, emphasizing their potential to revolutionize agriculture and contribute to global food security. The hardware setup(ESP8266) is complemented by software algorithms, Blynk configuration, and user-friendly interfaces for remote control.
Introduction
I. INTRODUCTION
Agriculture stands as the cornerstone of the Indian economy, with over 58% of rural households relying on it as their primary source of income. Traditional farming techniques continue to dominate the Indian agricultural landscape. In response to the challenges faced in Indian agriculture, a proposed Agribot aims to ease the process of spraying fertilizers. The current manual methods are labor-intensive, prompting the need for advanced equipment.[1] There are various last decade's research on digital technology applications in agriculture, focusing on smart farm machinery, irrigation, pest control, and more. It is found that AI and IoT adoption in agriculture has evolved from conceptual stages to execution, offering transformative solutions. Challenges in data security are acknowledged, but the cost-effectiveness and robustness of AI and IoT products suggest inevitable widespread adoption in agriculture.[2] One such agri-bot is powered by solar energy, the Agribot uses IoT technology for remote control via a mobile application. It employs ultrasonic sensors to detect obstacles, ensuring precise operation. The system includes drilling, sowing, and obstacle avoidance mechanisms.[3]
II. LITERATURE REVIEW
Various advancements are seen in automation and robotics within precision agriculture, focusing on planting, inspection, spraying, and harvesting operations. The goal is to enhance agricultural efficiency, reduce environmental impact, and ensure sustainable production. The review emphasizes the diverse challenges in different agricultural operations and suggests that a systematic development process considering various possibilities and cost-effectiveness is crucial. The implementation of autonomous systems in agriculture is seen as pivotal for future food security.[4] One such review explores the transformative impact of agricultural robots, or Agribots, on farming practices. Authored by N. Vamshidhar Reddy and colleagues from Vidya Jyothi Institute of Technology, the paper discusses the successes of Agribots in seed mapping, weed mapping, and micro-spraying. The authors emphasize the need for increased efficiency in agriculture to meet the growing global demand for food. The review concludes by predicting a promising future for Agribots, highlighting their potential to revolutionize the agricultural landscape and improve productivity.[5] Many researches have addressed key challenges encompassing object identification, task planning algorithms, and sensor optimization. Notable trends such as the rise of multi-robot systems, collaborative efforts between humans and robots, and the creation of virtual farms are illuminated.[6] Various multipurpose robots are proposed, one of them is multipurpose autonomous agricultural robot which utilizes Bluetooth control for ploughing, seeding, and irrigation, aiming to reduce labor in potentially hazardous areas. Key functions include soil digging, seed sowing, mud closing, and water spraying. Operated through a smartphone app, the robot enhances efficiency, minimizes human intervention, and ensures resource optimization in agriculture. With parameters analyzed for each function, the robot covers 11.4m distance and 5.2mx5.2m per minute, lifting a maximum weight of 150gm. The system's advantages include automated weed control, precise fertilizer use, and soil sensor-driven drip irrigation, contributing to crop establishment and care.[7]Another one is the Agribot, designed for agricultural purposes, aims to minimize farmers' labor while increasing work speed and accuracy. It autonomously performs essential farming tasks such as ploughing, seed sowing, and soil covering. Controlled by a PSoC controller from Cypress Semiconductor, USA, the robot utilizes basic components like DC motors, stepper motor, relay, and simple mechanical design.
The ploughing process involves spiked wheels, a seed container with a flip-flop mechanism for controlled seed dropping, and a metal sheet for soil covering. The PSoC controller is programmed to coordinate these functions, making the robot autonomous and efficient in improving farm productivity.[8] Similarly The Automatic Agricultural Robot, Agrobot, utilizes robotics and Arduino mega 2560 for automating crucial farming tasks like soil drilling, seed planting, and watering. Controlled via an Android application, Agrobot aims to alleviate labor-intensive challenges in traditional agriculture, enhancing efficiency and potentially increasing production. Its design incorporates features like obstacle detection and automation, contributing to precision in farming operations. The autonomous functionality offers a promising solution to streamline agricultural practices, reducing labor dependency, and promoting sustainability. Additionally, Agrobot presents an opportunity to address financial constraints for farmers, making advanced agricultural technology accessible for improved crop cultivation.[9] The NodeMCU can be used to design such agribot. The NodeMCU ESP8266, a low-cost Wi-Fi chip, serves as a crucial component in Internet of Things (IoT) development. This open-source platform, employing LUA programming language, offers an accessible firmware solution for ESP8266. With applications in various domains such as environmental monitoring, smart agriculture, and surveillance systems, NodeMCU's versatility, low cost, and powerful features make it an ideal choice for IoT projects, facilitating the creation of prototypes and fostering innovation in IoT product development.[10]
The ultimate goal of the WiFi-based multipurpose agribot project is to enhance agricultural practices through the development and deployment of a versatile and intelligent robotic system. The agribot aims to revolutionize farming operations by providing efficient, automated solutions for tasks such as spraying, weed cutting, and water pumping. The integration of WiFi connectivity enables remote monitoring and control, contributing to precision agriculture and sustainable farming practices.
The main objectives of the work are:
- To ease the process of spraying fertilizers and weed removal.
- To help to increase the crop yield.
- To cut down on manual labor cost.
III. METHODOLOGY
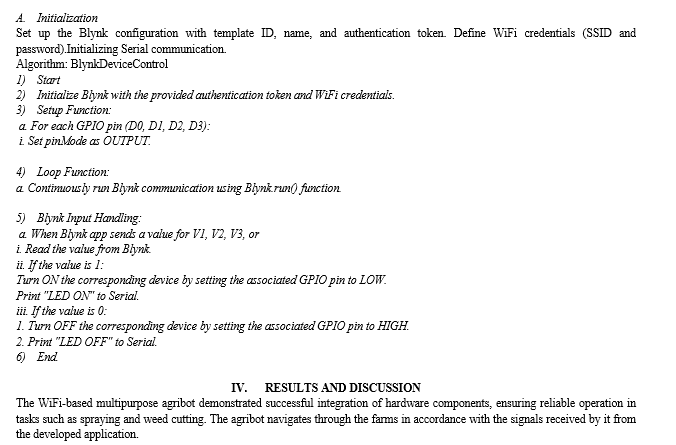
The development of a Wi-Fi based multipurpose agribot is a multifaceted process that demands a structured methodology to ensure a seamless integration of hardware and software components. The initial stage involves a definition of the agribot's requirements, its key functionalities, such as spraying and weed cutting. Alongside this, technical specifications, power supply requirements, load capacity, and size constraints are detailed. Additionally, the consideration of remote operation and automation features is emphasized to meet the evolving demands of modern agriculture.
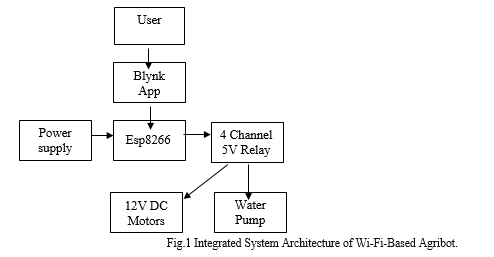
Further the hardware setup, involves creating a chassis that accommodates the various components while ensuring stability and adaptability across different terrains.
The components are assembled are as follows:
- ESP8266 Wi-Fi Module: The ESP8266 WiFi Module is a standalone system-on-chip (SOC) featuring a built-in TCP/IP protocol stack, enabling any microcontroller to connect to your WiFi network. It can operate as a standalone application or assist another application processor by managing all WiFi networking tasks. Each module arrives pre-loaded with firmware supporting an AT command set, making it easy to integrate with Arduino devices and providing WiFi capabilities akin to a WiFi Shield. Known for its affordability, the ESP8266 boasts a large and continually expanding community of users.
- 12V DC Motors:12V DC motors are built with several essential components(Armature, commutator, brushes, magnets, stator, bearings) that enable their operation. 12V DC motors are commonly utilized in various applications such as automotive functions (electric windows, windshield wipers, fuel pumps).
- Submersible Water Pump : The micro submersible water pump operates by utilizing a water suction mechanism to draw water in through its inlet and expel it through the outlet. It operates within a voltage range of DC 3V to 5V, with a flow rate between 1.2 to 1.6 liters per minute and consumes 0.1 to 0.2A of current. It can suction water from a maximum distance of 0.8 meters. The outlet has an outer diameter of 7.5mm and an inner diameter of 5.0mm, while the inlet diameter is also 5.0mm. The pump comes with a wire length of 200mm and has dimensions of 45 x 30 x 25mm, weighing 30g.
- 4 Channel 5V Relay Module: It offers a simple and effective solution for controlling up to four devices simultaneously. With its 5V input, this versatile relay module is perfect for various automation projects, making it a must-have component for DIY enthusiasts and professionals alike.
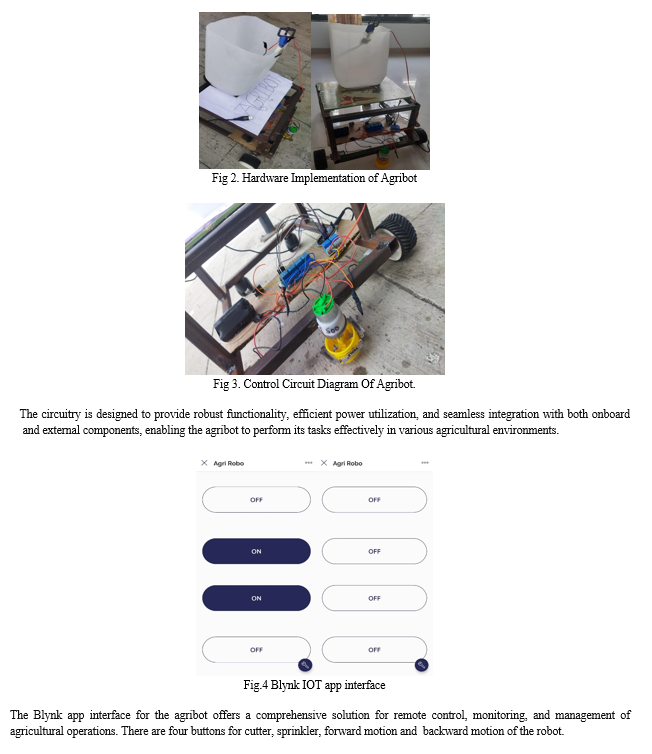
A user-friendly interface is crafted to facilitate remote control and automation, allowing for seamless operation by farmers. Algorithms are implemented to enable precise control of the sprayer and weed-cutting mechanisms. The programming of the 4-channel 5V relay is crucial at this stage, as it dictates the switching of loads, for agricultural operations. This phase ensures that the agribot is not only technically robust but also user-friendly and capable of meeting the specific needs of farmers.
Conclusion
The WiFi-based multipurpose agribot project has effectively demonstrated its potential in revolutionizing precision agriculture. Successful integration of hardware components, robust software algorithms, and user-friendly features ensures seamless operation in tasks such as spraying and weed cutting. The incorporation of home automation, including a 4-channel 5V relay, adds versatility to its functionalities. Its success marks a significant stride in advancing modern farming practices, contributing to a connected and efficient farming ecosystem. However its manually difficult to follow the robot and give commands using the app. The future scope for the WiFi-controlled agricultural robot project includes integrating sensors for data-driven decision-making, implementing AI for intelligent insights, incorporating cameras for crop monitoring, enabling autonomous navigation, and enhancing remote monitoring capabilities. Additionally, exploring energy efficiency, cloud integration, community collaboration, and improving mobile app features are essential for continuous project development and impact.
References
[1] Santhosh, K. S., Anusha, M., & Anju, K. C. (2019, May). IoT Based Agriculture Using AGRIBOT. In 2019 4th International Conference on Recent Trends on Electronics, Information, Communication & Technology (RTEICT) (pp. 1520-1526). IEEE. [2] Subeesh, A., & Mehta, C. R. (2021). Automation and digitization of agriculture using artificial intelligence and internet of things. Artificial Intelligence in Agriculture, 5, 278-291. [3] Kumar, Y. N., Haswanth, C., Kiran, M. H., Rao, M. K., Raj, R., Saramekala, G. K., & Chakrobarty, P. A. (2019, July). Automated Seed Sowing Agribot. In 2019 IEEE 1st International Conference on Energy, Systems and Information Processing (ICESIP) (pp. 1-5). IEEE. [4] Mahmud, M. S. A., Abidin, M. S. Z., Emmanuel, A. A., & Hasan, H. S. (2020). Robotics and automation in agriculture: present and future applications. Applications of Modelling and Simulation, 4, 130-140. [5] Reddy, N. V., Reddy, A. V. V. V., Pranavadithya, S., & Kumar, J. J. (2016). A critical review on agricultural robots. International Journal of Mechanical Engineering and Technology, 7(4), 183-188. [6] R Shamshiri, R., Weltzien, C., Hameed, I. A., J Yule, I., E Grift, T., Balasundram, S. K., ... & Chowdhary, G. (2018). Research and development in agricultural robotics: A perspective of digital farming. [7] Sowjanya, K. D., Sindhu, R., Parijatham, M., Srikanth, K., & Bhargav, P. (2017, April). Multipurpose autonomous agricultural robot. In 2017 International conference of Electronics, Communication and Aerospace Technology (ICECA) (Vol. 2, pp. 696-699). IEEE. [8] Gollakota, A., & Srinivas, M. B. (2011, December). Agribot—A multipurpose agricultural robot. In 2011 Annual IEEE India Conference (pp. 1-4). IEEE. [9] Prajith, A. S., Nowfiya, B. S., Noushad, N., Subi, S., & Lal, D. (2020, October). Automatic Agricultural Robot—Agrobot. In 2020 IEEE Bangalore Humanitarian Technology Conference (B-HTC) (pp. 1-5). IEEE. [10] Parihar, Y. S. (2019). Internet of things and nodemcu. journal of emerging technologies and innovative research, 6(6), 1085.
Copyright
Copyright © 2024 Prof. Siddharth Bhorge, Swadha Joshi, Sanika Kadam, Sayali Kadam. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62383
Publish Date : 2024-05-19
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online